1.什么是设备树
设备树(Device Tree),将这个词分开就是"设备"和"树",描述设备树的文件叫做DTS(Device
Tree Source),这个DTS文件采用树形结构描述板级设备,也就是开发板上的设备信息,比如
CPU数量、 内存基地址、IIC接口上接了哪些设备、SPI接口上接了哪些设备等等。如图:
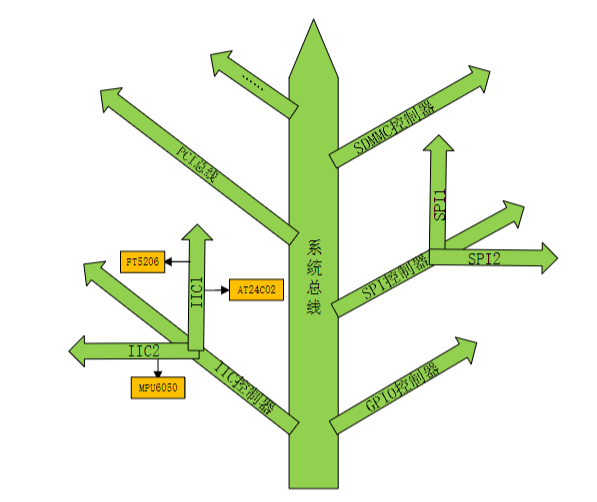
树的主干就是系统总线,IIC控制器、GPIO控制器、SPI控制器等都是接到系统主线上的分支。IIC控制器有分为IIC1和IIC2两种,其中IIC1上接了FT5206和AT24C02这两个IIC设备,IIC2上只接了MPU6050这个设备。DTS文件的主要功能就是按照图所示的结构来描述板子上的设备信息,DTS文件描述设备信息是有相应的语法规则要求的,稍后我们会详细的讲解DTS语法规则。
以前的Linux内核中ARM架构并没有采用设备树。在没有设备树的时候Linux是如何描述ARM架构中的板级信息呢?在Linux内核源码中大量的arch/arm/mach-xxx和arch/arm/plat-xxx文件夹,这些文件夹里面的文件就是对应平台下的板级信息。
cpp
static struct s3c2410fb_display smdk2440_lcd_cfg __initdata = {
.lcdcon5 = S3C2410_LCDCON5_FRM565 |
S3C2410_LCDCON5_INVVLINE |
S3C2410_LCDCON5_INVVFRAME |
S3C2410_LCDCON5_PWREN |
S3C2410_LCDCON5_HWSWP,
};
static struct s3c2410fb_mach_info smdk2440_fb_info __initdata = {
.displays = &smdk2440_lcd_cfg,
.num_displays = 1,
.default_display = 0,
};
static struct platform_device *smdk2440_devices[] __initdata = {
&s3c_device_ohci,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
};上述代码中的结构体变量smdk2440_fb_info就是描述SMDK2440这个开发板上的LCD信
息的,结构体指针数组smdk2440_devices描述的SMDK2440这个开发板上的所有平台相关信
息。这个仅仅是使用2440这个芯片的SMDK2440开发板下的LCD信息,SMDK2440开发板
还有很多的其他外设硬件和平台硬件信息。使用2440这个芯片的板子有很多,每个板子都有描
述相应板级信息的文件,这仅仅只是一个2440。随着智能手机的发展,每年新出的ARM架构
芯片少说都在数十、数百款,Linux内核下板级信息文件将会成指数级增长!这些板级信息文件
都是.c或.h文件,都会被硬编码进Linux内核中,导致Linux内核"虚胖"。就好比你喜欢吃自
助餐,然后花了100多到一家宣传看着很不错的自助餐厅,结果你想吃的牛排、海鲜、烤肉基
本没多少,全都是一些凉菜、炒面、西瓜、饮料等小吃,相信你此时肯定会脱口而出一句"F*k!"、
"骗子!"。同样的,当Linux之父linus看到ARM社区向Linux内核添加了大量"无用"、冗余
的板级信息文件,不禁的发出了一句"This whole ARM thing is a f*cking pain in the ass"。从此以
后ARM社区就引入了PowerPC等架构已经采用的设备树(Flattened Device Tree),将这些描述
板级硬件信息的内容都从Linux内中分离开来,用一个专属的文件格式来描述,这个专属的文
件就叫做设备树,文件扩展名为.dts。一个SOC可以作出很多不同的板子,这些不同的板子肯
定是有共同的信息,将这些共同的信息提取出来作为一个通用的文件,其他的.dts文件直接引
用这个通用文件即可,这个通用文件就是.dtsi文件,类似于C语言中的头文件。一般.dts描述
板级信息(也就是开发板上有哪些IIC设备、SPI设备等),.dtsi描述SOC级信息(也就是SOC有
几个CPU、主频是多少、各个外设控制器信息等)。
这个就是设备树的由来,简而言之就是,Linux内核中ARM架构下有太多的冗余的垃圾板
级信息文件,导致linus震怒,然后ARM社区引入了设备树。
2.DTS、DTB和DTC
上一小节说了,设备树源文件扩展名为.dts,但是我们在前面移植Linux的时候却一直在使
用.dtb文件,那么DTS和DTB这两个文件是什么关系呢?DTS是设备树源码文件,DTB是将
DTS编译以后得到的二进制文件。将.c文件编译为.o需要用到gcc编译器,那么将.dts编译为.dtb
需要什么工具呢?需要用到DTC 工具!DTC工具源码在Linux内核的 scripts/dtc目录下,
scripts/dtc/Makefile文件内容如下:
cpp
hostprogs-y := dtc
always := $(hostprogs-y)
dtc-objs:= dtc.o flattree.o fstree.o data.o livetree.o treesource.o \
srcpos.o checks.o util.o
dtc-objs += dtc-lexer.lex.o dtc-parser.tab.o
...... 可以看出,DTC工具依赖于dtc.c、flattree.c、fstree.c等文件,最终编译并链接出DTC这
个主机文件。如果要编译DTS文件的话只需要进入到Linux源码根目录下,然后执行如下命
令:
cpp
make all或者make dtbs"make all"命令是编译Linux源码中的所有东西,包括zImage,.ko驱动模块以及设备
树,如果只是编译设备树的话建议使用"make dtbs"命令。
基于ARM架构的SOC有很多种,一种SOC又可以制作出很多款板子,每个板子都有一
个对应的DTS文件,那么如何确定编译哪一个DTS文件呢?我们就以I.MX6ULL这款芯片对
应的板子为例来看一下,打开arch/arm/boot/dts/Makefile,有如下内容:
cpp
dtb-$(CONFIG_SOC_IMX6UL) += \
imx6ul-14x14-ddr3-arm2.dtb \
imx6ul-14x14-ddr3-arm2-emmc.dtb \
......
dtb-$(CONFIG_SOC_IMX6ULL) += \
imx6ull-14x14-ddr3-arm2.dtb \
imx6ull-14x14-ddr3-arm2-adc.dtb \
imx6ull-14x14-ddr3-arm2-cs42888.dtb \
imx6ull-14x14-ddr3-arm2-ecspi.dtb \
imx6ull-14x14-ddr3-arm2-emmc.dtb \
imx6ull-14x14-ddr3-arm2-epdc.dtb \
imx6ull-14x14-ddr3-arm2-flexcan2.dtb \
imx6ull-14x14-ddr3-arm2-gpmi-weim.dtb \
imx6ull-14x14-ddr3-arm2-lcdif.dtb \
imx6ull-14x14-ddr3-arm2-ldo.dtb \
imx6ull-14x14-ddr3-arm2-qspi.dtb \
imx6ull-14x14-ddr3-arm2-qspi-all.dtb \
imx6ull-14x14-ddr3-arm2-tsc.dtb \
imx6ull-14x14-ddr3-arm2-uart2.dtb \
imx6ull-14x14-ddr3-arm2-usb.dtb \
imx6ull-14x14-ddr3-arm2-wm8958.dtb \
imx6ull-14x14-evk.dtb \
imx6ull-14x14-evk-btwifi.dtb \
imx6ull-14x14-evk-emmc.dtb \
imx6ull-14x14-evk-gpmi-weim.dtb \
imx6ull-14x14-evk-usb-certi.dtb \
imx6ull-alientek-emmc.dtb \
imx6ull-alientek-nand.dtb \
imx6ull-9x9-evk.dtb \
imx6ull-9x9-evk-btwifi.dtb \
imx6ull-9x9-evk-ldo.dtb
dtb-$(CONFIG_SOC_IMX6SLL) += \
imx6sll-lpddr2-arm2.dtb \
imx6sll-lpddr3-arm2.dtb \
......可以看出,当选中I.MX6ULL这个SOC以后(CONFIG_SOC_IMX6ULL=y),所有使用到
I.MX6ULL这个SOC的板子对应的.dts文件都会被编译为.dtb。如果我们使用I.MX6ULL新做
了一个板子,只需要新建一个此板子对应的.dts 文件,然后将对应的.dtb 文件名添加到 dtb-
$(CONFIG_SOC_IMX6ULL)下,这样在编译设备树的时候就会将对应的.dts编译为二进制的.dtb
文件。
示例代码就是我们在给正点原子的I.MX6U-ALPHA开发板移植Linux系统的时候添加的设备树。关于.dtb文件怎么使用这里就不多说了,前面讲解Uboot移植、Linux内核移植的时候已经无数次的提到如何使用.dtb文件了(uboot中使用bootz或bootm命令向Linux内核传递二进制设备树文件(.dtb))。
3.DTS语法
虽然我们基本上不会从头到尾重写一个.dts文件,大多时候是直接在SOC厂商提供的.dts
文件上进行修改。但是DTS文件语法我们还是需要详细的学习一遍,因为我们肯定需要修改.dts
文件。大家不要看到要学习新的语法就觉得会很复杂,DTS语法非常的人性化,是一种ASCII
文本文件,不管是阅读还是修改都很方便。
本节我们就以imx6ull-alientek-emmc.dts这个文件为例来讲解一下DTS语法。关于设备树
详 细 的 语 法 规 则 请 参 考 《 DevicetreeSpecificationV0.2.pdf 》 和《Power_ePAPR_APPROVED_v1.12.pdf》这两份文档,此两份文档已经放到了开发板光盘中,
路 径为: 4 、参考资 料 ->Devicetree SpecificationV0.2.pdf 、 4 、参 考资料 ->
Power_ePAPR_APPROVED_v1.12.pdf
3.1 .dtsi头文件
和C语言一样,设备树也支持头文件,设备树的头文件扩展名为.dtsi。在imx6ull-alientek-
emmc.dts中有如下所示内容:
cpp
#include <dt-bindings/input/input.h>
#include "imx6ull.dtsi"在.dts设备树文件中,可以通过"#include"来引用.h、.dtsi和.dts文件。只是,我们在编写设备树头文件的时候最好选择.dtsi后缀。
一般.dtsi文件用于描述SOC的内部外设信息,比如CPU架构、主频、外设寄存器地址范
围,比如UART、IIC等等。比如imx6ull.dtsi就是描述I.MX6ULL这颗SOC内部外设情况信息
的,内容如下:
cpp
#include <dt-bindings/clock/imx6ul-clock.h>
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/interrupt-controller/arm-gic.h>
#include "imx6ull-pinfunc.h"
#include "imx6ull-pinfunc-snvs.h"
#include "skeleton.dtsi"
/ {
aliases {
can0 = &flexcan1;
......
};
cpus {
#address-cells = <1>;
#size-cells = <0>;
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
......
};
};
intc: interrupt-controller@00a01000 {
compatible = "arm,cortex-a7-gic";
#interrupt-cells = <3>;
interrupt-controller;
reg = <0x00a01000 0x1000>,
<0x00a02000 0x100>;
};
clocks {
#address-cells = <1>;
#size-cells = <0>;
ckil: clock@0 {
compatible = "fixed-clock";
reg = <0>;
#clock-cells = <0>;
clock-frequency = <32768>;
clock-output-names = "ckil";
};
......
};
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
interrupt-parent = <&gpc>;
ranges;
busfreq {
compatible = "fsl,imx_busfreq";
......
};
gpmi: gpmi-nand@01806000{
compatible = "fsl,imx6ull-gpmi-nand", "fsl, imx6ul-gpmi-nand";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x01806000 0x2000>, <0x01808000 0x4000>;
......
};
......
};
};示例代码中第 54~89 行就是 cpu0 这个设备节点信息,这个节点信息描述了I.MX6ULL这颗SOC所使用的CPU信息,比如架构是cortex-A7,频率支持996MHz、792MHz、528MHz、396MHz和198MHz等等。在imx6ull.dtsi文件中不仅仅描述了cpu0这一个节点信息,I.MX6ULL这颗SOC所有的外设都描述的清清楚楚,比如ecspi1~4、uart1~8、usbphy1~2、i2c1~4
等等,关于这些设备节点信息的具体内容我们稍后在详细的讲解。
3.2设备节点
设备树是采用树形结构来描述板子上的设备信息的文件,每个设备都是一个节点,叫做设
备节点,每个节点都通过一些属性信息来描述节点信息,属性就是键---值对。以下是从
imx6ull.dtsi文件中缩减出来的设备树文件内容:
cpp
/ {
aliases {
can0 = &flexcan1;
};
cpus {
#address-cells = <1>;
#size-cells = <0>;
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
};
};
intc: interrupt-controller@00a01000 {
compatible = "arm,cortex-a7-gic";
#interrupt-cells = <3>;
interrupt-controller;
reg = <0x00a01000 0x1000>,
<0x00a02000 0x100>;
};
}第1行,"/"是根节点,每个设备树文件只有一个根节点。细心的同学应该会发现,imx6ull.dtsi
和imx6ull-alientek-emmc.dts这两个文件都有一个"/"根节点,这样不会出错吗?不会的,因为
这两个"/"根节点的内容会合并成一个根节点。
第2、6和17行,aliases、cpus和intc是三个子节点,在设备树中节点命名格式如下:
cpp
node-name@unit-address其中"node-name"是节点名字,为ASCII字符串,节点名字应该能够清晰的描述出节点的
功能,比如"uart1"就表示这个节点是UART1外设。"unit-address"一般表示设备的地址或寄
存器首地址,如果某个节点没有地址或者寄存器的话"unit-address"可以不要,比如"cpu@0"、
"interrupt-controller@00a01000"。
但是我们在示例代码中我们看到的节点命名却如下所示:
cpp
cpu0:cpu@0
label: node-name@unit-address 引入label的目的就是为了方便访问节点,可以直接通过&label来访问这个节点,比如通过
&cpu0就可以访问"cpu@0"这个节点,而不需要输入完整的节点名字。再比如节点 "intc:
interrupt-controller@00a01000",节点label 是intc,而节点名字就很长了,为"interrupt-
controller@00a01000"。很明显通过&intc来访问"interrupt-controller@00a01000"这个节点要方
便很多!
第10行,cpu0也是一个节点,只是cpu0是cpus的子节点。
每个节点都有不同属性,不同的属性又有不同的内容,属性都是键值对,值可以为空或任
意的字节流。设备树源码中常用的几种数据形式如下所示:
cpp
1.字符串
compatible = "arm,cortex-a7";
2.32位无符号整数
reg = <0>;
上述代码设置reg属性的值为0,reg的值也可以设置为一组值,比如:
reg = <0 0x123456 100>;
3.字符串列表
属性值也可以为字符串列表,字符串和字符串之间采用","隔开,如下所示:
compatible = "fsl,imx6ull-gpmi-nand", "fsl, imx6ul-gpmi-nand";
上述代码设置属性compatible的值为"fsl,imx6ull-gpmi-nand"和"fsl, imx6ul-gpmi-nand"。3.3 标准属性
节点是由一堆的属性组成,节点都是具体的设备,不同的设备需要的属性不同,用户可以
自定义属性。除了用户自定义属性,有很多属性是标准属性,Linux下的很多外设驱动都会使用
这些标准属性,本节我们就来学习一下几个常用的标准属性。
1、compatible属性
compatible属性也叫做"兼容性"属性,这是非常重要的一个属性!compatible属性的值是
一个字符串列表,compatible 属性用于将设备和驱动绑定起来。字符串列表用于选择设备所要
使用的驱动程序,compatible属性的值格式如下所示:
bash
"manufacturer,model" 其中 manufacturer表示厂商,model一般是模块对应的驱动名字。比如 imx6ull-alientek-
emmc.dts中sound节点是I.MX6U-ALPHA开发板的音频设备节点,I.MX6U-ALPHA开发板上
的音频芯片采用的欧胜(WOLFSON)出品的WM8960,sound节点的compatible属性值如下:
bash
compatible = "fsl,imx6ul-evk-wm8960","fsl,imx-audio-wm8960"; 属性值有两个,分别为"fsl,imx6ul-evk-wm8960"和"fsl,imx-audio-wm8960",其中"fsl"
表示厂商是飞思卡尔,"imx6ul-evk-wm8960"和"imx-audio-wm8960"表示驱动模块名字。sound
这个设备首先使用第一个兼容值在Linux内核里面查找,看看能不能找到与之匹配的驱动文件,
如果没有找到的话就使用第二个兼容值查。
一般驱动程序文件都会有一个OF匹配表,此OF匹配表保存着一些compatible值,如果设
备节点的compatible属性值和OF匹配表中的任何一个值相等,那么就表示设备可以使用这个
驱动。比如在文件imx-wm8960.c中有如下内容:
cpp
static const struct of_device_id imx_wm8960_dt_ids[] = {
{ .compatible = "fsl,imx-audio-wm8960", },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, imx_wm8960_dt_ids);
static struct platform_driver imx_wm8960_driver = {
.driver = {
.name = "imx-wm8960",
.pm = &snd_soc_pm_ops,
.of_match_table = imx_wm8960_dt_ids,
},
.probe = imx_wm8960_probe,
.remove = imx_wm8960_remove,
};数组imx_wm8960_dt_ids就是imx-wm8960.c这个驱动文件的匹配表,此匹配表只有一个匹配值"fsl,imx-audio-wm8960"。如果在设备树中有哪个节点的compatible属性值与此相等,那么这个节点就会使用此驱动文件。
wm8960采用了platform_driver驱动模式,关于platform_driver驱动后面会讲解。此行设置.of_match_table为imx_wm8960_dt_ids,也就是设置这个platform_driver所使用的OF匹配表。
2、model属性
model属性值也是一个字符串,一般model属性描述设备模块信息,比如名字什么的,比
如:model = "wm8960-audio";
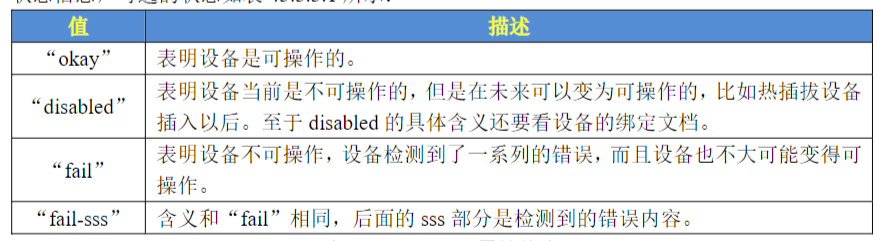
3.status属性
status属性看名字就知道是和设备状态有关的,status属性值也是字符串,字符串是设备的
状态信息,
4、#address-cells和#size-cells属性
这两个属性的值都是无符号32位整形,#address-cells和#size-cells这两个属性可以用在任
何拥有子节点的设备中,用于描述子节点的地址信息。#address-cells属性值决定了子节点reg属
性中地址信息所占用的字长(32位),#size-cells属性值决定了子节点reg属性中长度信息所占的
字长(32位)。#address-cells和#size-cells表明了子节点应该如何编写reg属性值,一般reg属性
都是和地址有关的内容,和地址相关的信息有两种:起始地址和地址长度。
每个"address length"组合表示一个地址范围,其中address是起始地址,length是地址长
度,#address-cells表明address这个数据所占用的字长,#size-cells表明length这个数据所占用
的字长,比如:
cpp
spi4 {
compatible = "spi-gpio";
#address-cells = <1>;
#size-cells = <0>;
gpio_spi: gpio_spi@0 {
compatible = "fairchild,74hc595";
reg = <0>;
};
};
aips3: aips-bus@02200000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
dcp: dcp@02280000 {
compatible = "fsl,imx6sl-dcp";
reg = <0x02280000 0x4000>;
};
};节点spi4的#address-cells = <1>,#size-cells = <0>,说明spi4的子节点reg属
性中起始地址所占用的字长为1,地址长度所占用的字长为0。
子节点gpio_spi: gpio_spi@0的reg 属性值为 <0>,因为父节点设置了#address-
cells = <1>,#size-cells = <0>,因此addres=0,没有length的值,相当于设置了起始地址,而没
有设置地址长度。
设置aips3: aips-bus@02200000节点#address-cells = <1>,#size-cells = <1>,说明aips3: aips-bus@02200000节点起始地址长度所占用的字长为1,地址长度所占用的字长也为1。
子节点dcp: dcp@02280000的reg属性值为<0x02280000 0x4000>,因为父节点设置了#address-cells = <1>,#size-cells = <1>,address= 0x02280000,length= 0x4000,相当于设置了起始地址为0x02280000,地址长度为0x40000。
5.reg属性
reg属性前面已经提到过了,reg属性的值一般是(address,length)对。reg属性一般用于描
述设备地址空间资源信息,一般都是某个外设的寄存器地址范围信息,比如在imx6ull.dtsi中有
如下内容:
cpp
uart1: serial@02020000 {
compatible = "fsl,imx6ul-uart",
"fsl,imx6q-uart", "fsl,imx21-uart";
reg = <0x02020000 0x4000>;
interrupts = <GIC_SPI 26 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_UART1_IPG>,
<&clks IMX6UL_CLK_UART1_SERIAL>;
clock-names = "ipg", "per";
status = "disabled";
};上述代码是节点uart1,uart1节点描述了I.MX6ULL的UART1相关信息,重点是第326行
的reg属性。其中uart1的父节点aips1: aips-bus@02000000设置了#address-cells = <1>、#size-
cells = <1>,因此reg属性中address=0x02020000,length=0x4000。查阅《I.MX6ULL参考手册》
可知,I.MX6ULL的UART1寄存器首地址为0x02020000,但是UART1的地址长度(范围)并没
有0x4000这么多,这里我们重点是获取UART1寄存器首地址。
6.ranges属性
ranges属性值可以为空或者按照(child-bus-address,parent-bus-address,length)格式编写的数字
矩阵,ranges是一个地址映射/转换表,ranges属性每个项目由子地址、父地址和地址空间长度
这三部分组成:
child-bus-address:子总线地址空间的物理地址,由父节点的#address-cells确定此物理地址
所占用的字长。
parent-bus-address:父总线地址空间的物理地址,同样由父节点的#address-cells确定此物
理地址所占用的字长。
length:子地址空间的长度,由父节点的#size-cells确定此地址长度所占用的字长。
如果ranges属性值为空值,说明子地址空间和父地址空间完全相同,不需要进行地址转换,
对于我们所使用的I.MX6ULL来说,子地址空间和父地址空间完全相同,因此会在imx6ull.dtsi
中找到大量的值为空的ranges属性,如下所示:
cpp
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
interrupt-parent = <&gpc>;
ranges;
......
} ranges属性不为空的示例代码如下所示:
cpp
soc {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
ranges = <0x0 0xe0000000 0x00100000>;
serial {
device_type = "serial";
compatible = "ns16550";
reg = <0x4600 0x100>;
clock-frequency = <0>;
interrupts = <0xA 0x8>;
interrupt-parent = <&ipic>;
};
};节点soc定义的ranges属性,值为<0x0 0xe0000000 0x00100000>,此属性值指定了一个1024KB(0x00100000)的地址范围,子地址空间的物理起始地址为0x0,父地址空间的物理起始地址为0xe0000000。
serial是串口设备节点,reg属性定义了serial设备寄存器的起始地址为0x4600,
寄存器长度为 0x100。经过地址转换,serial 设备可以从 0xe0004600 开始进行读写操作,
0xe0004600=0x4600+0xe0000000。
7、name属性
name属性值为字符串,name属性用于记录节点名字,name属性已经被弃用,不推荐使用
name属性,一些老的设备树文件可能会使用此属性。
8、device_type属性
device_type属性值为字符串,IEEE 1275会用到此属性,用于描述设备的FCode,但是设
备树没有 FCode,所以此属性也被抛弃了。此属性只能用于 cpu 节点或者 memory 节点。
imx6ull.dtsi的cpu0节点用到了此属性,内容如下所示:
cpp
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
......
};关于标准属性就讲解这么多,其他的比如中断、IIC、SPI等使用的标准属性等到具体的例
程再讲解。
3.4 根节点compatible属性
每个节点都有compatible属性,根节点"/"也不例外,imx6ull-alientek-emmc.dts文件中根
节点的compatible属性内容如下所示:
cpp
/ {
model = "Freescale i.MX6 ULL 14x14 EVK Board";
compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull";
......
} 可以看出,compatible有两个值:"fsl,imx6ull-14x14-evk"和"fsl,imx6ull"。前面我们说了,
设备节点的compatible属性值是为了匹配Linux内核中的驱动程序,那么根节点中的compatible
属性是为了做什么工作的? 通过根节点的compatible属性可以知道我们所使用的设备,一般第
一个值描述了所使用的硬件设备名字,比如这里使用的是"imx6ull-14x14-evk"这个设备,第二
个值描述了设备所使用的SOC,比如这里使用的是"imx6ull"这颗SOC。Linux内核会通过根
节点的compoatible属性查看是否支持此设备,如果支持的话设备就会启动Linux内核。接下来
我们就来学习一下Linux内核在使用设备树前后是如何判断是否支持某款设备的。
1.使用设备树之前设备匹配方法
在没有使用设备树以前,uboot会向Linux内核传递一个叫做machine id的值,machine id
也就是设备ID,告诉Linux内核自己是个什么设备,看看Linux内核是否支持。Linux内核是
支持很多设备的,针对每一个设备(板子),Linux内核都用MACHINE_START和MACHINE_END
来定义一个 machine_desc 结构体来描述这个设备,比如在文件 arch/arm/mach-imx/mach-
mx35_3ds.c中有如下定义:
cpp
MACHINE_START(MX35_3DS, "Freescale MX35PDK")
/* Maintainer: Freescale Semiconductor, Inc */
.atag_offset = 0x100,
.map_io = mx35_map_io,
.init_early = imx35_init_early,
.init_irq = mx35_init_irq,
.init_time = mx35pdk_timer_init,
.init_machine = mx35_3ds_init,
.reserve = mx35_3ds_reserve,
.restart = mxc_restart,
MACHINE_END上述代码就是定义了"Freescale MX35PDK"这个设备,其中 MACHINE_START 和
MACHINE_END定义在文件arch/arm/include/asm/mach/arch.h中,内容如下:
cpp
#define MACHINE_START(_type,_name) \
static const struct machine_desc __mach_desc_##_type \
__used \
__attribute__((__section__(".arch.info.init"))) = { \
.nr = MACH_TYPE_##_type, \
.name = _name,
#define MACHINE_END \
}; 根据MACHINE_START和MACHINE_END的宏定义,将示例代码43.3.4.2展开后如下所
示:
cpp
static const struct machine_desc __mach_desc_MX35_3DS \
__used \
__attribute__((__section__(".arch.info.init"))) = {
.nr = MACH_TYPE_MX35_3DS,
.name = "Freescale MX35PDK",
/* Maintainer: Freescale Semiconductor, Inc */
.atag_offset = 0x100,
.map_io = mx35_map_io,
.init_early = imx35_init_early,
.init_irq = mx35_init_irq,
.init_time = mx35pdk_timer_init,
.init_machine = mx35_3ds_init,
.reserve = mx35_3ds_reserve,
.restart = mxc_restart,
};从示例代码 中可以看出,这里定义了一个 machine_desc 类型的结构体变量
__mach_desc_MX35_3DS,这个变量存储在".arch.info.init"段中。第 4 行的
MACH_TYPE_MX35_3DS 就是"Freescale MX35PDK"这个板子的 machine id。
MACH_TYPE_MX35_3DS定义在文件include/generated/mach-types.h中,此文件定义了大量的
machine id,内容如下所示:
cpp
#define MACH_TYPE_EBSA110 0
#define MACH_TYPE_RISCPC 1
#define MACH_TYPE_EBSA285 4
#define MACH_TYPE_NETWINDER 5
#define MACH_TYPE_CATS 6
#define MACH_TYPE_SHARK 15
#define MACH_TYPE_BRUTUS 16
#define MACH_TYPE_PERSONAL_SERVER 17
......
#define MACH_TYPE_MX35_3DS 1645
......
#define MACH_TYPE_PFLA03 4575MACH_TYPE_MX35_3DS的值,为1645。
前面说了,uboot会给Linux内核传递machine id这个参数,Linux内核会检查这个machine
id,其实就是将machine id与示例代码43.3.4.3中的这些MACH_TYPE_XXX宏进行对比,看
看有没有相等的,如果相等的话就表示Linux内核支持这个设备,如果不支持的话那么这个设
备就没法启动Linux内核。
2、使用设备树以后的设备匹配方法
当 Linux 内核引入设备树以后就不再使用 MACHINE_START 了,而是换为了
DT_MACHINE_START。DT_MACHINE_START也定义在文件arch/arm/include/asm/mach/arch.h
里面,定义如下:
cpp
#define DT_MACHINE_START(_name, _namestr) \
static const struct machine_desc __mach_desc_##_name \
__used \
__attribute__((__section__(".arch.info.init"))) = { \
.nr = ~0, \
.name = _namestr,可以看出,DT_MACHINE_START和MACHINE_START基本相同,只是.nr的设置不同,
在DT_MACHINE_START里面直接将.nr设置为~0。说明引入设备树以后不会再根据machine
id来检查Linux内核是否支持某个设备了。
打开文件arch/arm/mach-imx/mach-imx6ul.c,有如下所示内容:
cpp
static const char *imx6ul_dt_compat[] __initconst = {
"fsl,imx6ul",
"fsl,imx6ull",
NULL,
};
DT_MACHINE_START(IMX6UL, "Freescale i.MX6 Ultralite (Device Tree)")
.map_io = imx6ul_map_io,
.init_irq = imx6ul_init_irq,
.init_machine = imx6ul_init_machine,
.init_late = imx6ul_init_late,
.dt_compat = imx6ul_dt_compat,
MACHINE_ENDmachine_desc结构体中有个.dt_compat成员变量,此成员变量保存着本设备兼容属性,示
例代码中设置.dt_compat = imx6ul_dt_compat,imx6ul_dt_compat表里面有"fsl,imx6ul"
和"fsl,imx6ull"这两个兼容值。只要某个设备(板子)根节点"/"的 compatible 属性值与
imx6ul_dt_compat表中的任何一个值相等,那么就表示Linux内核支持此设备。imx6ull-alientek-
emmc.dts中根节点的compatible属性值如下:
cpp
compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull"; 其中"fsl,imx6ull"与imx6ul_dt_compat中的"fsl,imx6ull"匹配,因此I.MX6U-ALPHA开
发板可以正常启动Linux内核。如果将imx6ull-alientek-emmc.dts根节点的compatible属性改为
其他的值,比如:
cpp
compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ullll" 重新编译DTS,并用新的DTS启动Linux内核,结果如图所示的错误提示:
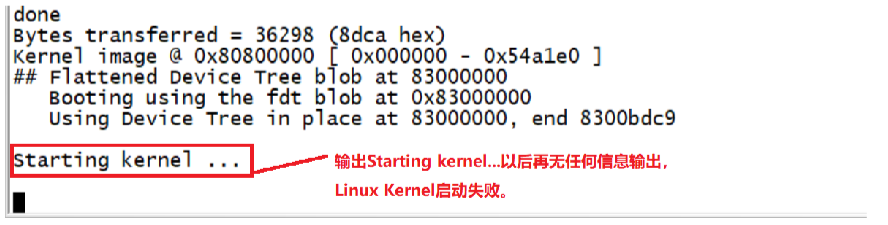
当我们修改了根节点compatible属性内容以后,因为Linux内核找不到对应的设备,因此
Linux内核无法启动。在uboot输出Starting kernel...以后就再也没有其他信息输出了。
接下来我们简单看一下Linux内核是如何根据设备树根节点的compatible属性来匹配出对
应的 machine_desc,Linux 内核调用 start_kernel 函数来启动内核,start_kernel 函数会调用
setup_arch函数来匹配machine_desc,setup_arch函数定义在文件arch/arm/kernel/setup.c中,函
数内容如下(有缩减):
cpp
void __init setup_arch(char **cmdline_p)
{
const struct machine_desc *mdesc;
setup_processor();
mdesc = setup_machine_fdt(__atags_pointer);
if (!mdesc)
mdesc = setup_machine_tags(__atags_pointer, __machine_arch_type);
machine_desc = mdesc;
machine_name = mdesc->name;
......
}调用setup_machine_fdt函数来获取匹配的machine_desc,参数就是atags的首
地址,也就是uboot传递给Linux内核的dtb文件首地址,setup_machine_fdt函数的返回值就是
找到的最匹配的machine_desc。
函数setup_machine_fdt定义在文件arch/arm/kernel/devtree.c中,内容如下(有缩减):
cpp
const struct machine_desc * __init setup_machine_fdt(unsigned int dt_phys)
{
const struct machine_desc *mdesc, *mdesc_best = NULL;
if (!dt_phys || !early_init_dt_verify(phys_to_virt(dt_phys)))
return NULL;
mdesc = of_flat_dt_match_machine(mdesc_best, arch_get_next_mach);
__machine_arch_type = mdesc->nr;
return mdesc;
}调用函数of_flat_dt_match_machine来获取匹配的machine_desc,参数mdesc_best
是默认的 machine_desc,参数 arch_get_next_mach 是个函数,此函数定义在定义在
arch/arm/kernel/devtree.c 文件中。找到匹配的 machine_desc 的过程就是用设备树根节点的
compatible属性值和Linux内核中保存的所以machine_desc结构的. dt_compat中的值比较,看
看那个相等,如果相等的话就表示找到匹配的machine_desc,arch_get_next_mach函数的工作就
是获取Linux内核中下一个machine_desc结构体。
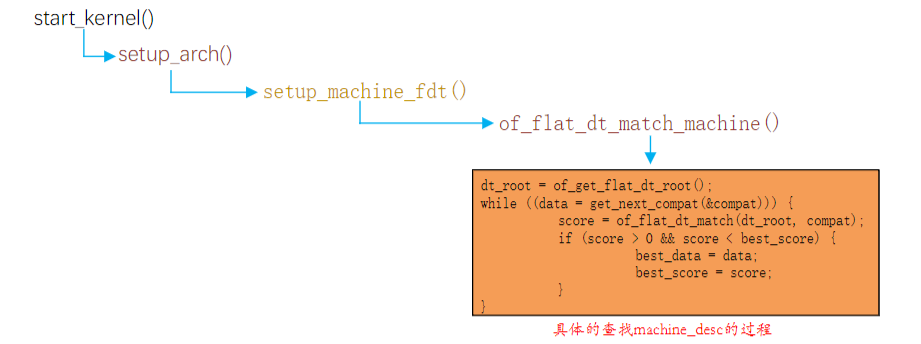
最后再来看一下of_flat_dt_match_machine函数,此函数定义在文件drivers/of/fdt.c中,内
容如下(有缩减):
cpp
const void * __init of_flat_dt_match_machine(const void *default_match,
const void * (*get_next_compat)(const char * const**))
{
const void *data = NULL;
const void *best_data = default_match;
const char *const *compat;
unsigned long dt_root;
unsigned int best_score = ~1, score = 0;
dt_root = of_get_flat_dt_root();
while ((data = get_next_compat(&compat))) {
score = of_flat_dt_match(dt_root, compat);
if (score > 0 && score < best_score) {
best_data = data;
best_score = score;
}
}
pr_info("Machine model: %s\n", of_flat_dt_get_machine_name());
return best_data;
}通过函数of_get_flat_dt_root获取设备树根节点。
此循环就是查找匹配的machine_desc过程,第716行的of_flat_dt_match函数会将根节点compatible属性的值和每个machine_desc结构体中. dt_compat的值进行比较,直至找到匹配的那个machine_desc。
总结一下,Linux内核通过根节点compatible属性找到对应的设备的函数调用过程,如图
3.5 向节点追加或修改内容
产品开发过程中可能面临着频繁的需求更改,比如第一版硬件上有一个IIC接口的六轴芯
片MPU6050,第二版硬件又要把这个MPU6050更换为MPU9250等。一旦硬件修改了,我们
就要同步的修改设备树文件,毕竟设备树是描述板子硬件信息的文件。假设现在有个六轴芯片
fxls8471,fxls8471要接到I.MX6U-ALPHA开发板的I2C1接口上,那么相当于需要在i2c1这
个节点上添加一个fxls8471子节点。先看一下I2C1接口对应的节点,打开文件imx6ull.dtsi文
件,找到如下所示内容:
cpp
i2c1: i2c@021a0000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,imx6ul-i2c", "fsl,imx21-i2c";
reg = <0x021a0000 0x4000>;
interrupts = <GIC_SPI 36 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_I2C1>;
status = "disabled";
};示例代码就是I.MX6ULL的I2C1节点,现在要在i2c1节点下创建一个子节点,这个子节点就是fxls8471,最简单的方法就是在i2c1下直接添加一个名为fxls8471的子节点,如下所示:
cpp
i2c1: i2c@021a0000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,imx6ul-i2c", "fsl,imx21-i2c";
reg = <0x021a0000 0x4000>;
interrupts = <GIC_SPI 36 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_I2C1>;
status = "disabled";
//fxls8471子节点
fxls8471@1e {
compatible = "fsl,fxls8471";
reg = <0x1e>;
};
};添加的fxls8471这个芯片对应的子节点。但是这样会有个问题!i2c1节点是定义在imx6ull.dtsi文件中的,而imx6ull.dtsi是设备树头文件,其他所有使用到I.MX6ULL这颗SOC的板子都会引用imx6ull.dtsi这个文件。直接在i2c1节点中添加fxls8471就相当于在其他的所有板子上都添加了fxls8471这个设备,但是其他的板子并没有这个设备啊!因此,按照示例代码这样写肯定是不行的。
这里就要引入另外一个内容,那就是如何向节点追加数据,我们现在要解决的就是如何向
i2c1节点追加一个名为fxls8471的子节点,而且不能影响到其他使用到I.MX6ULL的板子。
I.MX6U-ALPHA 开发板使用的设备树文件为imx6ull-alientek-emmc.dts,因此我们需要在
imx6ull-alientek-emmc.dts文件中完成数据追加的内容,方式如下:
cpp
&i2c1 {
/* 要追加或修改的内容 */
}; 第1行,&i2c1表示要访问i2c1这个label所对应的节点,也就是imx6ull.dtsi中的"i2c1:
i2c@021a0000"。
第2行,花括号内就是要向i2c1这个节点添加的内容,包括修改某些属性的值。
打开imx6ull-alientek-emmc.dts,找到如下所示内容:
cpp
&i2c1 {
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
status = "okay";
mag3110@0e {
compatible = "fsl,mag3110";
reg = <0x0e>;
position = <2>;
};
fxls8471@1e {
compatible = "fsl,fxls8471";
reg = <0x1e>;
position = <0>;
interrupt-parent = <&gpio5>;
interrupts = <0 8>;
};
};示例代码就是向i2c1节点添加/修改数据,比如第225行的属性"clock-frequency"就表示i2c1时钟为100KHz。"clock-frequency"就是新添加的属性。
将status属性的值由原来的disabled改为okay。
i2c1子节点mag3110,因为NXP官方开发板在I2C1上接了一个磁力计芯片mag3110,正点原子的I.MX6U-ALPHA开发板并没有使用mag3110。
i2c1子节点fxls8471,同样是因为NXP官方开发板在I2C1上接了fxls8471
这颗六轴芯片。
因为示例代码中的内容是imx6ull-alientek-emmc.dts这个文件内的,所以不会对使用I.MX6ULL这颗SOC的其他板子造成任何影响。这个就是向节点追加或修改内容,重点
就是通过&label来访问节点,然后直接在里面编写要追加或者修改的内容。
4 创建小型模板设备树
上一节已经对DTS的语法做了比较详细的讲解,本节我们就根据前面讲解的语法,从头到
尾编写一个小型的设备树文件。当然了,这个小型设备树没有实际的意义,做这个的目的是为
了掌握设备树的语法。在实际产品开发中,我们是不需要完完全全的重写一个.dts设备树文件,
一般都是使用SOC厂商提供好的.dts文件,我们只需要在上面根据自己的实际情况做相应的修
改即可。在编写设备树之前要先定义一个设备,我们就以I.MX6ULL这个SOC为例,我们需要
在设备树里面描述的内容如下:
①、I.MX6ULL这个Cortex-A7架构的32位CPU。
②、I.MX6ULL内部ocram,起始地址0x00900000,大小为128KB(0x20000)。
③、I.MX6ULL内部aips1域下的ecspi1外设控制器,寄存器起始地址为0x02008000,大
小为0x4000。
④、I.MX6ULL内部aips2域下的usbotg1外设控制器,寄存器起始地址为0x02184000,大
小为0x4000。
⑤、I.MX6ULL内部aips3域下的rngb外设控制器,寄存器起始地址为0x02284000,大小
为0x4000。
为了简单起见,我们就在设备树里面就实现这些内容即可,首先,搭建一个仅含有根节点
"/"的基础的框架,新建一个名为myfirst.dts文件,在里面输入如下所示内容:
cpp
/ {
compatible = "fsl,imx6ull-alientek-evk", "fsl,imx6ull";
} 设备树框架很简单,就一个根节点"/",根节点里面只有一个compatible属性。我们就在这
个基础框架上面将上面列出的内容一点点添加进来。
1、添加cpus节点
cpp
/ {
compatible = "fsl,imx6ull-alientek-evk", "fsl,imx6ull";
cpus {
#address-cells = <1>;
#size-cells = <0>;
//CPU0节点
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
};
};
}cpus节点,此节点用于描述SOC内部的所有CPU,因为I.MX6ULL只有一个
CPU,因此只有一个cpu0子节点。
2、添加soc节点
像uart,iic控制器等等这些都属于SOC内部外设,因此一般会创建一个叫做soc的父节点
来管理这些SOC内部外设的子节点,添加soc节点以后的myfirst.dts文件内容如下所示:
cpp
/ {
compatible = "fsl,imx6ull-alientek-evk", "fsl,imx6ull";
cpus {
#address-cells = <1>;
#size-cells = <0>;
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
};
};
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
ranges;
};
}soc节点设置#address-cells = <1>,#size-cells = <1>,这样soc子节点的reg属性中起始地占用一个字长,地址空间长度也占用一个字长。
ranges属性,ranges属性为空,说明子空间和父空间地址范围相同。
3、添加ocram节点
根据第②点的要求,添加ocram节点,ocram是I.MX6ULL内部RAM,因此ocram节点应
该是soc节点的子节点。ocram起始地址为0x00900000,大小为128KB(0x20000),添加ocram
节点以后myfirst.dts文件内容如下所示:
cpp
/ {
compatible = "fsl,imx6ull-alientek-evk", "fsl,imx6ull";
cpus {
#address-cells = <1>;
#size-cells = <0>;
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
};
};
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
ranges;
ocram: sram@00900000 {
compatible = "fsl,lpm-sram";
reg = <0x00900000 0x20000>;
};
}
}ocram节点,第24行节点名字@后面的0x00900000就是ocram的起始地址。第26行的reg属性也指明了ocram内存的起始地址为0x00900000,大小为0x20000。
4、添加aips1、aips2和aips3这三个子节点
I.MX6ULL内部分为三个域:aips1~3,这三个域分管不同的外设控制器.
cpp
我们先在设备树中添加这三个域对应的子节点。aips1~3这三个域都属于soc节点的子节点,
完成以后的myfirst.dts文件内容如下所示:
/ {
compatible = "fsl,imx6ull-alientek-evk", "fsl,imx6ull";
cpus {
#address-cells = <1>;
#size-cells = <0>;
//CPU0节点
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
};
};
//soc节点
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
ranges;
//ocram节点
ocram: sram@00900000 {
compatible = "fsl,lpm-sram";
reg = <0x00900000 0x20000>;
};
//aips1节点
aips1: aips-bus@02000000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02000000 0x100000>;
ranges;
}
//aips2节点
aips2: aips-bus@02100000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02100000 0x100000>;
ranges;
}
//aips3节点
aips3: aips-bus@02200000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02200000 0x100000>;
ranges;
}
}
}5、添加ecspi1、usbotg1和rngb这三个外设控制器节点
最后我们在myfirst.dts文件中加入ecspi1,usbotg1和rngb这三个外设控制器对应的节点,
其中ecspi1属于aips1的子节点,usbotg1属于aips2的子节点,rngb属于aips3的子节点。最终
的myfirst.dts文件内容如下:
cpp
/ {
compatible = "fsl,imx6ull-alientek-evk", "fsl,imx6ull";
cpus {
#address-cells = <1>;
#size-cells = <0>;
//CPU0节点
cpu0: cpu@0 {
compatible = "arm,cortex-a7";
device_type = "cpu";
reg = <0>;
};
};
//soc节点
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
ranges;
//ocram节点
ocram: sram@00900000 {
compatible = "fsl,lpm-sram";
reg = <0x00900000 0x20000>;
};
//aips1节点
aips1: aips-bus@02000000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02000000 0x100000>;
ranges;
//ecspi1节点
ecspi1: ecspi@02008000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,imx6ul-ecspi", "fsl,imx51-ecspi";
reg = <0x02008000 0x4000>;
status = "disabled";
};
}
//aips2节点
aips2: aips-bus@02100000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02100000 0x100000>;
ranges;
//usbotg1节点
usbotg1: usb@02184000 {
compatible = "fsl,imx6ul-usb", "fsl,imx27-usb";
reg = <0x02184000 0x200>;
status = "disabled";
};
}
//aips3节点
aips3: aips-bus@02200000 {
compatible = "fsl,aips-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02200000 0x100000>;
ranges;
//rngb节点
rngb: rngb@02284000 {
compatible = "fsl,imx6sl-rng", "fsl,imx-rng", "imx-rng";
reg = <0x02284000 0x4000>;
};
}
}
}至此,myfirst.dts这个小型的模板设备树就编写好了,基本和imx6ull.dtsi很像,可以看做
是imx6ull.dtsi的缩小版。在myfirst.dts里面我们仅仅是编写了I.MX6ULL的外设控制器节点,
像IIC接口,SPI接口下所连接的具体设备我们并没有写,因为具体的设备其设备树属性内容不
同,这个等到具体的实验在详细讲解。
5 设备树在系统中的体现
Linux内核启动的时候会解析设备树中各个节点的信息,并且在根文件系统的/proc/device-
tree目录下根据节点名字创建不同文件夹,如图
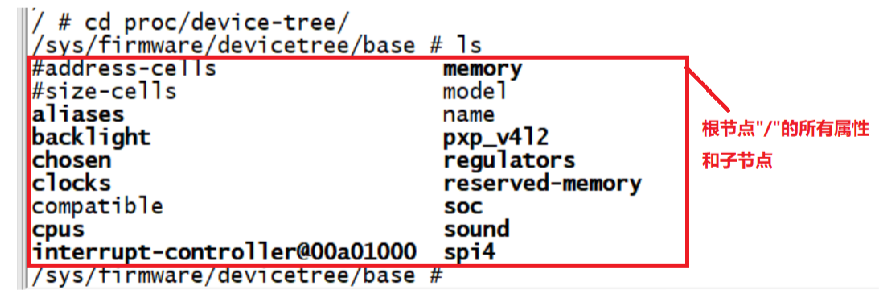
目录/proc/device-tree目录下的内容,/proc/device-tree目录下是根节点"/"的所有属性和子节点,我们依次来看一下这些属性和子节点.
1、根节点"/"各个属性
根节点属性属性表现为一个个的文件(图中细字体文件),比如图的"#address-cells"、"#size-cells"、"compatible"、"model"和"name"这5个文件,它们在设备树中就是根节点的5个属性。既然是文件那么肯定可以查看其内容,输入cat命令来查看model和compatible这两个文件的内容,结果如图

2、根节点"/"各子节点
图中各个文件夹(途中粗字体文件夹)就是根节点"/"的各个子节点,比如"aliases"、
"backlight"、"chosen"和"clocks"等等。大家可以查看一下 imx6ull-alientek-emmc.dts 和
imx6ull.dtsi这两个文件,看看根节点的子节点都有哪些,看看是否和图中的一致。
/proc/device-tree目录就是设备树在根文件系统中的体现,同样是按照树形结构组织的,进
入/proc/device-tree/soc目录中就可以看到soc节点的所有子节点,如图所示:
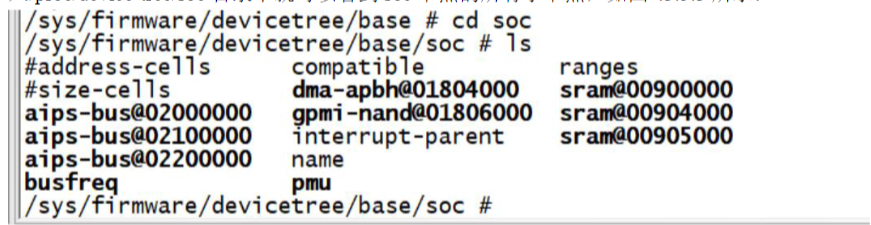
和根节点"/"一样,图中的所有文件分别为soc节点的属性文件和子节点文件夹。大家可以自行查看一下这些属性文件的内容是否和imx6ull.dtsi中soc节点的属性值相同,也可以进入"busfreq"这样的文件夹里面查看soc节点的子节点信息。