文章目录
- [1. 理论推导](#1. 理论推导)
- [2. 代码实现](#2. 代码实现)
NeRF 将视锥体空间的射线 r = o + t d \mathbf{r} = \mathbf{o} + t\mathbf{d} r=o+td 转换到归一化设备坐标系(Normalized Device Coordinates, NDC)空间上。现在从理论推导和代码实现两个角度进行分析。
1. 理论推导
投影变换将视锥体映射到 − 1 , 1 3 -1, 1^3 −1,13 的立方体中。参考博客:计算机图形学 - 投影变换推导 可得,投影变换矩阵 M p e r s p = ( n r 0 0 0 0 n t 0 0 0 0 − f + n f − n − 2 f n f − n 0 0 − 1 0 ) \mathbf{M}_{persp} = \begin{pmatrix} \dfrac{n}{r} & 0 & 0 & 0 \\ 0 & \dfrac{n}{t} & 0 & 0 \\ 0 & 0 & -\dfrac{f + n}{f - n} & -\dfrac{2fn}{f-n} \\ 0 & 0 & -1 & 0 \end{pmatrix} Mpersp= rn0000tn0000−f−nf+n−100−f−n2fn0 。假设空间存在三维点 ( x y z 1 ) \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} xyz1 ,经过投影变换后三维点的坐标为 ( x ′ y ′ z ′ 1 ) \begin{pmatrix} x' \\ y' \\ z' \\ 1 \end{pmatrix} x′y′z′1 ,则有:
( x ′ y ′ z ′ 1 ) = ( n r 0 0 0 0 n t 0 0 0 0 − f + n f − n − 2 f n f − n 0 0 − 1 0 ) ( x y z 1 ) = ( n x r n y t − f + n f − n z − 2 f n f − n − z ) = ( − n x r z − n y t z f + n f − n + 2 f n ( f − n ) z 1 ) (1) \begin{pmatrix} x' \\ y' \\ z' \\ 1 \end{pmatrix} = \begin{pmatrix} \dfrac{n}{r} & 0 & 0 & 0 \\ 0 & \dfrac{n}{t} & 0 & 0 \\ 0 & 0 & -\dfrac{f+n}{f-n} & -\dfrac{2fn}{f-n} \\ 0 & 0 & -1 & 0 \end{pmatrix} \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} =\begin{pmatrix} \dfrac{nx}{r} \\ \\ \dfrac{ny}{t} \\ \\ -\dfrac{f+n}{f-n}z - \dfrac{2fn}{f-n} \\ \\ -z \end{pmatrix} = \begin{pmatrix} -\dfrac{nx}{rz} \\ \\ -\dfrac{ny}{tz} \\ \\ \dfrac{f+n}{f-n} + \dfrac{2fn}{(f-n)z} \\ \\ 1 \end{pmatrix} \tag{1} x′y′z′1 = rn0000tn0000−f−nf+n−100−f−n2fn0 xyz1 = rnxtny−f−nf+nz−f−n2fn−z = −rznx−tznyf−nf+n+(f−n)z2fn1 (1)假设视锥体空间的射线 r = o + t d \mathbf{r} = \mathbf{o} + t\mathbf{d} r=o+td 映射到 NDC 空间后为 r ′ = o ′ + t ′ d ′ \mathbf{r'} = \mathbf{o'} + t'\mathbf{d'} r′=o′+t′d′,即存在函数使得 π ( o + t d ) = o ′ + t ′ d ′ \pi(\mathbf{o} + t\mathbf{d}) = \mathbf{o'} + t'\mathbf{d'} π(o+td)=o′+t′d′。
令 ( − n x r z − n y t z f + n f − n + 2 f n ( f − n ) z ) = ( a x x z a y y z a z + b z z ) (2) \begin{pmatrix} -\dfrac{nx}{rz} \\ \\ -\dfrac{ny}{tz} \\ \\ \dfrac{f+n}{f-n} + \dfrac{2fn}{(f-n)z} \end{pmatrix} = \begin{pmatrix} \dfrac{a_x x}{z} \\ \\ \dfrac{a_y y}{z} \\ \\ a_z + \dfrac{b_z}{z} \end{pmatrix} \tag{2} −rznx−tznyf−nf+n+(f−n)z2fn = zaxxzayyaz+zbz (2)即有 { a x = − n r a y = − n t a z = f + n f − n b z = 2 f n f − n \begin{cases} a_x = -\dfrac{n}{r} \\ \\ a_y = -\dfrac{n}{t} \\ \\ a_z = \dfrac{f + n}{f - n} \\ \\ b_z = \dfrac{2fn}{f - n} \end{cases} ⎩ ⎨ ⎧ax=−rnay=−tnaz=f−nf+nbz=f−n2fn 将 ( x y z ) = ( o x + t d x o y + t d y o z + t d z ) \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} o_x + td_x \\ o_y + td_y \\ o_z + td_z \end{pmatrix} xyz = ox+tdxoy+tdyoz+tdz 和 ( x ′ y ′ z ′ ) = ( o x ′ + t ′ d x ′ o y ′ + t ′ d y ′ o z ′ + t ′ d z ′ ) \begin{pmatrix} x' \\ y' \\ z' \end{pmatrix} = \begin{pmatrix} o_x' + t'd_x' \\ o_y' + t'd_y' \\ o_z' + t'd_z' \end{pmatrix} x′y′z′ = ox′+t′dx′oy′+t′dy′oz′+t′dz′ 带入方程 ( 2 ) (2) (2) 可得,
( a x o x + t d x o z + t d z a y o y + t d y o z + t d z a z + b z o z + t d z ) = ( o x ′ + t ′ d x ′ o y ′ + t ′ d y ′ o z ′ + t ′ d z ′ ) \begin{pmatrix} a_x \dfrac{o_x + t d_x}{o_z + t d_z} \\ \\ a_y \dfrac{o_y + t d_y}{o_z + t d_z} \\ \\ a_z + \dfrac{b_z}{o_z + t d_z} \end{pmatrix} =\begin{pmatrix} o'_x + t' d'_x \\ \\ o'_y + t' d'_y \\ \\ o'_z + t' d'_z \end{pmatrix} axoz+tdzox+tdxayoz+tdzoy+tdyaz+oz+tdzbz = ox′+t′dx′oy′+t′dy′oz′+t′dz′ 由于投影变换不改变射线的起点位置(相机光心位置),即 ( o x o y o z ) = ( o x ′ o y ′ o z ′ ) \begin{pmatrix} o_x \\ o_y \\ o_z \end{pmatrix} = \begin{pmatrix} o_x' \\ o_y' \\ o_z' \end{pmatrix} oxoyoz = ox′oy′oz′ 。
令 t = 0 t = 0 t=0 有
o ′ = ( o x ′ o y ′ o z ′ ) = ( a x o x o z a y o y o z a z + b z o z ) = ( − n r ⋅ o x o z − n t ⋅ o y o z f + n f − n + 2 f n f − n ⋅ 1 o z ) = π ( o ) (3) \mathbf{o}' = \begin{pmatrix} o'x \\ \\ o'y \\ \\ o'z \end{pmatrix} = \begin{pmatrix} a_x \dfrac{o_x}{o_z} \\ \\ a_y \dfrac{o_y}{o_z} \\ \\ a_z + \dfrac{b_z}{o_z} \end{pmatrix} = \begin{pmatrix} -\dfrac{n}{r} \cdot \dfrac{o_x}{o_z} \\ \\ -\dfrac{n}{t} \cdot \dfrac{o_y}{o_z} \\ \\ \dfrac{f + n}{f - n} + \dfrac{2fn}{f - n} \cdot\dfrac{1}{o_z} \end{pmatrix} = \pi(\mathbf{o}) \tag{3} o′= ox′oy′oz′ = axozoxayozoyaz+ozbz = −rn⋅ozox−tn⋅ozoyf−nf+n+f−n2fn⋅oz1 =π(o)(3)则有:
( t ′ d x ′ t ′ d y ′ t ′ d z ′ ) = ( o x ′ + t ′ d x ′ o y ′ + t ′ d y ′ o z ′ + t ′ d z ′ ) − ( o x ′ o y ′ o z ′ ) = ( a x o x + t d x o z + t d z a y o y + t d y o z + t d z a z + b z o z + t d z ) − ( a x o x o z a y o y o z a z + b z o z ) = ( a x o z ( o x + t d x ) − o x ( o z + t d z ) ( o z + t d z ) o z a y o z ( o y + t d y ) − o y ( o z + t d z ) ( o z + t d z ) o z b z o z − ( o z + t d z ) ( o z + t d z ) o z ) = ( a x t d z o z + t d z ( d x d z − o x o z ) a y t d z o z + t d z ( d y d z − o y o z ) − b z t d z o z + t d z 1 o z ) = t d z o z + t d z ( a x ( d x d z − o x o z ) a y ( d y d z − o y o z ) − b z 1 o z ) \begin{align*} \begin{pmatrix} t'd_x' \\ \\ t'd_y' \\ \\ t'd_z' \end{pmatrix} = \begin{pmatrix} o_x' + t'd_x' \\ \\ o_y' + t'd_y' \\ \\ o_z' + t'd_z' \end{pmatrix} - \begin{pmatrix} o_x' \\ \\ o_y' \\ \\ o_z' \end{pmatrix} &= \begin{pmatrix} a_x \dfrac{o_x + t d_x}{o_z + t d_z} \\ \\ a_y \dfrac{o_y + t d_y}{o_z + t d_z} \\ \\ a_z + \dfrac{b_z}{o_z + t d_z} \end{pmatrix} - \begin{pmatrix} a_x \dfrac{o_x}{o_z} \\ \\ a_y \dfrac{o_y}{o_z} \\ \\ a_z + \dfrac{b_z}{o_z} \end{pmatrix} = \begin{pmatrix} a_x \dfrac{o_z (o_x + t d_x) - o_x (o_z + t d_z)}{(o_z + t d_z) o_z} \\ \\ a_y \dfrac{o_z (o_y + t d_y) - o_y (o_z + t d_z)}{(o_z + t d_z) o_z} \\ \\ b_z \dfrac{o_z - (o_z + t d_z)}{(o_z + t d_z) o_z} \end{pmatrix} \\ &= \begin{pmatrix} a_x \dfrac{t d_z}{o_z + t d_z} \left( \dfrac{d_x}{d_z} - \dfrac{o_x}{o_z} \right) \\ \\ a_y \dfrac{t d_z}{o_z + t d_z} \left( \dfrac{d_y}{d_z} - \dfrac{o_y}{o_z} \right) \\ \\ -b_z \dfrac{t d_z}{o_z + t d_z} \dfrac{1}{o_z} \end{pmatrix} = \dfrac{t d_z}{o_z + t d_z} \begin{pmatrix} a_x \left( \dfrac{d_x}{d_z} - \dfrac{o_x}{o_z} \right) \\ \\ a_y \left( \dfrac{d_y}{d_z} - \dfrac{o_y}{o_z} \right) \\ \\ -b_z \dfrac{1}{o_z} \end{pmatrix} \end{align*} t′dx′t′dy′t′dz′ = ox′+t′dx′oy′+t′dy′oz′+t′dz′ − ox′oy′oz′ = axoz+tdzox+tdxayoz+tdzoy+tdyaz+oz+tdzbz − axozoxayozoyaz+ozbz = ax(oz+tdz)ozoz(ox+tdx)−ox(oz+tdz)ay(oz+tdz)ozoz(oy+tdy)−oy(oz+tdz)bz(oz+tdz)ozoz−(oz+tdz) = axoz+tdztdz(dzdx−ozox)ayoz+tdztdz(dzdy−ozoy)−bzoz+tdztdzoz1 =oz+tdztdz ax(dzdx−ozox)ay(dzdy−ozoy)−bzoz1 不妨令
{ t ′ = t d z o z + t d z = 1 − o z o z + t d z d ′ = ( d x ′ d y ′ d z ′ ) = ( a x ( d x d z − o x o z ) a y ( d y d z − o y o z ) − b z 1 o z ) (4) \begin{cases} t' = \dfrac{td_z}{o_z + td_z} = 1 - \dfrac{o_z}{o_z + td_z} \\ \\ \mathbf{d'} = \begin{pmatrix} d_x' \\ \\ d_y' \\ \\ d_z' \end{pmatrix} = \begin{pmatrix} a_x \left( \dfrac{d_x}{d_z} - \dfrac{o_x}{o_z} \right) \\ \\ a_y \left( \dfrac{d_y}{d_z} - \dfrac{o_y}{o_z} \right) \\ \\ -b_z \dfrac{1}{o_z} \end{pmatrix} \end{cases} \tag{4} ⎩ ⎨ ⎧t′=oz+tdztdz=1−oz+tdzozd′= dx′dy′dz′ = ax(dzdx−ozox)ay(dzdy−ozoy)−bzoz1 (4)一方面,在 NeRF 中远平面选取为 z = ∞ z = ∞ z=∞,所以有
{ a z = lim f → ∞ f + n f − n = lim f → ∞ 1 + n f 1 − n f = 1 b z = lim f → ∞ 2 f n f − n = lim f → ∞ 2 n 1 − n f = 2 n \left\{ \begin{aligned} a_z &= \lim{f \to \infty} \dfrac{f+n}{f-n} = \lim{f \to \infty} \dfrac{1+\dfrac{n}{f}}{1-\dfrac{n}{f}} = 1 \\ b_z &= \lim{f \to \infty} \dfrac{2fn}{f-n} = \lim_{f \to \infty} \dfrac{2n}{1-\dfrac{n}{f}} = 2n \end{aligned} \right. ⎩ ⎨ ⎧azbz=f→∞limf−nf+n=f→∞lim1−fn1+fn=1=f→∞limf−n2fn=f→∞lim1−fn2n=2n另一方面,在 NeRF 中有 r = W 2 r = \dfrac{W}{2} r=2W 和 t = H 2 t = \dfrac{H}{2} t=2H( H H H 和 W W W 分别为图像的宽度和高度),并且 n = f c a m n = f_{cam} n=fcam( f c a m f_{cam} fcam 为相机的焦距),所以有
{ a x = − f c a m W / 2 a y = − f c a m H / 2 \left\{ \begin{aligned} a_x = -\dfrac{f_{cam}}{W/2} \\ a_y = -\dfrac{f_{cam}}{H/2} \end{aligned} \right. ⎩ ⎨ ⎧ax=−W/2fcamay=−H/2fcam综上可得,NDC 空间中射线的起点 o ′ \mathbf{o'} o′ 和方向 d ′ \mathbf{d'} d′ 分别为:
{ o ′ = ( − f c a m W / 2 o x o z − f c a m H / 2 o y o z 1 + 2 n o z ) d ′ = ( − f c a m W / 2 ( d x d z − o x o z ) − f c a m H / 2 ( d y d z − o y o z ) − 2 n 1 o z ) \left\{ \begin{aligned} \mathbf{o}' &= \begin{pmatrix} -\dfrac{f_{cam}}{W/2} \dfrac{o_x}{o_z} \\ \\ -\dfrac{f_{cam}}{H/2} \dfrac{o_y}{o_z} \\ \\ 1 + \dfrac{2n}{o_z} \end{pmatrix} \\ \\ \mathbf{d}' &= \begin{pmatrix} -\dfrac{f_{cam}}{W/2} \left( \dfrac{d_x}{d_z} - \dfrac{o_x}{o_z} \right) \\ \\ -\dfrac{f_{cam}}{H/2} \left( \dfrac{d_y}{d_z} - \dfrac{o_y}{o_z} \right) \\ \\ -2n \dfrac{1}{o_z} \end{pmatrix} \end{aligned} \right. ⎩ ⎨ ⎧o′d′= −W/2fcamozox−H/2fcamozoy1+oz2n = −W/2fcam(dzdx−ozox)−H/2fcam(dzdy−ozoy)−2noz1
2. 代码实现
在转换到 NDC 空间前,首先将射线的起点 o \mathbf{o} o 移动到近平面与射线的交点上,这使得后续进行采样时可以忽略相机光心到近平面这段距离。
令
o z + t n d z = − n o_z + t_n d_z = -n oz+tndz=−n 解得:
t n = − n + o z d z t_n = -\dfrac{n + o_z}{d_z} tn=−dzn+oz
具体代码实现如下:
python
def ndc_rays(H, W, focal, near, rays_o, rays_d):
# Shift ray origins to near plane
t = -(near + rays_o[..., 2]) / rays_d[..., 2]
rays_o = rays_o + t[..., None] * rays_d
# Projection
o0 = -1. / (W / (2. * focal)) * rays_o[..., 0] / rays_o[..., 2]
o1 = -1. / (H / (2. * focal)) * rays_o[..., 1] / rays_o[..., 2]
o2 = 1. + 2. * near / rays_o[..., 2]
d0 = -1. / (W / (2. * focal)) * (rays_d[..., 0] / rays_d[..., 2] - rays_o[..., 0] / rays_o[..., 2])
d1 = -1. / (H / (2. * focal)) * (rays_d[..., 1] / rays_d[..., 2] - rays_o[..., 1] / rays_o[..., 2])
d2 = -2. * near / rays_o[..., 2]
rays_o = torch.stack([o0, o1, o2], -1)
rays_d = torch.stack([d0, d1, d2], -1)
return rays_o, rays_d为什么要将原始的视锥空间转换到 NDC 空间?
现在从不同角度分析 NDC 空间的作用:
1)根据 NeRF 论文有:
Once we convert to the NDC ray, this allows us to simply sample t' 0 linearly from 0 to 1 in order to get a linear sampling in disparity from n to ∞ in the original space.
在原始视锥空间中, t t t 取值为 0 到 ∞ ∞ ∞,而在 NDC 空间中, t ′ t' t′ 取值为 0 到 1。当 t t t 为 0 时, t ′ = 1 − o z o z + t d z = 0 t' = 1 - \dfrac{o_z}{o_z + td_z} = 0 t′=1−oz+tdzoz=0,当 t → ∞ t→∞ t→∞ 时, t ′ → 1 t'→1 t′→1。 z = o z + t d z z = o_z + t d_z z=oz+tdz 为采样点在原始视锥空间的深度,所以 t ′ = 1 − o z z t' = 1 - \dfrac{o_z}{z} t′=1−zoz。由于在转换到 NDC 空间之前,已经将射线的起点移动到射线与近平面的交点上(即 o z = − n o_z = -n oz=−n),则有 t ′ = 1 + n z t' = 1 + \dfrac{n}{z} t′=1+zn。
考虑到视差 d d d 和深度 z z z 存在关系: d = 1 ∣ z ∣ = 1 − z d = \dfrac{1}{|z|}=\dfrac{1}{-z} d=∣z∣1=−z1(因为 z < 0 z < 0 z<0),所以 t ′ = 1 − n d t' = 1 - nd t′=1−nd,即有 d = 1 − t ′ n d = \dfrac{1 - t'}{n} d=n1−t′。 t ′ = 0 t' = 0 t′=0 对应于视差 d = 1 n d = \dfrac{1}{n} d=n1, t ′ = 1 t' = 1 t′=1 对应于视差 d = 0 d = 0 d=0(无穷远处的采样点的视差为 0)。
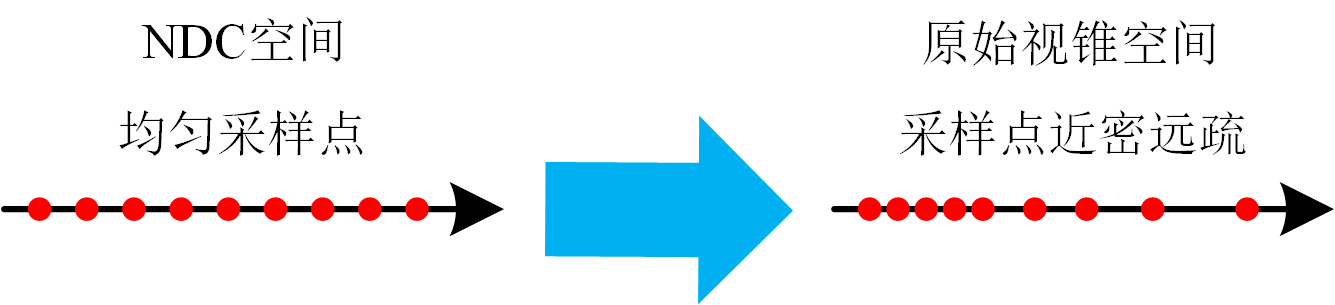
对 NDC 空间的 t ′ ∈ 0 , 1 t'∈0, 1 t′∈0,1 进行均匀取点,等价于在原始视锥空间中对视差 d ∈ 0 , 1 n d∈0, \\dfrac{1}{n} d∈0,n1 进行均匀分布采样。在原始空间中对视差进行均匀采样(即深度上非线性采样,近处密集,远处稀疏)是比较复杂的,需要根据深度进行非均匀计算。在 NDC 空间只需要做最简单的线性均匀采样,就可以获得原始空间中在视差上均匀分布的采样点。这也是将原始视锥空间转换为 NDC 空间的优势之一。
绘制视差 d d d 与深度 z z z 之间的曲线图:
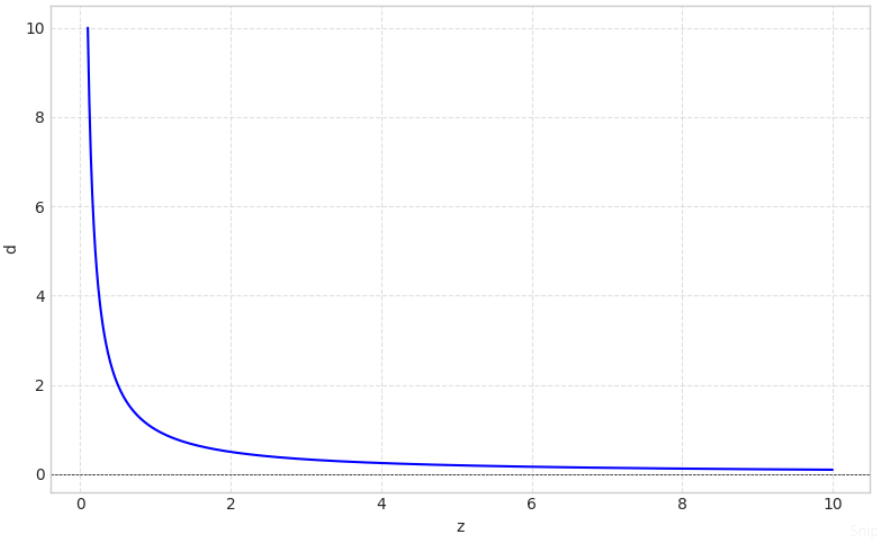
从图中可以看出,近处的点的视差值较大,而远处的点的视差值较小,因此根据视差均匀分布采样得到的点大部分是近处的点。这种采样策略自适应地分配了采样点,在近处密集采样捕捉细节,在远处稀疏采样节省计算资源,显著提高了采样效率。近处正是物体细节丰富、图像变化剧烈的地方,需要更密集的采样才能准确捕捉几何边缘、纹理细节和光照变化(如阴影边界),而远处的物体通常较小、细节较少、变化平缓,不需要那么密集的采样。如下图所示: