代码总览
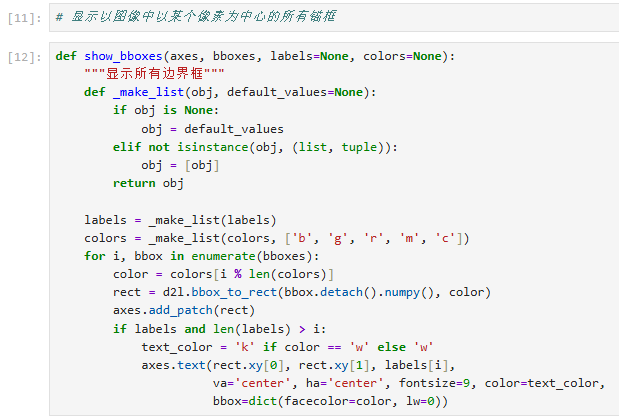
代码解释
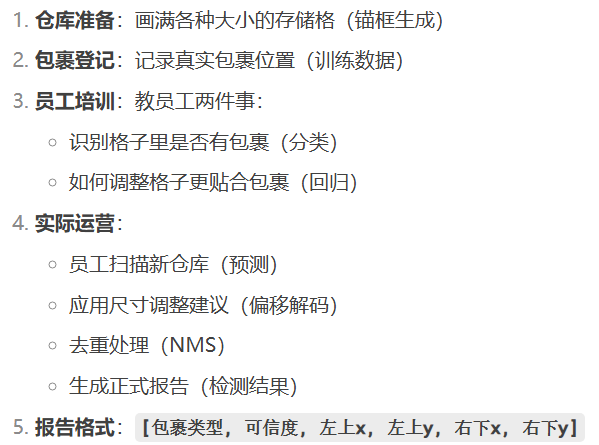
从头到尾用"快递站管理系统"的比喻方式,完整解释每一行代码的功能和意义。
1. 导入库 - 准备工具包
python
import torch # 📦 主工具箱:搬运工(张量操作)
from d21 import torch as d21 # 📦 专用工具包:快递站定制工具(边界框转换等)
python
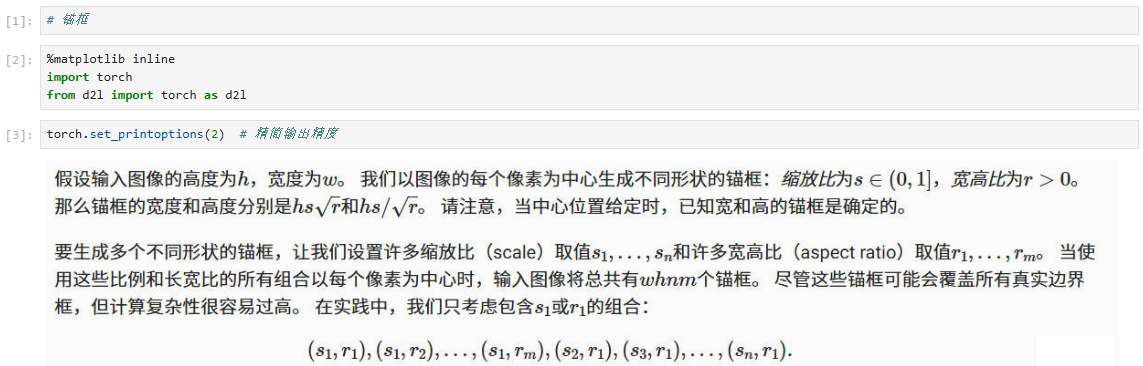
torch.set_printoptions(2) # 📏 设置测量精度:小数点后2位
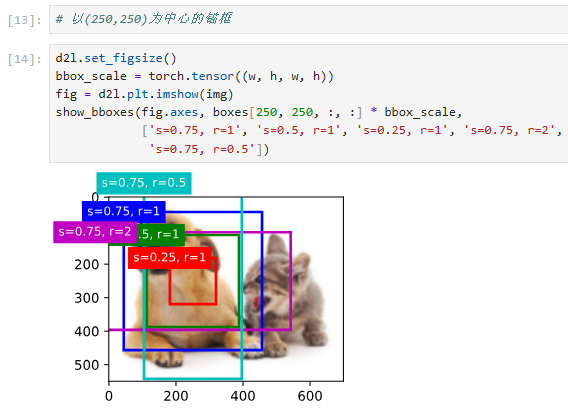
2. 锚框生成 - 布置仓库货架
python
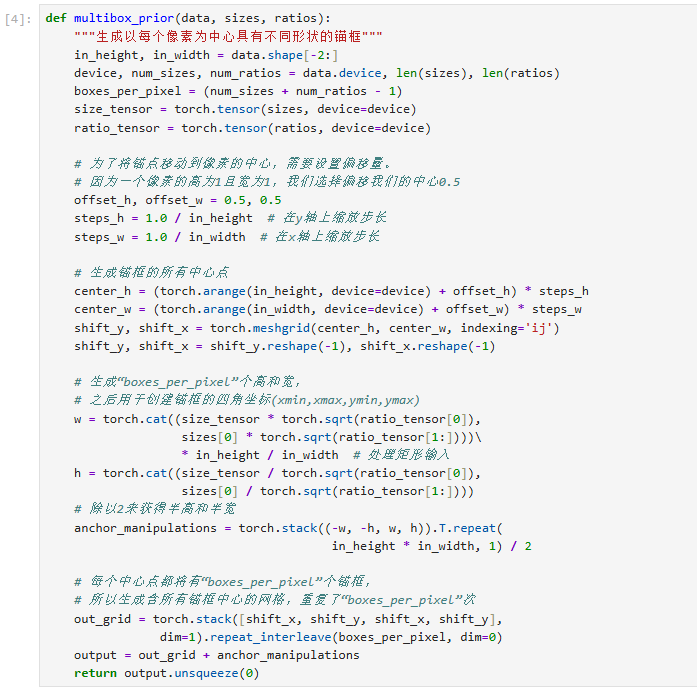
def multisourceplot(data, sizes, ratios):
# 📏 测量仓库尺寸
in_height, in_width = data.shape[-2:] # 获取仓库的长宽
# 🧰 准备工具
device = data.device # 确定使用哪种搬运车(CPU/GPU)
num_sizes, num_ratios = len(sizes), len(ratios) # 清点盒子类型
# 📐 计算每个位置放几个盒子
boxes_per_pixel = (num_sizes + num_ratios - 1) # 每位置放4个盒子
# 📦 准备盒子模板
size_tensor = torch.tensor(sizes, device=device) # 小/中/大三种盒子
ratio_tensor = torch.tensor(ratios, device=device) # 方形/长方形模板
# 📍 确定每个格子的中心点
offset_h, offset_w = 0.5, 0.5 # 从格子角落往中心走0.5步
steps_h = 1.0 / in_height # 纵向每步距离
steps_w = 1.0 / in_width # 横向每步距离
# 🗺️ 创建坐标网格
center_h = (torch.arange(in_height, device=device) + offset_h) * steps_h
center_w = (torch.arange(in_width, device=device) + offset_w) * steps_w
shift_y, shift_x = torch.meshgrid(center_h, center_w, indexing='ij')
shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1) # 压平网格
# 📏 计算每种盒子的实际尺寸
# 第一类:固定形状,不同大小
w1 = size_tensor * torch.sqrt(ratio_tensor[0])
h1 = size_tensor / torch.sqrt(ratio_tensor[0])
# 第二类:固定大小,不同形状
w2 = sizes[0] * torch.sqrt(ratio_tensor[1:])
h2 = sizes[0] / torch.sqrt(ratio_tensor[1:])
# 📦 合并所有盒子尺寸
w = torch.cat((w1, w2))
h = torch.cat((h1, h2))
# 🧩 组装盒子位置偏移量
anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(
in_height * in_width, 1) / 2 # 计算每个盒子四角偏移
# 🗺️ 为每个位置分配中心点
out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],
dim=1).repeat_interleave(boxes_per_pixel, dim=0)
# 📌 最终确定每个盒子位置
output = out_grid + anchor_manipulations # 中心点 + 偏移量
return output.unsqueeze(0) # 📄 返回货架布置图(添加批次维度)
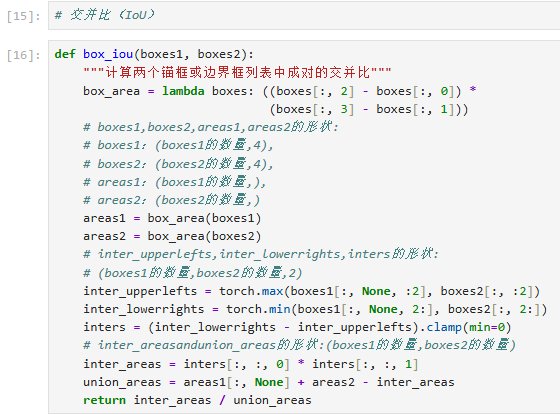
3. IoU计算 - 测量格子重叠率
python
def box_iou(boxes1, boxes2):
# 📏 定义量具:计算格子面积
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) *
(boxes[:, 3] - boxes[:, 1]))
# 📐 测量两组格子各自面积
areas1 = box_area(boxes1) # 第一组格子面积
areas2 = box_area(boxes2) # 第二组格子面积
# 🔍 计算重叠区域
# 左上角取较大值(更靠右下的左上角)
inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])
# 右下角取较小值(更靠左上的右下角)
inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])
# 计算重叠区域尺寸(负数取0)
inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)
# 📏 计算重叠面积
inter_areas = inters[:, :, 0] * inters[:, :, 1]
# 📐 计算总面积
union_areas = areas1[:, None] + areas2 - inter_areas
# ➗ 返回重叠比例
return inter_areas / union_areas
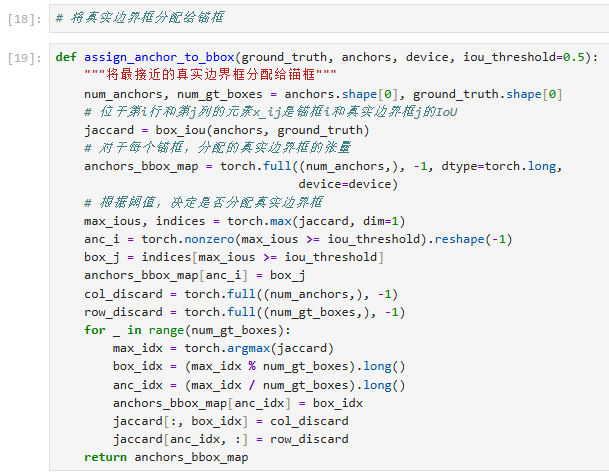
4. 锚框分配 - 给包裹分配存储格
python
def assign_anchor_to_bbox(ground_truth, anchors, device, iou_threshold=0.5):
# 📦 清点资源
num_anchors = anchors.shape[0] # 空盒子数量
num_gt = ground_truth.shape[0] # 包裹数量
# 📊 测量每个空盒与包裹的匹配度
jaccard = box_iou(anchors, ground_truth) # 计算IoU矩阵
# 🏷️ 初始化分配表(-1表示未分配)
anchor_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long, device=device)
# ✅ 第一轮分配:高匹配度直接分配
max_iou, indices = torch.max(jaccard, dim=1) # 每个盒子找最佳匹配
anc_i = torch.nonzero(max_iou >= iou_threshold).reshape(-1) # 找出匹配度高的盒子
box_j = indices[anc_i] # 对应的包裹编号
anchor_bbox_map[anc_i] = box_j # 登记分配关系
# 🔄 第二轮分配:确保每个包裹都有盒子
col_discard = torch.full((num_anchors,), -1) # 列作废标记
row_discard = torch.full((num_gt,), -1) # 行作废标记
for _ in range(num_gt): # 遍历每个包裹
max_idx = torch.argmax(jaccard) # 找全局最佳匹配
box_idx = (max_idx % num_gt).long() # 包裹编号
anc_idx = (max_idx // num_gt).long() # 盒子编号
anchor_bbox_map[anc_idx] = box_idx # 分配盒子
# 🚫 标记已分配的包裹和盒子
jaccard[:, box_idx] = col_discard # 该包裹列作废
jaccard[anc_idx, :] = row_discard # 该盒子行作废
return anchor_bbox_map # 📄 返回分配表
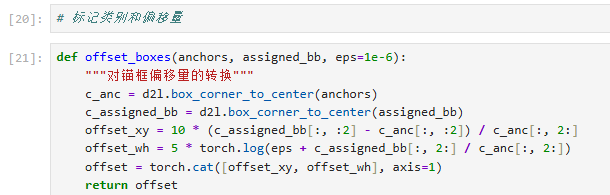
5. 偏移计算 - 记录格子调整量
python
def offset_boxes(anchors, assigned_bb, eps=1e-6):
# 🔄 转换坐标格式:从四角→中心+尺寸
c_anc = d21.box_corner_to_center(anchors) # 格子当前尺寸
c_assigned = d21.box_corner_to_center(assigned_bb) # 包裹实际尺寸
# 📏 计算中心点偏移(带缩放因子)
offset_xy = 10 * (c_assigned[:, :2] - c_anc[:, :2]) / c_anc[:, 2:]
# 📏 计算尺寸缩放量(对数形式更稳定)
offset_wh = 5 * torch.log(eps + c_assigned[:, 2:] / c_anc[:, 2:])
return torch.cat([offset_xy, offset_wh], axis=1) # 📄 返回调整量表
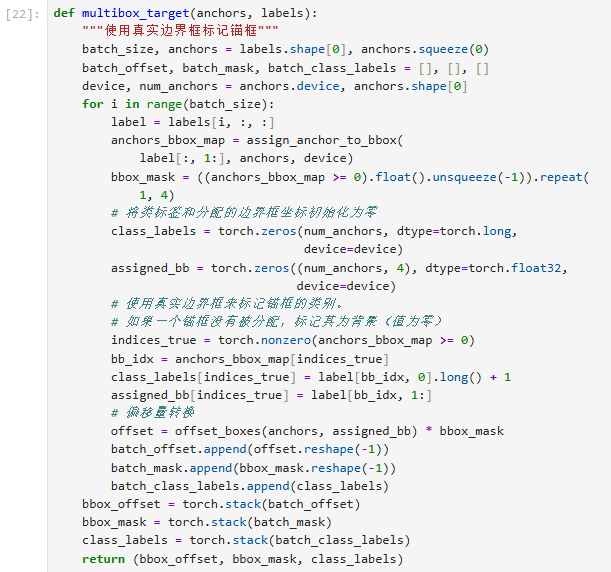
6. 训练标签生成 - 创建员工培训手册
python
def multibox_target(anchors, labels):
# 📦 初始化培训资料
batch_size = labels.shape[0] # 培训包裹批次大小
anchors = anchors.squeeze(0) # 移除批次维度
batch_offset, batch_mask, batch_class_labels = [], [], [] # 三个培训模块
# 🔄 处理每个培训包裹
for i in range(batch_size):
label = labels[i, :, :] # 当前包裹信息
# 🏷️ 分配格子
anchor_bbox_map = assign_anchor_to_bbox(label[:, 1:], anchors, device)
# 🎭 创建格子使用标记
bbox_mask = ((anchor_bbox_map >= 0).float().unsqueeze(-1)).repeat(1, 4)
# 🏷️ 初始化标签
class_labels = torch.zeros(anchors.shape[0], dtype=torch.long, device=device)
assigned_bb = torch.zeros((anchors.shape[0], 4), dtype=torch.float32, device=device)
# ✅ 标记有包裹的格子
indices_true = torch.nonzero(anchor_bbox_map >= 0).flatten()
bb_idx = anchor_bbox_map[indices_true]
class_labels[indices_true] = label[bb_idx, 0].long() + 1 # 类别+1(0留给空)
assigned_bb[indices_true] = label[bb_idx, 1:] # 记录包裹位置
# 📏 计算格子调整量
offset = offset_boxes(anchors, assigned_bb) * bbox_mask
# 📚 收集培训资料
batch_offset.append(offset.reshape(-1))
batch_mask.append(bbox_mask.reshape(-1))
batch_class_labels.append(class_labels)
# 📦 打包培训手册
return (torch.stack(batch_offset),
torch.stack(batch_mask),
torch.stack(batch_class_labels))
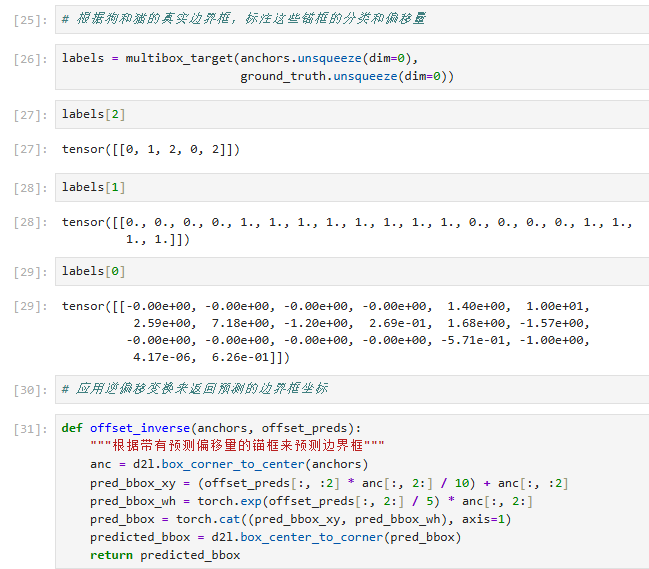
7. 预测解码 - 应用调整建议
python
def offset_inverse(anchors, offset_preds):
# 🔄 转换坐标格式
c_anc = d21.box_corner_to_center(anchors)
# 🔧 应用中心点调整
pred_bbox_xy = (offset_preds[:, :2] * c_anc[:, 2:] / 10 + c_anc[:, :2]
# 🔧 应用尺寸调整
pred_bbox_wh = torch.exp(offset_preds[:, 2:] / 5) * c_anc[:, 2:]
# 📦 重组预测框
pred_bbox = torch.cat([pred_bbox_xy, pred_bbox_wh], axis=1)
# 🔄 转换回四角坐标
return d21.box_center_to_corner(pred_bbox)
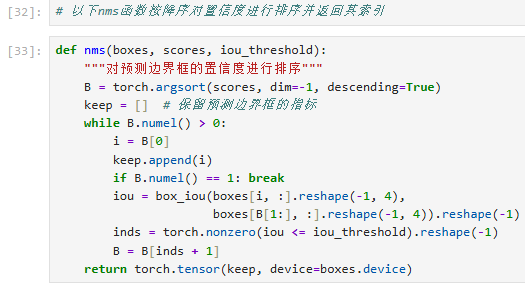
8. NMS - 去重检查
python
def nms(boxes, scores, iou_threshold):
# 📊 按可信度排序
B = torch.argsort(scores, dim=-1, descending=True)
keep = [] # 保留列表
# 🔍 遍历所有盒子
while B.numel() > 0:
i = B[0] # 当前最可信的盒子
keep.append(i) # 加入保留列表
if B.numel() == 1: # 只剩一个盒子时退出
break
# 📏 计算与其他盒子的重叠率
iou = box_iou(boxes[i, :].reshape(-1, 4),
boxes[B[1:], :].reshape(-1, 4)).reshape(-1)
# 🚫 保留重叠率低的盒子
inds = torch.nonzero(iou <= iou_threshold).reshape(-1)
B = B[inds + 1] # 更新待处理列表
return torch.tensor(keep, device=boxes.device) # 📄 返回保留盒子的索引
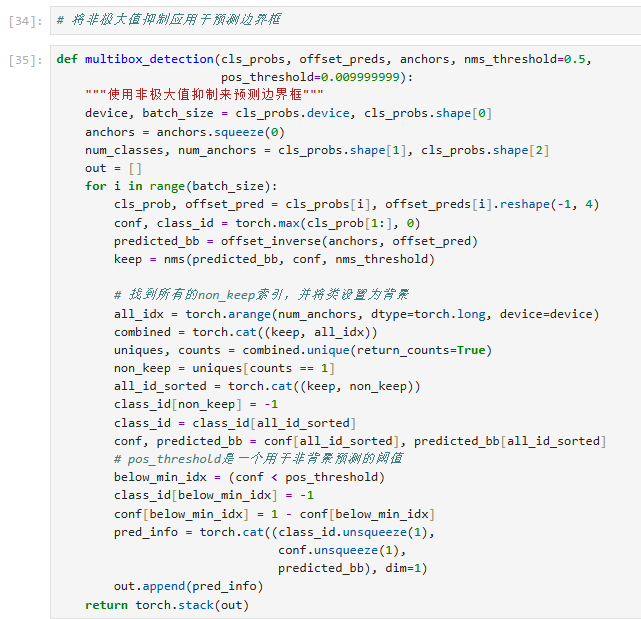
9. 检测后处理 - 生成最终报告
python
def multibox_detection(cls_probs, offset_preds, anchors, nms_threshold=0.5, pos_threshold=0.01):
# 📦 准备报告模板
device = cls_probs.device
batch_size = cls_probs.shape[0]
anchors = anchors.squeeze(0)
out = [] # 最终报告列表
# 🔄 处理每个仓库区域
for i in range(batch_size):
# 📊 获取员工扫描结果
cls_prob = cls_probs[i] # 每个格子的包裹概率
offset_pred = offset_preds[i].reshape(-1, 4) # 尺寸调整建议
# 🎯 找出可能含包裹的格子
conf, class_id = torch.max(cls_prob[1:], 0) # 跳过背景类别
# 🔧 应用尺寸调整
predicted_bb = offset_inverse(anchors, offset_pred)
# 🚫 去重处理
keep = nms(predicted_bb, conf, nms_threshold)
# 📋 重组所有格子信息
all_idx = torch.arange(anchors.shape[0], dtype=torch.long, device=device)
combined = torch.cat([keep, all_idx])
uniques, counts = combined.unique(return_counts=True)
non_keep = uniques[counts == 1] # 找出NMS未保留的格子
# 🏷️ 标记空格子
class_id[non_keep] = -1 # -1表示空格子
# 📊 排序格子信息
all_id_sorted = torch.cat([keep, non_keep])
conf = conf[all_id_sorted]
predicted_bb = predicted_bb[all_id_sorted]
# 🚫 过滤低可信度格子
below_min_idx = (conf < pos_threshold)
class_id[below_min_idx] = -1 # 标记为空
conf[below_min_idx] = 1 - conf[below_min_idx] # 计算背景概率
# 📝 生成区域报告
pred_info = torch.cat((class_id.unsqueeze(1),
conf.unsqueeze(1),
predicted_bb), dim=1)
out.append(pred_info)
return torch.stack(out) # 📑 返回最终报告
全流程总结