新建终端,键入命令
roslaunch wpr_simulation wpb_simple.launch 再新建终端,键入命令
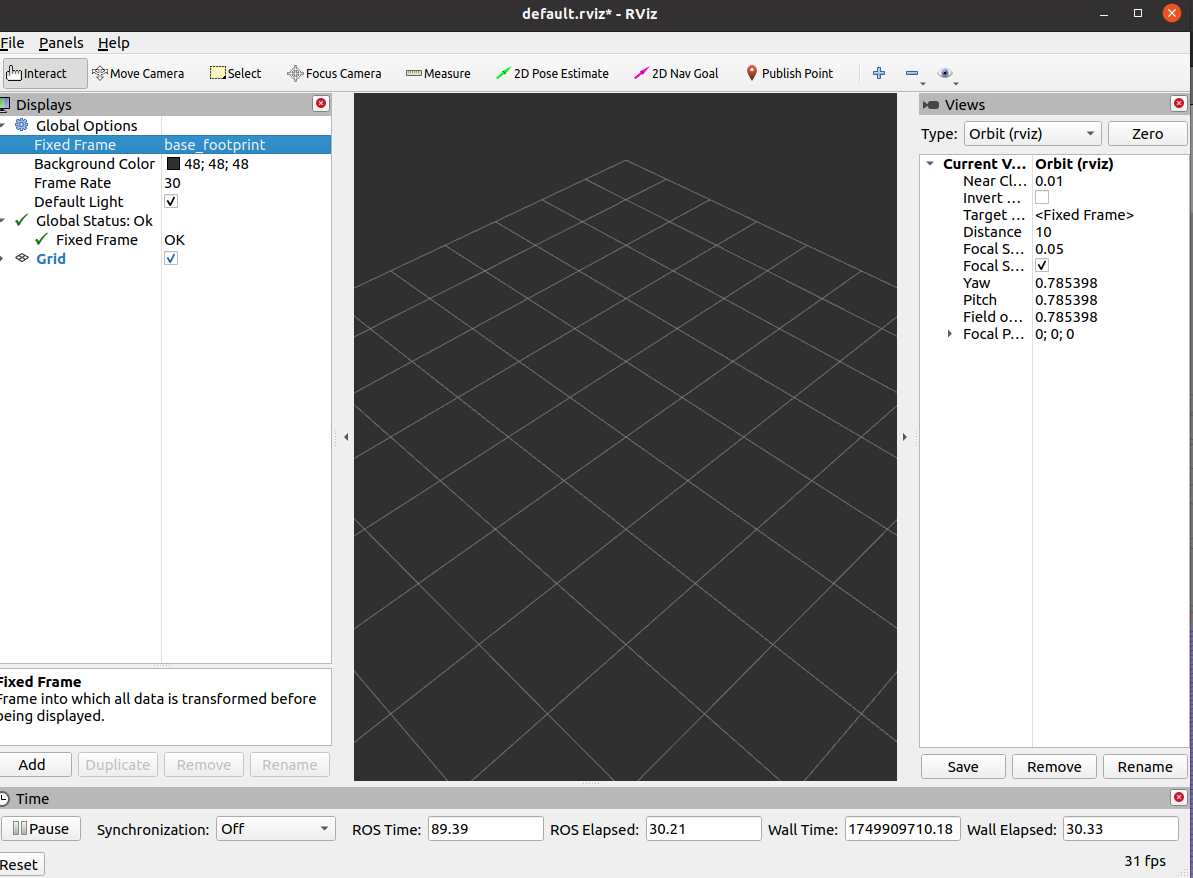
rviz修改Fix Frame 为 base_footprint
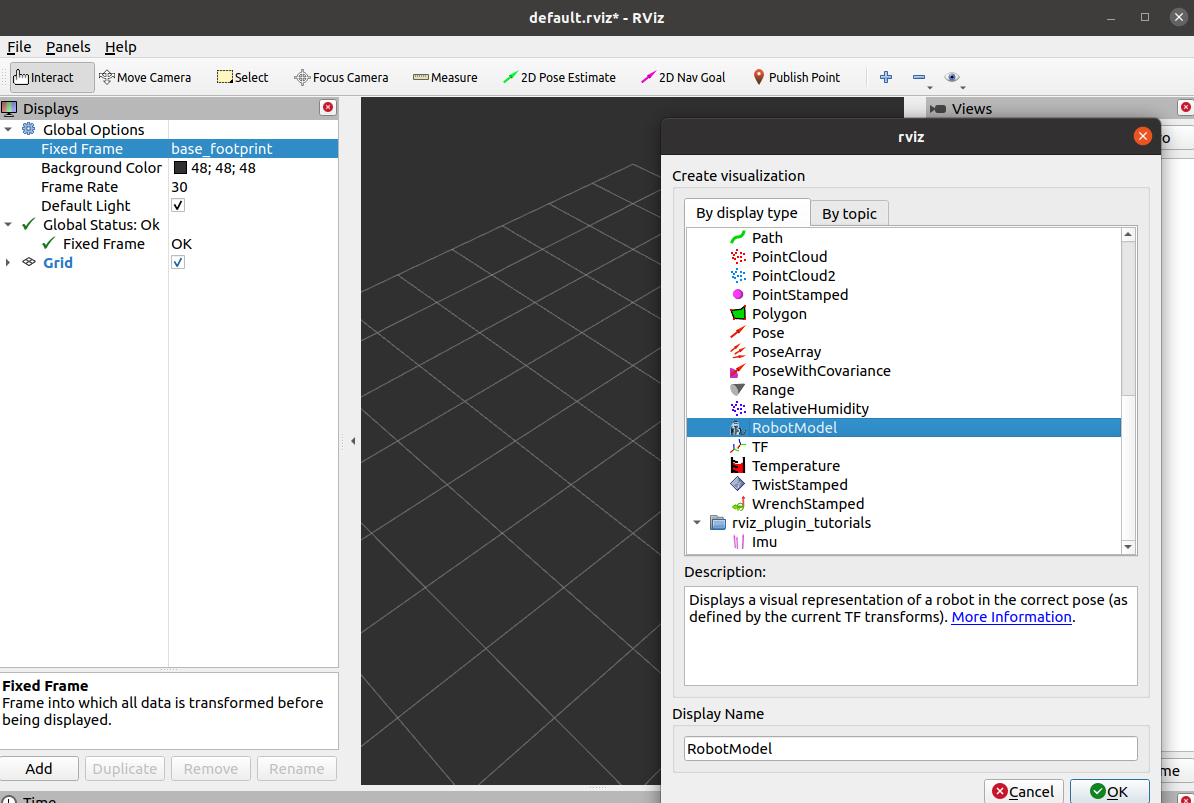
点击add之后选择RobotModel
再增加一个LaserScan
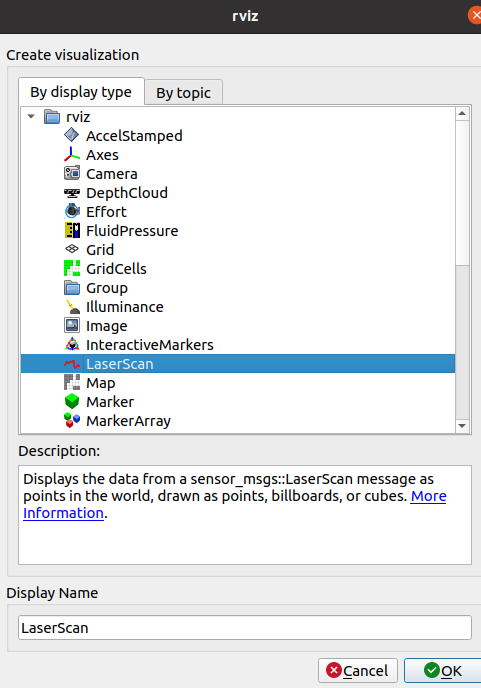
选择激光雷达话题
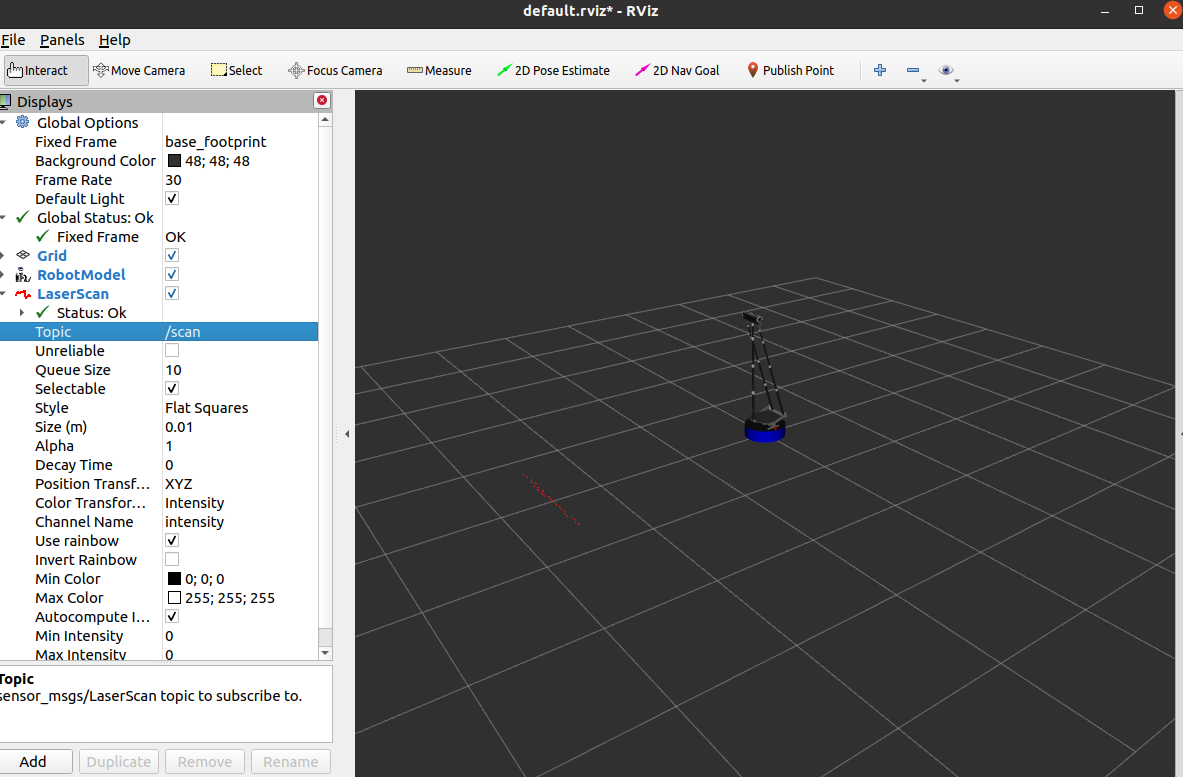
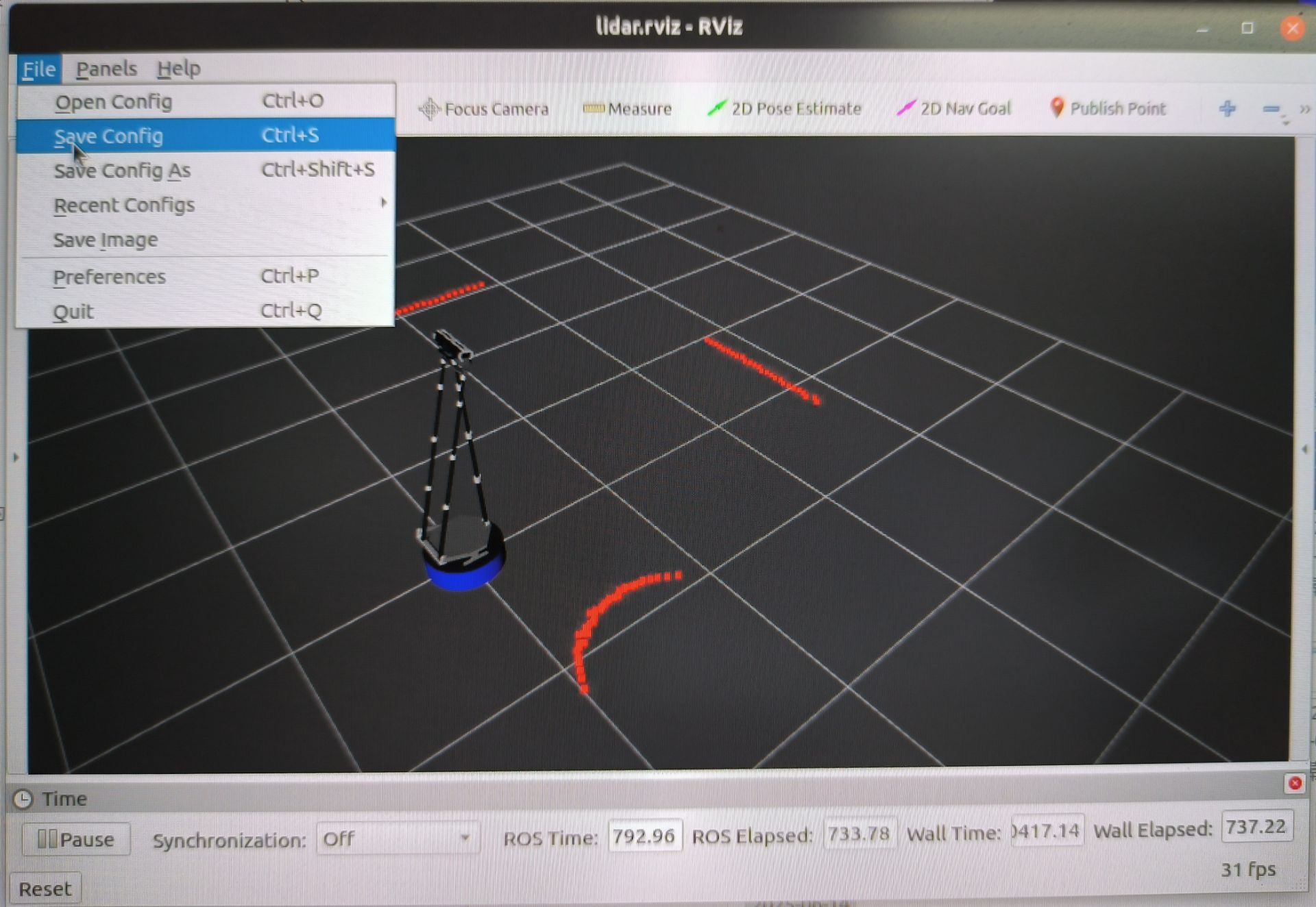
可视化效果
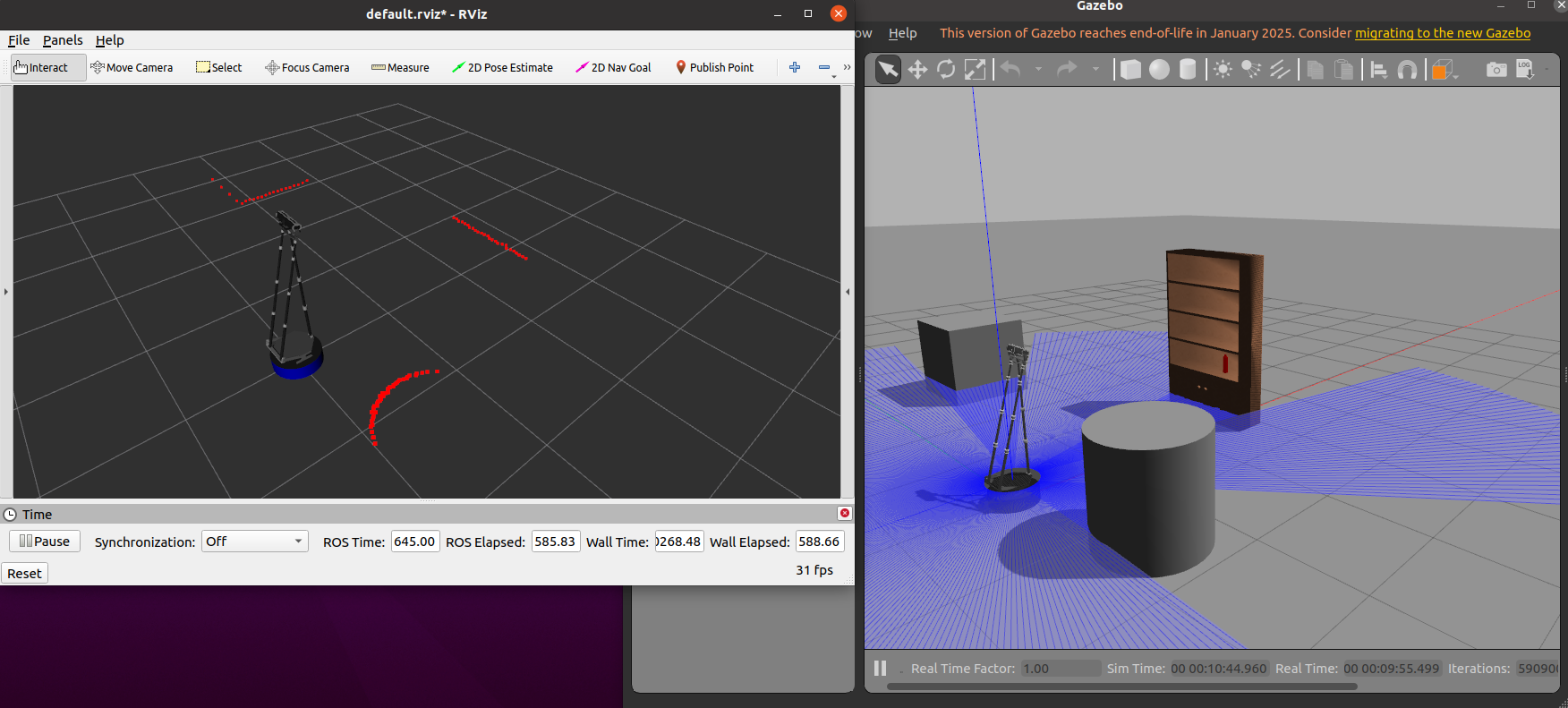
配置的两种方法
1.在Gazebo运行的基础上,新建终端运行下列命令
roslaunch wpr_simulation wpb_rviz.launch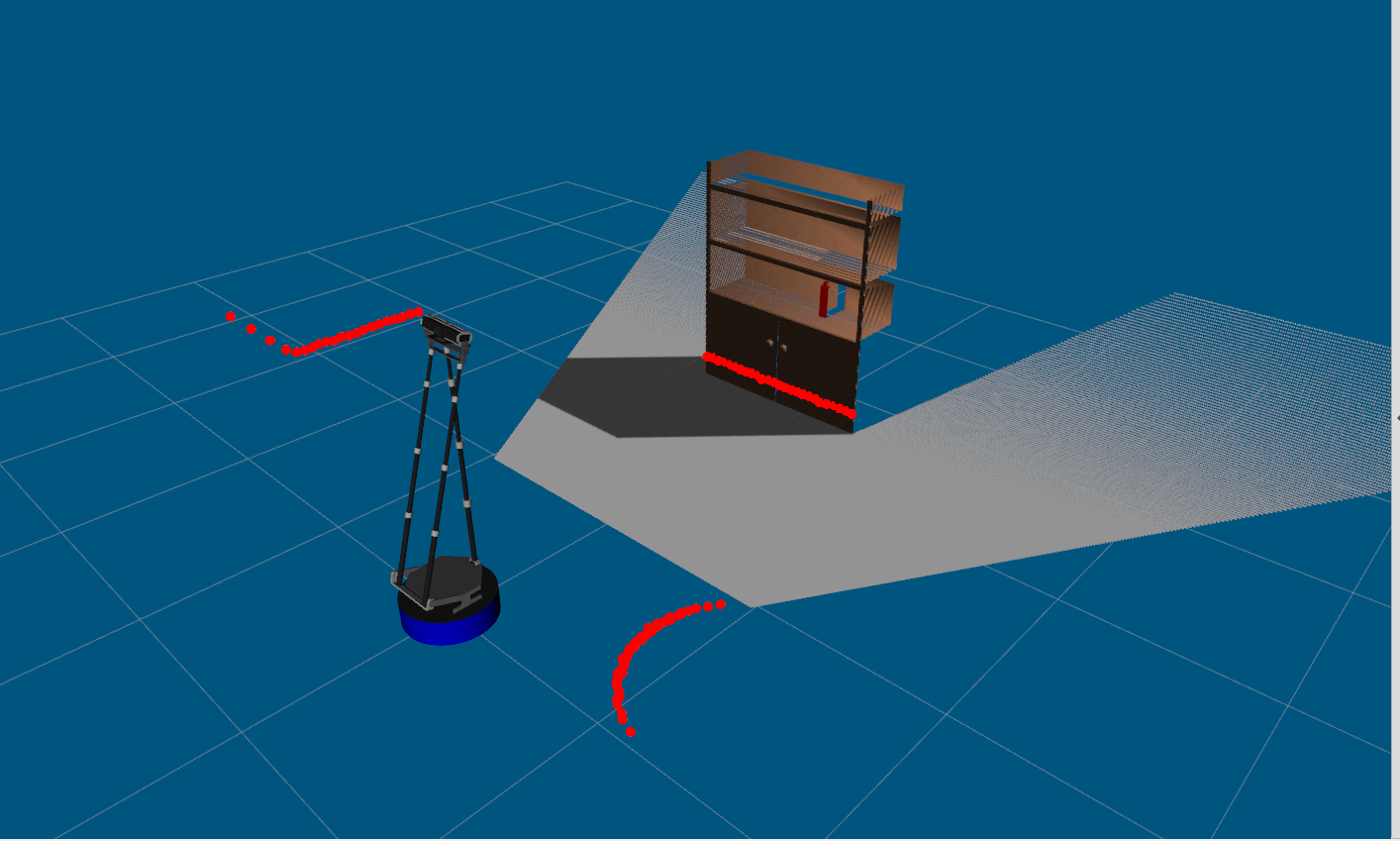
2.保存配置文件,下次在rviz界面打开配置文件