内容包括:
python通过SVM+SIFT实现墙体裂缝检测
107python通过SVM+SIFT实现墙体裂缝检测_哔哩哔哩_bilibili

该代码使用python语言编写,代码实现了一个基于 SVM(支持向量机) 和 SIFT(尺度不变特征变换) 特征的裂缝检测系统。具体来说,分为两个部分:训练部分和检测部分。
训练部分:
- 加载图像:load_images 函数从指定文件夹加载图像,并为每张图像分配标签(1表示有裂缝,0表示无裂缝)。
- 提取SIFT特征:extract_sift_features 使用 cv2.SIFT_create() 提取每张图像的 SIFT 特征(关键点和描述符)。
- 特征填充:由于每张图像的描述符数量不同,将描述符填充到相同的最大长度。这样可以使特征矩阵的维度一致,便于后续的训练。
- 数据平衡:选择了最小样本量的正负类别,以确保训练数据的平衡。
- SVM训练:使用 SVC (支持向量机分类器)进行训练,使用的是线性核。训练完成后,模型被保存在指定路径下。
检测部分:
- 加载模型:从保存的路径加载训练好的 SVM 模型。
- 图像预测:在 predict_single_image 函数中,读取待检测图像并提取 SIFT 特征。之后,将特征填充到相同的维度,并进行预测。预测结果为 1(表示有裂缝)或 0(表示无裂缝)。
- 预测结果:根据模型的输出,打印裂缝存在与否的结果。
基于python的hog+svm实现混凝土裂缝目标检测
052基于python的hog+svm实现混凝土裂缝目标检测_哔哩哔哩_bilibili

该代码使用python语言编写,利用 HOG 特征和 SVM 分类器,通过滑动窗口和金字塔缩放等方法,对图像进行裂缝检测。训练阶段提取的特征通过支持向量机进行分类,而预测阶段则对新的输入图像进行裂缝位置识别,并通过图像显示出检测到的裂缝区域。
基于svm+hog机器学习的行人检测
040基于svm+hog机器学习的行人检测_哔哩哔哩_bilibili

该代码使用python语言编写,利用 HOG 特征和 SVM 分类器,通过滑动窗口和金字塔缩放等方法,对图像进行行人检测。训练阶段提取的特征通过支持向量机进行分类,而预测阶段则对新的输入图像进行行人位置识别,并通过图像显示出检测到的行人区域。
基于传统检测算法hog+svm实现图像分类
005基于传统检测算法hog+svm实现图像多分类_哔哩哔哩_bilibili

基于传统检测算法hog+svm实现目标检测
004基于传统检测算法hog+svm实现目标检测_哔哩哔哩_bilibili
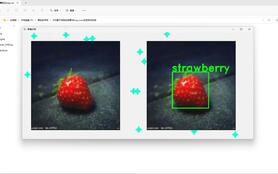
该代码使用python语言编写,利用 HOG 特征和 SVM 分类器,通过滑动窗口和金字塔缩放等方法,对图像进行草莓检测。训练阶段提取的特征通过支持向量机进行分类,而预测阶段则对新的输入图像进行草莓位置识别,并通过图像显示出检测到的草莓区域。