面向多模态感知与反思的智能体架构Agentic AI的实践路径与挑战
引言:从静态智能体到 Agentic AI 的演化
随着人工智能的发展,传统基于单智能体被动响应的模型正逐步让位于具备主动规划、自主目标管理和交互协作能力的Agentic AI(能动智能体)架构。Agentic AI 代表了一种新范式,其目标是构建具备"自治、反思、协作"能力的系统,广泛应用于自动编程、游戏AI、多机器人协作、自动交易等场景。
本篇文章将全面分析Agentic AI架构,从系统组成、核心模块、决策机制、到代码实现,揭示多智能体如何共同达成复杂任务。
Agentic AI 架构组成
系统模块概览
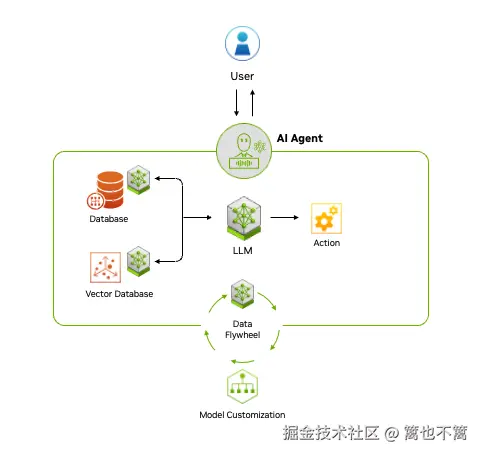
一个典型的Agentic AI系统由以下五大核心模块组成:
- 感知模块(Perception Module):采集环境信息
- 记忆模块(Memory Module):存储并检索历史经验
- 意图识别模块(Intent Recognition):理解当前目标或生成自主目标
- 决策引擎(Planner / Decision Maker):规划执行路径
- 执行与通信模块(Actuator + Communicator):执行动作、协调协作
架构示意图
markdown
┌────────────┐
│ 外部环境 │
└────┬───────┘
▼
┌────────────┐
│ 感知模块 │<──────────────────┐
└────┬───────┘ │
▼ │
┌────────────┐ │
│ 记忆模块 │◄────┐ │
└────┬───────┘ │ │
▼ │ │
┌────────────┐ │ │
│ 意图识别 │─────┘ │
└────┬───────┘ │
▼ │
┌────────────┐ │
│ 决策引擎 │──────────────────┘
└────┬───────┘
▼
┌────────────┐
│ 执行/通信 │
└────────────┘多智能体系统中的交互机制
协作还是竞争?策略决定关系
在多智能体环境中,智能体之间可以是合作型(Cooperative) 、竞争型(Competitive),或**混合型(Mixed)**关系。实现这些关系的关键是使用多智能体强化学习(MARL)策略或基于规则的推理系统。
通信协议设计:Agent-to-Agent Communication
多智能体之间的通信可以使用如下技术:
- JSON/RPC + WebSocket 或 HTTP
- 自定义 DSL(Domain Specific Language)
- LLM + 意图解析结构化协议(如Plan-Action格式)
自主决策核心:Planning + Reasoning
1. 意图识别(Intent Recognition)
我们可以基于 LLM 模拟一个自主意图识别模块:
python
from transformers import pipeline
intent_pipeline = pipeline("text-classification", model="facebook/bart-large-mnli")
query = "I want to explore the nearby area and gather resources"
labels = ["exploration", "combat", "trading", "idle"]
intent = intent_pipeline(query, candidate_labels=labels)
print("识别出的意图:", intent[0]['label'])输出:
识别出的意图:exploration2. 规划模块(Planner)
使用经典的层次化任务网络(HTN)规划或基于语言模型生成计划:
python
import openai
def generate_plan(goal: str, context: str):
prompt = f"""
你是一位AI智能体,现在你的目标是:{goal}。
已知当前环境:{context}
请你输出一个三步的计划来完成目标。
"""
response = openai.ChatCompletion.create(
model="gpt-4",
messages=[{"role": "user", "content": prompt}]
)
return response['choices'][0]['message']['content']
plan = generate_plan("探索周围环境", "你在一个充满未知的区域,携带一架无人机和一台传感器。")
print(plan)输出示例:
markdown
1. 启动无人机进行高空扫描,识别地形与可能资源点;
2. 根据扫描结果制定路径,避开危险区域;
3. 使用传感器采集重点区域数据并回传。3. 执行模块(Executor)
我们用一个异步调度执行器模拟执行每个子任务:
python
import asyncio
async def execute_task(task):
print(f"正在执行任务: {task}")
await asyncio.sleep(1)
print(f"完成任务: {task}")
async def execute_plan(tasks):
for task in tasks:
await execute_task(task)
tasks = [
"扫描区域",
"规划路径",
"采集资源"
]
asyncio.run(execute_plan(tasks))多智能体协作示例:简易模拟系统
多个Agent的注册与调度机制
以下代码模拟了一个基本的注册调度器,让多个Agent注册后并发执行:
python
class Agent:
def __init__(self, name):
self.name = name
async def act(self, goal):
print(f"[{self.name}] 接收到目标:{goal}")
await asyncio.sleep(1)
print(f"[{self.name}] 完成目标:{goal}")
class Scheduler:
def __init__(self):
self.agents = []
def register(self, agent):
self.agents.append(agent)
async def assign_task(self, goal):
tasks = [agent.act(goal) for agent in self.agents]
await asyncio.gather(*tasks)
# 测试运行
agent1 = Agent("Agent-A")
agent2 = Agent("Agent-B")
scheduler = Scheduler()
scheduler.register(agent1)
scheduler.register(agent2)
asyncio.run(scheduler.assign_task("探索区域"))
架构优势与挑战
优势
- 自主性强:无需频繁人类干预
- 可拓展性:支持大规模 Agent 并行工作
- 适应性高:可通过在线学习不断调整策略
挑战
- 多智能体通信复杂性:需设计高效协议
- 冲突管理机制不足:需引入博弈或仲裁机制
- 长期记忆与反思能力弱:需引入 LLM 记忆检索、RAG等技术
Agentic AI 的未来图景
Agentic AI 是实现真正智能自治系统的重要方向,它代表着从被动智能走向主动智能的跃迁。未来的发展趋势可能包括:
- 引入长期记忆 + RAG 模型
- 使用 LoRA / fine-tuned LLM 实现个性化智能体
- 多模态输入支持(图像、语音、感知)
我们正站在一个关键的转折点,Agentic AI 不再是研究室中的实验品,而正在一步步走进现实世界的复杂场景中。 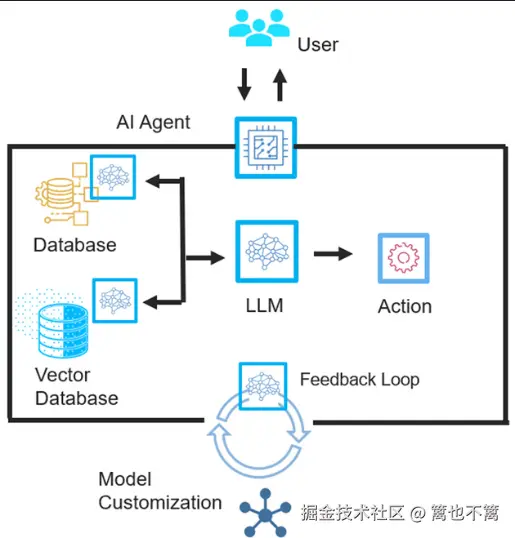
总结
本文以系统性地介绍了Agentic AI(能动智能体)的核心理念、系统架构、关键模块与技术实现方式。文章重点涵盖:
五大核心模块:感知、记忆、意图识别、决策规划、执行通信;
多智能体协作机制:任务分配、通信协议、并行执行;
关键技术与代码实现:包括意图识别(LLM)、任务规划(自然语言规划生成)、任务执行(异步调度);
架构优势与挑战:如自主性强、适应性高,但通信复杂、冲突协调难度大。
通过实际Python代码演示,文章不仅揭示了Agentic AI在智能化协同任务执行中的强大潜力,也明确指出了未来发展方向,如引入长期记忆机制、引导式学习、RAG与LoRA集成等。
该框架为构建下一代通用智能系统提供了理论基础与实践路径,具有重要研究价值和应用前景。