🧑 博主简介:曾任某智慧城市类企业
算法总监,目前在美国市场的物流公司从事高级算法工程师一职,深耕人工智能领域,精通python数据挖掘、可视化、机器学习等,发表过AI相关的专利并多次在AI类比赛中获奖。CSDN人工智能领域的优质创作者,提供AI相关的技术咨询、项目开发和个性化解决方案等服务,如有需要请站内私信或者联系任意文章底部的的VX名片(ID:xf982831907)
💬 博主粉丝群介绍:① 群内初中生、高中生、本科生、研究生、博士生遍布,可互相学习,交流困惑。② 热榜top10的常客也在群里,也有数不清的万粉大佬,可以交流写作技巧,上榜经验,涨粉秘籍。③ 群内也有职场精英,大厂大佬,可交流技术、面试、找工作的经验。④ 进群免费赠送写作秘籍一份,助你由写作小白晋升为创作大佬。⑤ 进群赠送CSDN评论防封脚本,送真活跃粉丝,助你提升文章热度。有兴趣的加文末联系方式,备注自己的CSDN昵称,拉你进群,互相学习共同进步。

@TOC
一、引言
在目标检测中,NMS是提升模型性能的关键后处理技术,但90%的初学者对其实现原理理解不足。本文将彻底解密NMS的工作原理,并提供可直接运行的Python代码,让你真正掌握这一核心技能!
二、为什么需要非极大值抑制(NMS)?
目标检测模型在处理图像时,往往会对同一个目标产生多个重叠的预测框。如下图所示:

图片来源于:https://blog.csdn.net/weixin_62264287/article/details/133936328
这些重叠框会导致:
- 重复检测:同一目标被多次识别
- 结果冗余:输出包含大量无效预测
- 性能下降:影响后续处理效率
非极大值抑制(Non-Maximum Suppression, NMS) 正是为了解决这一问题而诞生。它像一位"裁判",从众多候选框中选出最合适的一个,淘汰冗余预测。
三、NMS核心原理揭秘
3.1 NMS工作原理四步曲
- 排序候选框:将所有预测框按置信度(confidence score)从高到低排序
- 选择最高分:选取置信度最高的框作为保留框
- 计算IOU:计算该保留框与剩余所有框的IOU
- 剔除重叠框:删除IOU超过阈值的框(通常阈值设为0.5)
重复步骤2-4,直到所有框都被处理完毕。整个过程如下图所示:

四、Python实现NMS算法
下面我们实现一个完整的NMS算法,并可视化处理效果:
python
import numpy as np
import cv2
import matplotlib.pyplot as plt
import matplotlib.patches as patches
def nms(boxes, scores, threshold=0.5):
"""
非极大值抑制(NMS)实现
参数:
boxes: 边界框列表 [x1, y1, x2, y2]
scores: 每个框的置信度
threshold: IOU阈值
返回:
保留的框索引列表
"""
# 如果没有框,直接返回空列表
if len(boxes) == 0:
return []
# 将框坐标转换为float类型
boxes = np.array(boxes, dtype=np.float32)
# 获取框的坐标
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
# 计算每个框的面积
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
# 按置信度降序排序
idxs = np.argsort(scores)
# 初始化保留列表
keep = []
while len(idxs) > 0:
# 取出当前置信度最高的框
last = len(idxs) - 1
i = idxs[last]
keep.append(i)
# 计算当前框与其他框的IOU
xx1 = np.maximum(x1[i], x1[idxs[:last]])
yy1 = np.maximum(y1[i], y1[idxs[:last]])
xx2 = np.minimum(x2[i], x2[idxs[:last]])
yy2 = np.minimum(y2[i], y2[idxs[:last]])
# 计算交集区域的宽和高
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
# 计算IOU
intersection = w * h
iou = intersection / (areas[i] + areas[idxs[:last]] - intersection)
# 删除IOU大于阈值的框
delete_idxs = np.where(iou > threshold)[0]
idxs = np.delete(idxs, np.concatenate(([last], delete_idxs)))
return keep
def visualize_boxes(image, boxes, scores, title, color='r'):
"""可视化边界框"""
plt.figure(figsize=(10, 6))
plt.imshow(image)
ax = plt.gca()
for i, box in enumerate(boxes):
x1, y1, x2, y2 = box
rect = patches.Rectangle(
(x1, y1), x2-x1, y2-y1,
linewidth=2, edgecolor=color, facecolor='none'
)
ax.add_patch(rect)
plt.text(
x1, y1-10, f'{scores[i]:.2f}',
fontsize=10, color='white',
bbox=dict(facecolor=color, alpha=0.8)
)
plt.title(title)
plt.axis('off')
plt.show()
# 创建模拟图像
image = np.ones((400, 600, 3), dtype=np.uint8) * 255
cv2.putText(image, 'Target Detection', (150, 200),
cv2.FONT_HERSHEY_SIMPLEX, 2, (0, 0, 0), 3)
# 模拟检测结果 (格式: [x1, y1, x2, y2])
boxes = [
[100, 100, 300, 300], # 高置信度
[120, 120, 320, 320], # 与第一个高度重叠
[150, 150, 350, 350], # 与第一个高度重叠
[400, 150, 550, 350], # 不同位置
[380, 130, 530, 330], # 与第四个重叠
[420, 170, 570, 370] # 与第四个重叠
]
# 对应的置信度
scores = [0.95, 0.90, 0.85, 0.92, 0.88, 0.80]
# 可视化原始检测结果
visualize_boxes(image, boxes, scores, '原始检测结果 (NMS前)', color='r')
# 应用NMS
keep = nms(boxes, scores, threshold=0.5)
# 筛选保留的框
nms_boxes = [boxes[i] for i in keep]
nms_scores = [scores[i] for i in keep]
# 可视化NMS后的结果
visualize_boxes(image, nms_boxes, nms_scores, 'NMS处理后的结果', color='g')五、代码解析与运行结果
5.1 核心函数解析
-
nms函数:- 输入:边界框列表、置信度列表、IOU阈值
- 处理流程:
- 按置信度排序
- 循环处理每个框
- 计算当前框与其他框的IOU
- 删除IOU超过阈值的框
- 输出:保留框的索引列表
-
visualize_boxes函数:- 功能:在图像上绘制边界框和置信度
- 参数:图像、框列表、置信度列表、标题、颜色
5.2 运行效果展示
运行上述代码,你将看到两个对比图像:
NMS前:

- 红色框表示原始检测结果
- 同一目标有多个重叠框
NMS后:
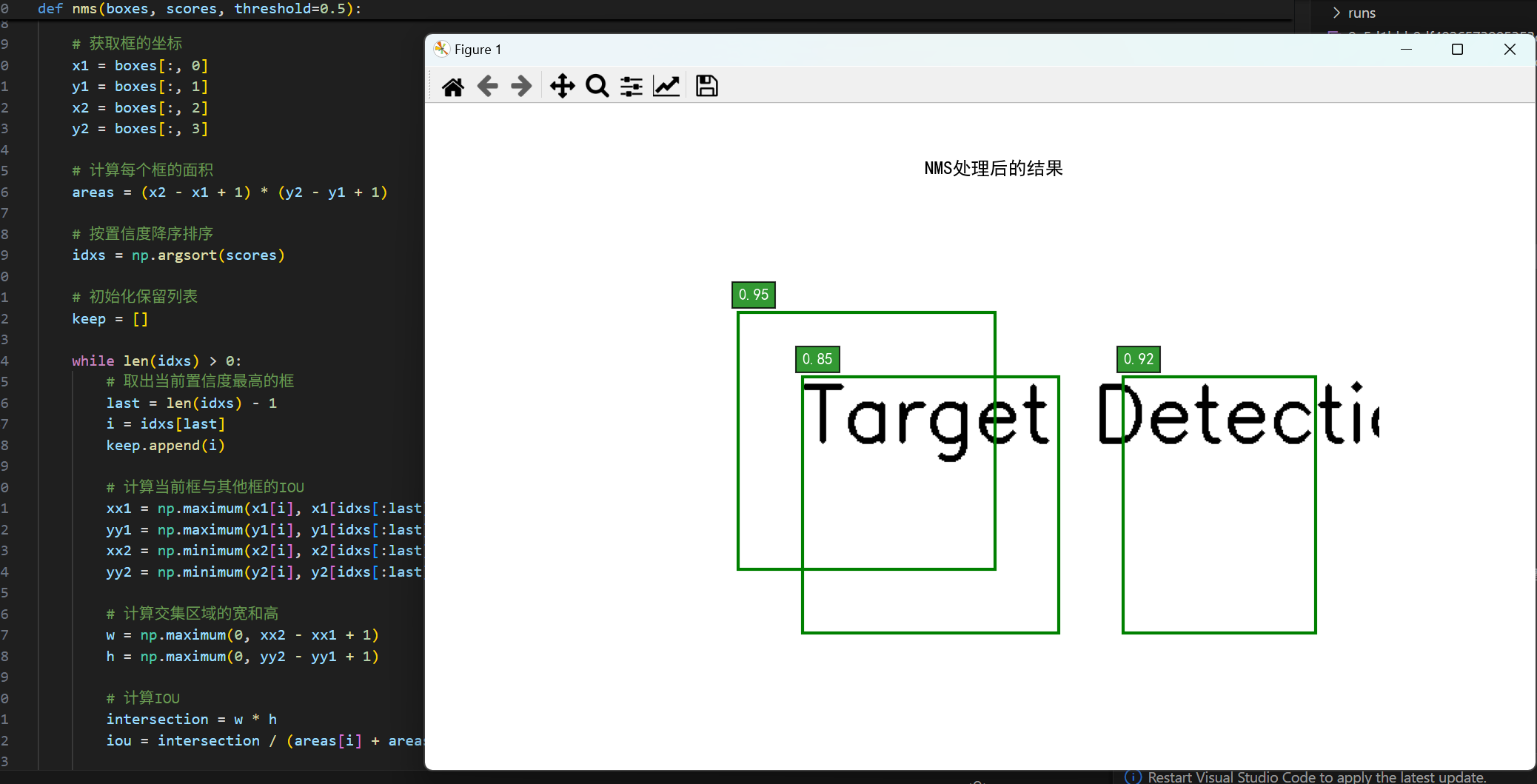
- 绿色框表示NMS处理后的结果
六、NMS的进阶应用与优化
6.1 软性NMS(Soft-NMS)
传统NMS直接删除重叠框,可能导致以下问题:
- 密集目标漏检
- 阈值设置敏感
软性NMS的改进方案:
python
# 在NMS循环中替换删除操作
for j in delete_idxs:
# 根据IOU降低置信度,而不是直接删除
scores[j] = scores[j] * (1 - iou[j])6.2 多类别NMS处理
当处理多类别检测时,需要:
python
# 按类别分组处理
for class_id in unique_classes:
class_indices = np.where(class_ids == class_id)[0]
class_boxes = boxes[class_indices]
class_scores = scores[class_indices]
keep_indices = nms(class_boxes, class_scores)
# 合并各类别结果6.3 其他改进方法
| 方法 | 核心思想 | 适用场景 |
|---|---|---|
| Weighted NMS | 加权融合重叠框 | 需要更精确位置 |
| Adaptive NMS | 动态调整阈值 | 密集目标检测 |
| DIoU NMS | 考虑中心点距离 | 解决边界框错位 |
七、NMS在实际项目中的应用技巧
7.1 阈值选择策略
- 通用目标:0.5-0.7
- 密集小目标:0.3-0.5
- 大目标/精确检测:0.7-0.9
7.2 性能优化技巧
python
# 向量化加速
def vectorized_nms(boxes, scores, threshold):
# 使用矩阵运算代替循环
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
# 向量化计算IOU
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
iou = inter / (areas[i] + areas[order[1:]] - inter)
# 向量化索引
inds = np.where(iou <= threshold)[0]
order = order[inds + 1]
return keep八、总结与思考
NMS作为目标检测中不可或缺的后处理步骤,其重要性不言而喻。通过本文的学习,你应该掌握:
- NMS的核心原理和工作流程
- NMS的Python实现方法
- NMS的优化技巧和变体
- 实际应用中的参数调整策略
关键思考:当两个目标非常接近时,传统NMS可能导致其中一个被错误抑制。如何解决这个问题?
答案:可以尝试以下方法:
- 使用Soft-NMS替代传统NMS
- 降低IOU阈值(如0.3)
- 增加位置权重(如DIoU-NMS)
- 调整模型锚框设计
九、附录:完整项目代码
获取NMS和可视化功能的完整代码:
https://gitee.com/zhang-xufang/object_detection_demo/blob/master/NMS.py
觉得本文有帮助?点击👍支持!如果有任何问题或建议,欢迎在评论区留言讨论~