YOLO 模型训练是核心执行环节,这一步是把前期的数据集、配置文件落地成可用模型的关键,我会从数据增强(怎么让模型学得更好)、训练流程(一步步落地)、监控指标(怎么判断训练效果) 三个维度,给出可直接操作的指南(以 YOLOv8 为例,v5 通用)。
一、数据增强:让模型 "见多识广"(避免过拟合)
数据增强是通过对图片做随机变换,生成更多 "新样本",核心是提升模型的泛化能力,YOLOv8 已内置全套增强策略,无需手动实现,只需通过参数控制开关 / 强度。
1. 核心增强策略(分类 + 作用)
| 增强类型 | 作用 | 控制参数 | 调整建议 |
|---|---|---|---|
| 几何增强 | 适配目标不同角度 / 尺度 | - scale(缩放) - flipud(上下翻转) - fliplr(左右翻转) - rotate(旋转) |
通用场景:默认值即可; 小目标:降低rotate(避免小目标失真); 方向敏感目标(如文字):关闭flipud; |
| 像素增强 | 适配不同光照 / 色彩环境 | - hsv_h(色调) - hsv_s(饱和度) - hsv_v(明度) |
户外场景:调高hsv_v(±0.5); 低光场景:调高hsv_s(±0.8); |
| 高级增强 | 提升复杂场景鲁棒性 | - mosaic(马赛克) - mixup(混合) - copy_paste(复制粘贴) |
小目标 / 密集场景:mosaic=0.5-0.7(避免目标被切割); 小数据集:mixup=0.1-0.3(增加样本多样性); 稀疏目标:copy_paste=0.2(提升目标密度) |
2. 增强参数设置(命令行 / 配置文件)
方式 1:命令行快速设置
python
# 小目标场景增强示例
yolo detect train \
data=data.yaml \
model=yolov8s.pt \
mosaic=0.6 # 降低马赛克增强
mixup=0.1 # 轻度混合增强
scale=0.5 # 缩放范围±50%
hsv_v=0.6 # 提高明度增强,适配低光小目标方式 2:配置文件集中设置(推荐)
在自定义train_config.yaml中添加:
python
# 数据增强核心参数
mosaic: 0.6
mixup: 0.1
copy_paste: 0.0
hsv_h: 0.015 # 色调增强(默认)
hsv_s: 0.7 # 饱和度增强(默认)
hsv_v: 0.6 # 明度增强(调高)
scale: 0.5 # 缩放范围
perspective: 0.001 # 透视变换(小目标关闭/调低)
flipud: 0.0 # 关闭上下翻转(小目标方向固定)
fliplr: 0.5 # 保留左右翻转3. 增强避坑原则
- 不要 "过度增强":比如马赛克设为 1.0+mixup=0.5,会导致目标特征模糊,反而降低精度;
- 目标有 "方向 / 形态约束" 时(如人脸、文字),关闭上下翻转、大角度旋转;
- 小数据集(<500 张)优先开 mixup/copy_paste,大数据集(>5000 张)默认增强即可。
二、训练流程:标准化执行(从启动到结束)
YOLO 训练是端到端的自动化流程,但需按步骤验证每一环,避免训练中途出错或结果无效。
1. 完整训练流程(6 步)
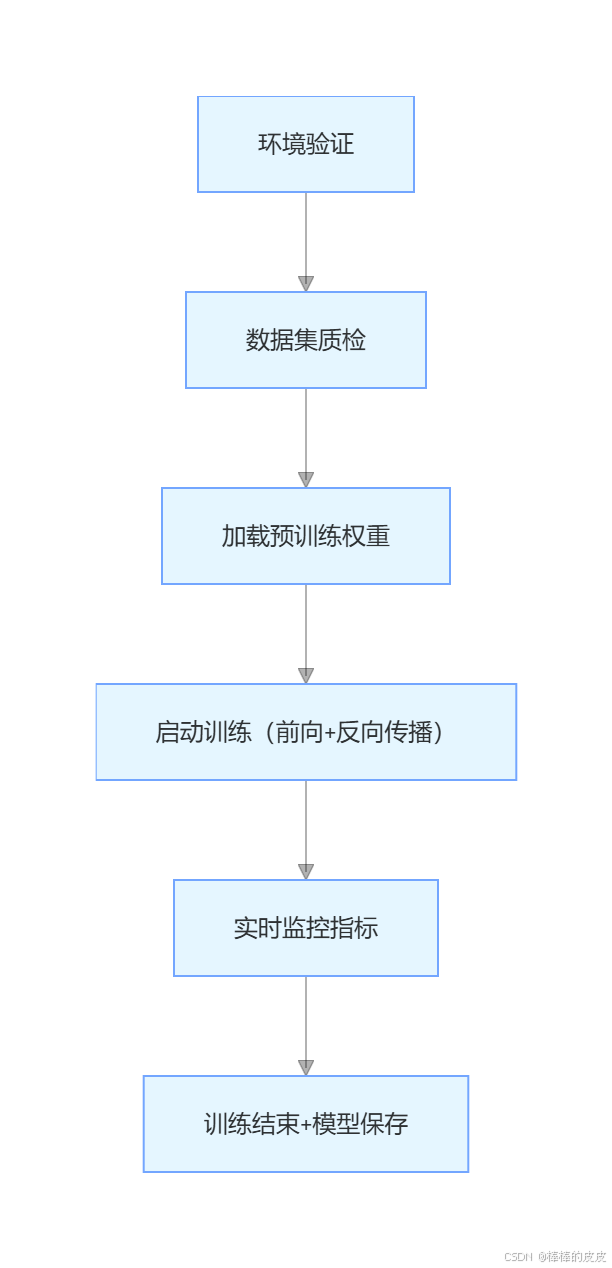
步骤 1:环境验证(训练前必做)
确保硬件、依赖、数据集路径无问题:
python
# 1. 验证GPU/CUDA
python -c "import torch; print('CUDA可用:', torch.cuda.is_available())"
# 2. 验证数据集配置
yolo checks data=data.yaml
# 3. 验证模型加载
from ultralytics import YOLO
model = YOLO("yolov8s.pt") # 无报错则加载成功步骤 2:数据集质检(避免标注错误导致训练失败)
用 YOLO 自带工具检查:
python
yolo data check data.yaml # 检查标注格式、缺失文件、异常值步骤 3:启动训练(核心命令)
python
# 基础训练命令(整合配置文件+增强参数)
yolo detect train \
data=data.yaml \
model=yolov8s.pt \
cfg=train_config.yaml \ # 自定义配置文件
epochs=80 \
batch=16 \
imgsz=640 \
device=0 # 指定GPU(多卡用device=0,1)步骤 4:训练过程核心逻辑(理解即可)
python
1. 加载预训练权重:初始化模型参数,避免从零训练(迁移学习);
2. 数据加载+增强:按batch读取图片,实时做增强变换;
3. 前向传播:模型预测目标框、类别、置信度;
4. 损失计算:对比预测值与真实标注,计算坐标/置信度/类别损失;
5. 反向传播:根据损失调整模型参数(优化器更新权重);
6. 验证集评估:每轮训练后,用验证集计算精度、mAP等指标;
7. 早停/保存:验证集精度不涨则早停,保存最优权重(best.pt)。步骤 5:训练中断处理(实用技巧)
- 意外中断:重新运行训练命令,YOLO 会自动加载
runs/detect/train/weights/last.pt,从断点继续训练; - 手动停止:按
Ctrl+C,YOLO 会保存last.pt和当前最优的best.pt。
步骤 6:训练结果保存(关键文件)
训练完成后,runs/detect/train/目录下的核心文件:
python
train/
├── weights/
│ ├── best.pt # 验证集mAP最高的权重(核心,部署用)
│ └── last.pt # 最后一轮训练的权重(继续训练用)
├── results.csv # 所有监控指标的数值记录(可绘图)
├── confusion_matrix.png # 混淆矩阵(看类别分类错误)
├── val_batch0_pred.jpg # 验证集预测可视化(看检测效果)
└── args.yaml # 本次训练的所有配置参数(复盘用)三、监控指标:判断训练效果(核心看这几个)
训练过程中终端 / 日志会实时输出指标,核心是通过指标判断模型 "是否收敛、是否过拟合、精度是否达标"。
1. 核心监控指标(按优先级排序)
| 指标 | 含义 | 合格标准 | 异常分析 |
|---|---|---|---|
| mAP@0.5 | 交并比 IoU=0.5 时的平均精度均值(核心指标) | 通用场景≥70%; 定制场景≥80% | - 低:数据集少 / 标注差 / 模型规模小; - 训练中持续上升:模型在收敛; - 训练集高、验证集低:过拟合 |
| mAP@0.5:0.95 | IoU 从 0.5 到 0.95 的平均 mAP(严格指标) | 通用场景≥50%; 定制场景≥60% | 低:目标定位不准(锚框 / 坐标损失高) |
| Precision(精度) | 预测为正样本的结果中,真实正样本的比例 | ≥80% | 低:误检多(如把背景识别为目标)→ 调高 conf_thres |
| Recall(召回率) | 真实正样本中,被模型检测出来的比例 | ≥80% | 低:漏检多(如小目标没检测到)→ 调低 conf_thres / 优化锚框 |
| Loss(损失) | 预测值与真实值的误差(分 box/obj/cls) | - 训练集 loss:持续下降至平稳; - 验证集 loss:与训练集 loss 接近 | - 训练集 loss 不降:学习率太高 / 数据集有问题; - 验证集 loss 远高于训练集:过拟合 |
| FPS | 每秒推理图片数(速度指标) | 实时场景≥30;非实时≥10 | 低:模型规模大 / 输入尺寸大→ 换小模型 / 减小 imgsz |
2. 指标监控实操
方式 1:终端实时查看
训练时终端会按轮次输出关键指标,示例:
python
Epoch GPU_mem box_loss obj_loss cls_loss Precision Recall mAP@0.5 mAP@0.5:0.95
50/80 4.2G 0.098 0.065 0.012 0.89 0.87 0.91 0.72- 关注:
box_loss/obj_loss/cls_loss持续下降,mAP@0.5持续上升→ 训练正常。
方式 2:可视化分析(更直观)
用 Python 读取results.csv绘制指标曲线:
python
import pandas as pd
import matplotlib.pyplot as plt
# 读取结果文件
df = pd.read_csv("runs/detect/train/results.csv")
# 设置中文字体(避免乱码)
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 绘制损失曲线
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.plot(df['epoch'], df['train/box_loss'], label='训练集box损失')
plt.plot(df['epoch'], df['val/box_loss'], label='验证集box损失')
plt.xlabel('轮次')
plt.ylabel('损失值')
plt.title('坐标损失曲线')
plt.legend()
# 绘制mAP曲线
plt.subplot(1, 2, 2)
plt.plot(df['epoch'], df['metrics/mAP50'], label='mAP@0.5')
plt.plot(df['epoch'], df['metrics/mAP50-95'], label='mAP@0.5:0.95')
plt.xlabel('轮次')
plt.ylabel('mAP值')
plt.title('精度曲线')
plt.legend()
plt.tight_layout()
plt.savefig('train_metrics.png')
plt.show()3. 常见指标异常及解决办法
| 异常现象 | 原因 | 解决办法 |
|---|---|---|
| mAP@0.5 训练集高、验证集低 | 过拟合 | 1. 增加 weight_decay;2. 开启 dropout;3. 增加数据增强;4. 减少 epochs |
| loss 持续震荡,不下降 | 学习率过高 / 批次太小 | 1. 降低 lr0(如从 0.01→0.005);2. 增大 batch size(或开启 accumulate=2);3. 检查数据集标注是否混乱 |
| Recall 低(漏检多) | 小目标多 / 锚框不匹配 / 置信度阈值高 | 1. 自动聚类锚框(anchor=auto);2. 增大 imgsz;3. 调低 conf_thres;4. 降低 mosaic 增强比例 |
| Precision 低(误检多) | 置信度阈值低 / 背景复杂 | 1. 调高 conf_thres;2. 增加背景样本;3. 优化类别损失权重 |
总结
核心要点回顾
- 数据增强:按需调整,小目标降马赛克、小数据集开 mixup,避免过度增强;
- 训练流程 :先验证环境 / 数据集,启动训练后关注断点续训,重点保存
best.pt; - 监控指标 :核心看
mAP@0.5和损失曲线,过拟合调正则化、漏检调锚框 / 置信度。