基于YOLOv8的无人机位置捕捉识别项目|完整源码数据集+PyQt5界面+完整训练流程+开箱即用!
源码包含:完整YOLOv8训练代码+数据集(带标注)+权重文件+直接可允许检测的yolo检测程序+直接部署教程/训练教程'
项目摘要
本项目集成了 YOLOv8无人机目标检测模型 与 PyQt5图形界面工具,实现了对无人机在图像或视频中的精准位置识别和可视化操作。支持图片、视频、摄像头、文件夹批量输入等多种检测方式,并提供完整训练流程与模型部署方案。适用于安防监控、野外无人值守、目标跟踪等场景。
无论你是AI初学者,还是工程实战开发者,都可以借助本项目快速部署自己的无人机识别系统,源码与教程全部开放,开箱即用。
前言
随着无人机的广泛应用,如何快速、准确地检测和定位无人机成为安防、监控、空域管控等领域的重要需求。而传统算法存在检测精度不高、实时性不足等问题。
本项目基于 YOLOv8 这一高性能目标检测框架,配合我们精心标注的数据集,成功实现了无人机的精准识别与定位。同时配套设计了 可视化图形界面,无需代码基础也能直接使用。结合完整的训练流程和工程化代码结构,具有极强的实用价值和可扩展性。
一、软件核心功能介绍及效果演示
⭐ 支持单帧图像、文件夹批量检测、MP4视频、摄像头实时流;
⭐ 支持设置检测置信度、IoU阈值、自定义模型路径;
⭐ 可输出检测坐标(x, y, w, h)与无人机编号、类别;
⭐ 推理速度快,适合低延迟场景;
⭐ 可对接后续坐标追踪/目标跟踪系统进行二次开发。
📁 支持文件选择、摄像头启动、一键开始检测;
🧩 参数可调节(模型权重路径、置信度阈值、IoU阈值);
📊 检测日志输出、实时显示处理状态;
💾 一键保存结果图像与检测信息(如框坐标、类别等);
🎯 支持窗口自适应、全屏检测等功能,界面交互友好。
二、软件效果演示
为了直观展示本系统基于 YOLOv8 模型的检测能力,我们设计了多种操作场景,涵盖静态图片、批量图片、视频以及实时摄像头流的检测演示。
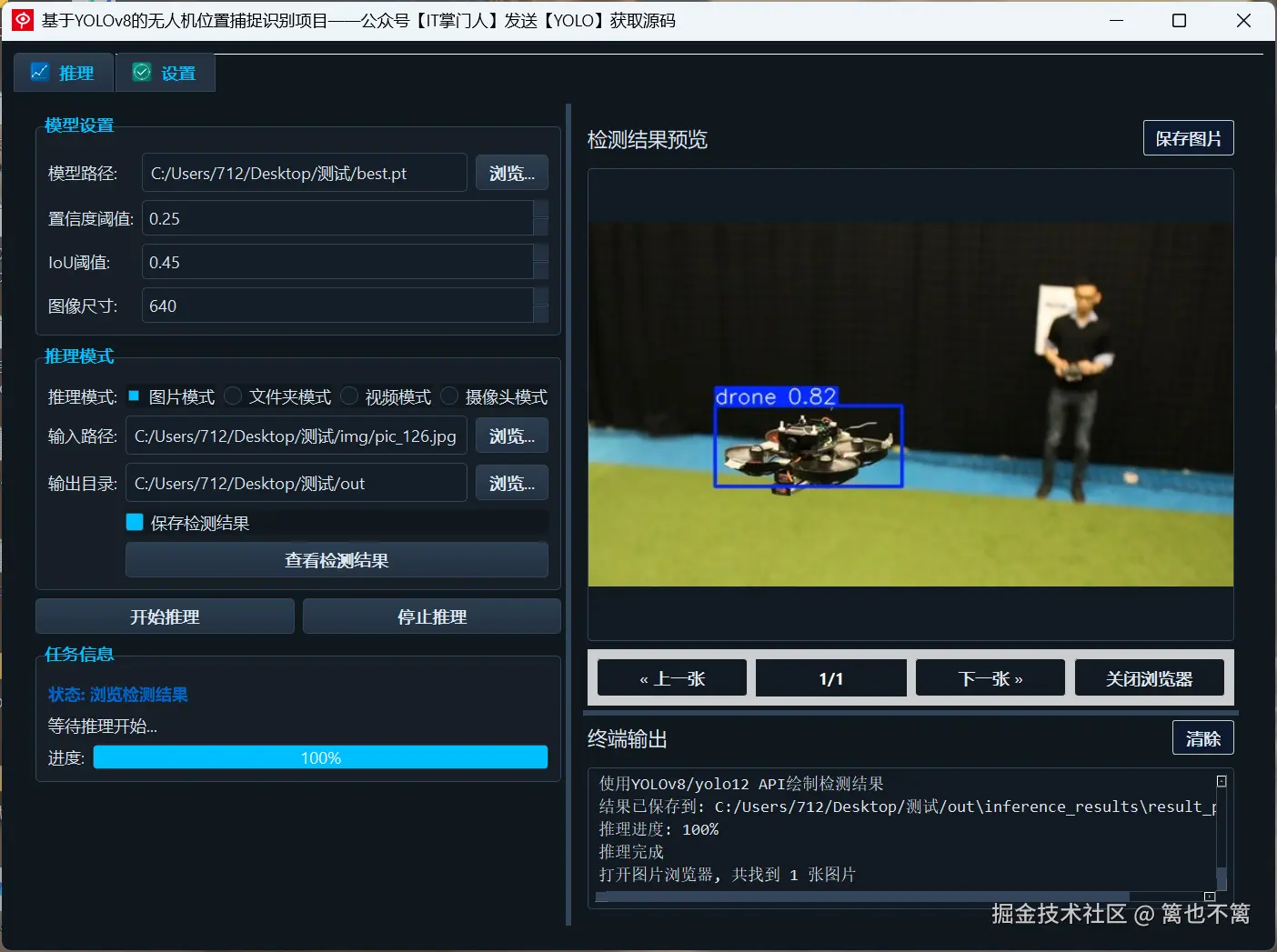
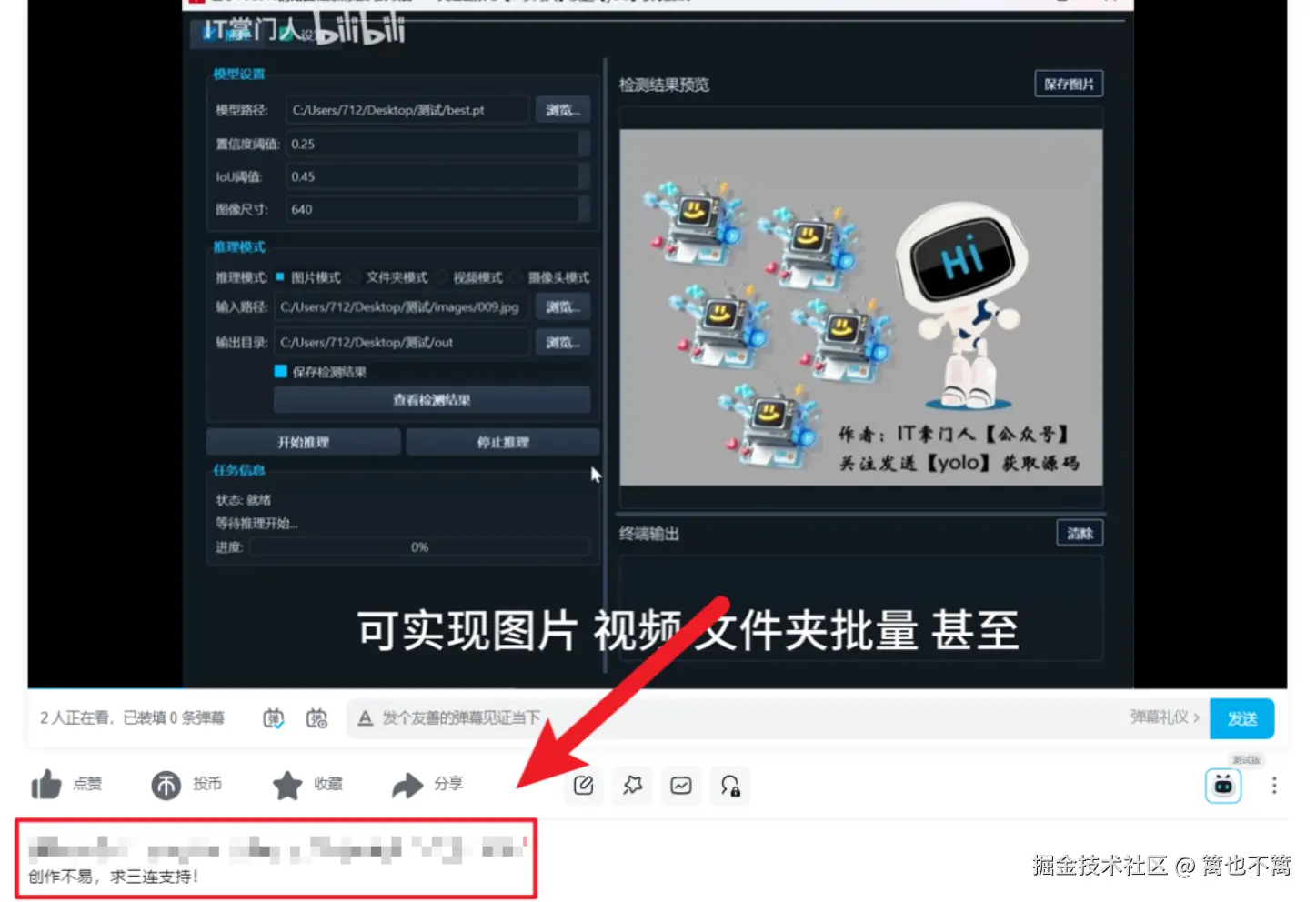
(1)单图片检测演示
用户点击"选择图片",即可加载本地图像并执行检测:
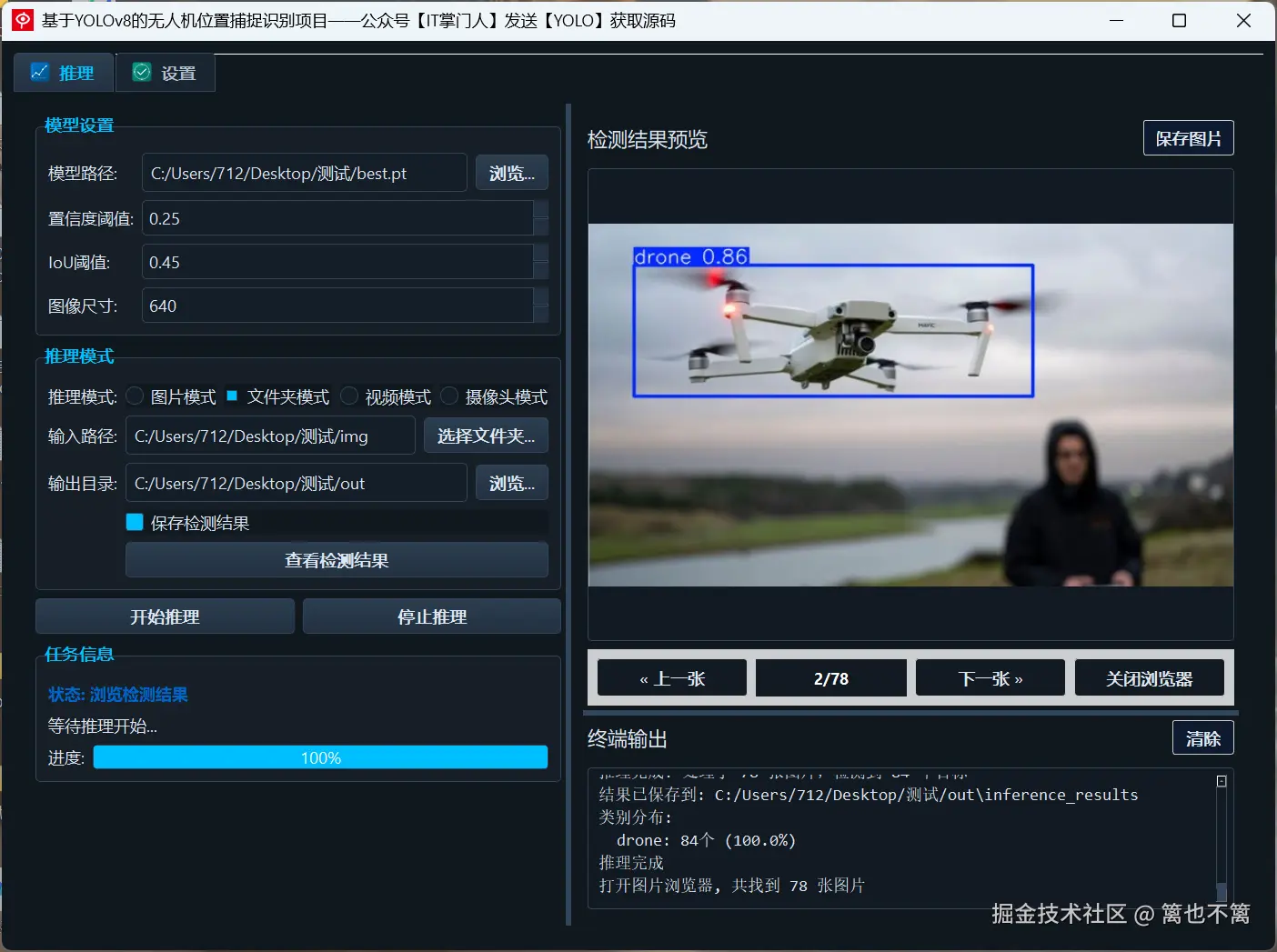
(2)多文件夹图片检测演示
用户可选择包含多张图像的文件夹,系统会批量检测并生成结果图。
(3)视频检测演示
支持上传视频文件,系统会逐帧处理并生成目标检测结果,可选保存输出视频:
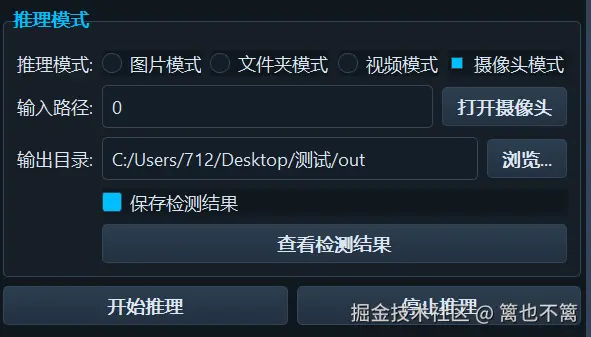
(4)摄像头检测演示
实时检测是系统中的核心应用之一,系统可直接调用摄像头进行检测。由于原理和视频检测相同,就不重复演示了。
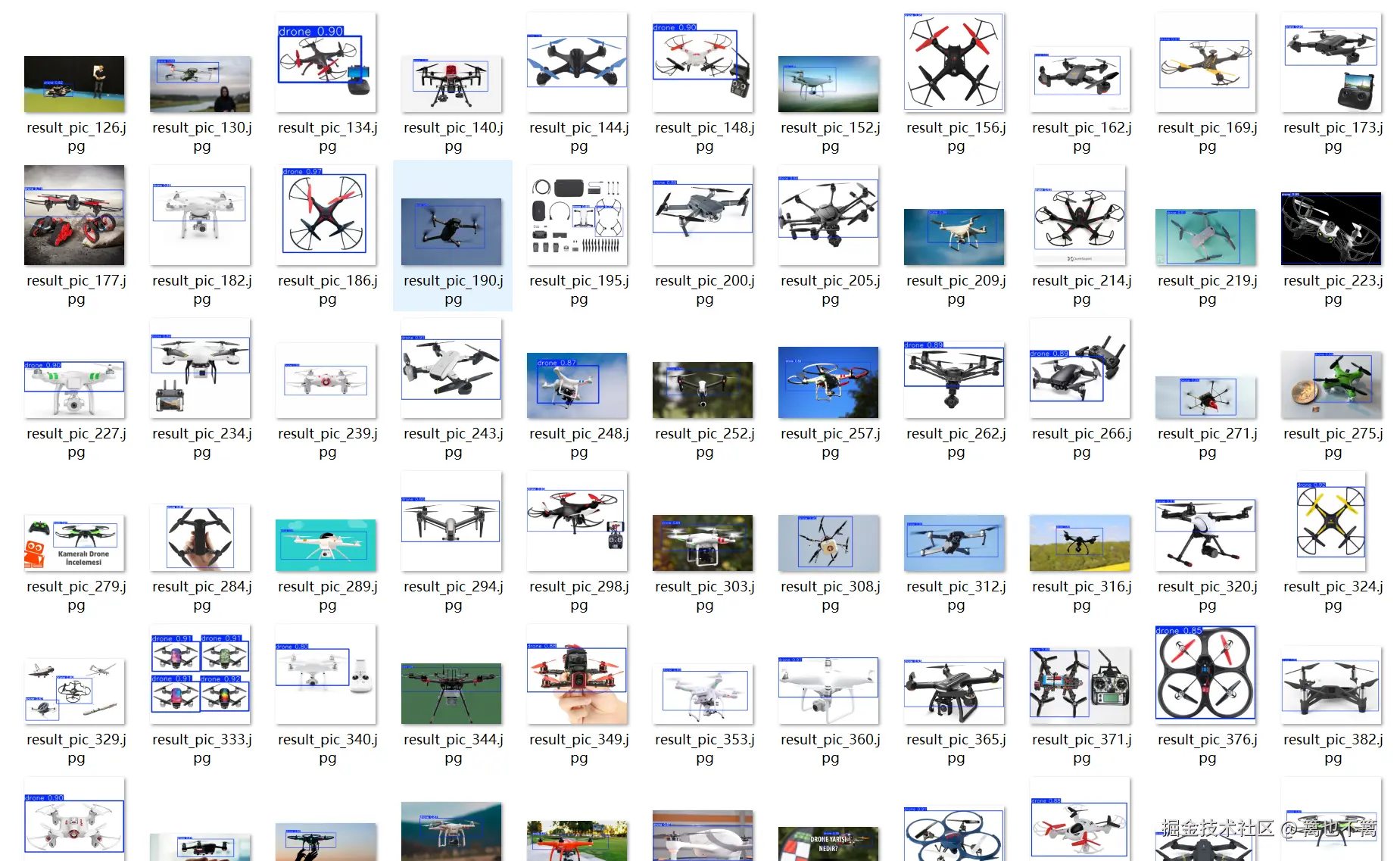
(5)保存图片与视频检测结果
用户可通过按钮勾选是否保存检测结果,所有检测图像自动加框标注并保存至指定文件夹,支持后续数据分析与复审。
三、模型的训练、评估与推理
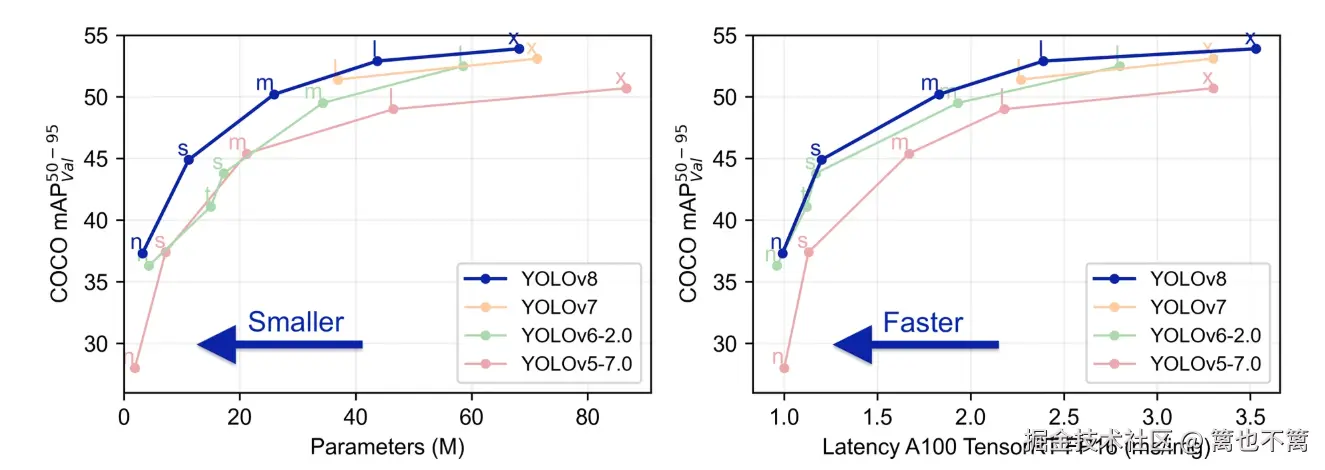
YOLOv8是Ultralytics公司发布的新一代目标检测模型,采用更轻量的架构、更先进的损失函数(如CIoU、TaskAlignedAssigner)与Anchor-Free策略,在COCO等数据集上表现优异。 其核心优势如下:
- 高速推理,适合实时检测任务
- 支持Anchor-Free检测
- 支持可扩展的Backbone和Neck结构
- 原生支持ONNX导出与部署
3.1 YOLOv8的基本原理
YOLOv8 是 Ultralytics 发布的新一代实时目标检测模型,具备如下优势:
- 速度快:推理速度提升明显;
- 准确率高:支持 Anchor-Free 架构;
- 支持分类/检测/分割/姿态多任务;
- 本项目使用 YOLOv8 的 Detection 分支,训练时每类表情均标注为独立目标。
YOLOv8 由Ultralytics 于 2023 年 1 月 10 日发布,在准确性和速度方面具有尖端性能。在以往YOLO 版本的基础上,YOLOv8 引入了新的功能和优化,使其成为广泛应用中各种物体检测任务的理想选择。
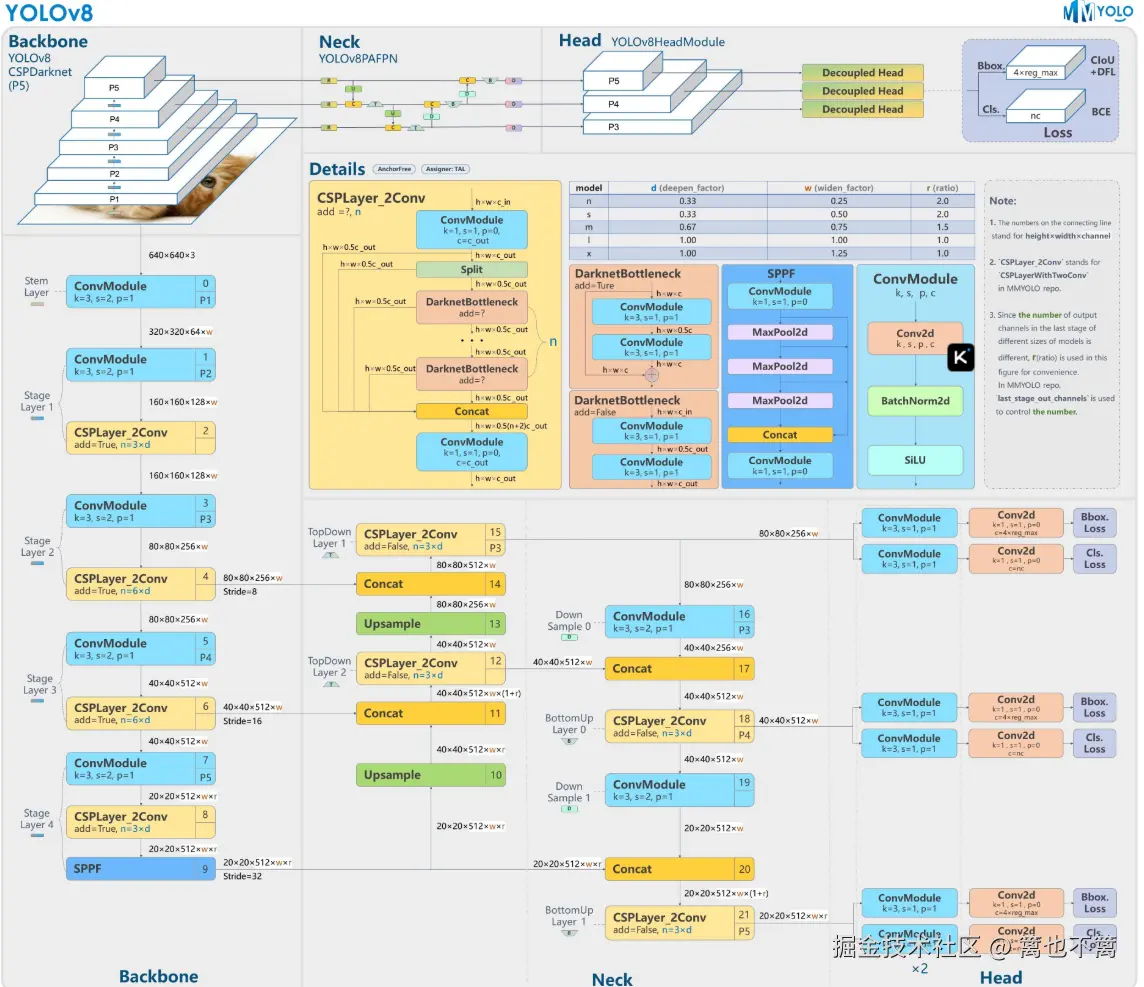
YOLOv8原理图如下:
3.2 数据集准备与训练
采用 YOLO 格式的数据集结构如下:
kotlin
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/每张图像有对应的 .txt 文件,内容格式为:
bash
4 0.5096721233576642 0.352838390077821 0.3947600423357664 0.31825755058365757分类包括(可自定义):

3.3. 训练结果评估
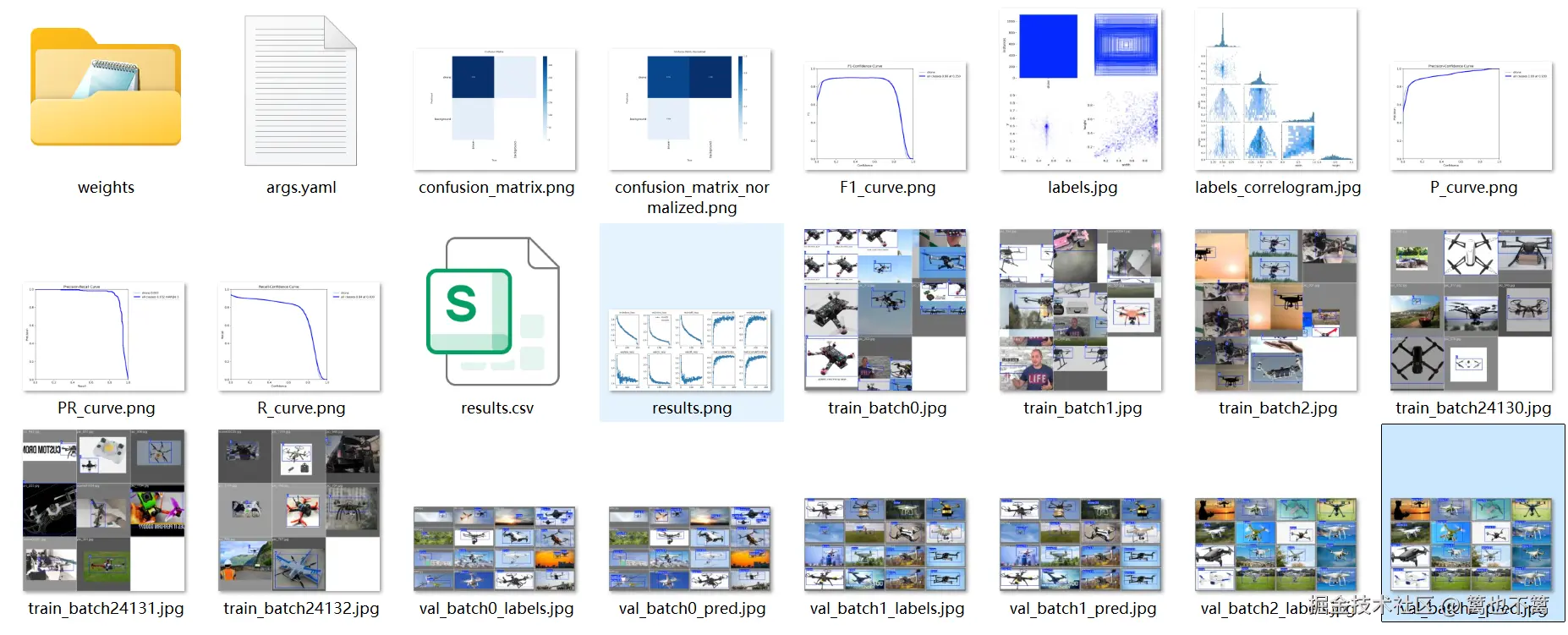
训练完成后,将在 runs/detect/train 目录生成结果文件,包括:
results.png:损失曲线和 mAP 曲线;weights/best.pt:最佳模型权重;confusion_matrix.png:混淆矩阵分析图。
若 mAP@0.5 达到 90% 以上,即可用于部署。
在深度学习领域,我们通常通过观察损失函数下降的曲线来评估模型的训练状态。YOLOv8训练过程中,主要包含三种损失:定位损失(box_loss)、分类损失(cls_loss)和动态特征损失(dfl_loss)。训练完成后,相关的训练记录和结果文件会保存在runs/目录下,具体内容如下:
3.4检测结果识别
使用 PyTorch 推理接口加载模型:
python
import cv2
from ultralytics import YOLO
import torch
from torch.serialization import safe_globals
from ultralytics.nn.tasks import DetectionModel
# 加入可信模型结构
safe_globals().add(DetectionModel)
# 加载模型并推理
model = YOLO('runs/detect/train/weights/best.pt')
results = model('test.jpg', save=True, conf=0.25)
# 获取保存后的图像路径
# 默认保存到 runs/detect/predict/ 目录
save_path = results[0].save_dir / results[0].path.name
# 使用 OpenCV 加载并显示图像
img = cv2.imread(str(save_path))
cv2.imshow('Detection Result', img)
cv2.waitKey(0)
cv2.destroyAllWindows()预测结果包含类别、置信度、边框坐标等信息。

四.YOLOV8+YOLOUI完整源码打包
本文涉及到的完整全部程序文件:包括python源码、数据集、训练代码、UI文件、测试图片视频等(见下图),获取方式见【4.2 完整源码下载】:
4.1 项目开箱即用
作者已将整个工程打包。包含已训练完成的权重,读者可不用自行训练直接运行检测。
运行项目只需输入下面命令。
bash
python main.py读者也可自行配置训练集,或使用打包好的数据集直接训练。
自行训练项目只需输入下面命令。
bash
yolo detect train data=datasets/expression/loopy.yaml model=yolov8n.yaml pretrained=yolov8n.pt epochs=100 batch=16 lr0=0.0014.2 完整源码下载
至项目实录视频下方获取:www.bilibili.com/video/BV1cY...
包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本)
总结
本项目基于当前业界领先的 YOLOv8 模型,成功实现了对无人机目标的实时检测与位置捕捉识别 ,并结合 PyQt5 构建了可视化图形界面,为用户提供了即点即用的完整解决方案。项目具备以下核心优势:
- 🚀 高精度识别:基于YOLOv8训练,准确识别无人机目标并输出坐标、类别、置信度;
- 🖥️ 操作简单:配套GUI界面,支持一键检测、结果保存、日志查看等功能;
- 🧠 训练复现完整:配套公开数据集、标注样例、配置文件,助力用户快速训练自定义模型;
- 🛠️ 支持多场景部署:适用于图像、视频流、摄像头等多种输入方式;
- 🌱 便于学习与扩展:无论是AI初学者还是开发者都能快速上手,亦可用于竞赛/毕业设计等实践场景。
📦 本项目开箱即用、文档完善、代码清晰,是一个理想的目标检测项目实战模板 。未来可扩展至目标跟踪、无人机航线规划、异常行为检测等领域,具备良好的工程实践与研究价值。