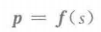
机器人轨迹规划中的"几何基元"指的是用于构建机器人期望路径(Path)的基本几何元素。它们是路径规划的基础构件,最终生成的轨迹(Trajectory)会赋予这些几何路径时间信息和运动约束(速度、加速度等)。
几何基元的核心是提供 "可复用的基础路径模块",通过拼接这些模块(需保证连续性,如位置、速度、加速度连续),可快速构建复杂轨迹,同时简化规划难度(无需直接设计全局复杂路径)。
直线路径:

圆形路径:




机器人轨迹规划中的"几何基元"指的是用于构建机器人期望路径(Path)的基本几何元素。它们是路径规划的基础构件,最终生成的轨迹(Trajectory)会赋予这些几何路径时间信息和运动约束(速度、加速度等)。
几何基元的核心是提供 "可复用的基础路径模块",通过拼接这些模块(需保证连续性,如位置、速度、加速度连续),可快速构建复杂轨迹,同时简化规划难度(无需直接设计全局复杂路径)。
直线路径:
圆形路径: