上相机+下相机 对位贴合的标定流程(绝对坐标方式)
记录一次实际项目的机器视觉定位贴合项目的相机标定流程,其他同事使用的这种方式,给机械手绝对坐标去贴合,特此记录。
项目概述:
硬件配置情况:安装在三轴模组上的上相机+固定位置安装的下相机+龙门结构三轴模组(上相机和吸嘴刚性固定);
应用场景:2024年3月在昆山世硕电子,内部代号SPK自动化机台项目;
一、棋盘格标定:至少有4个DM码标志。
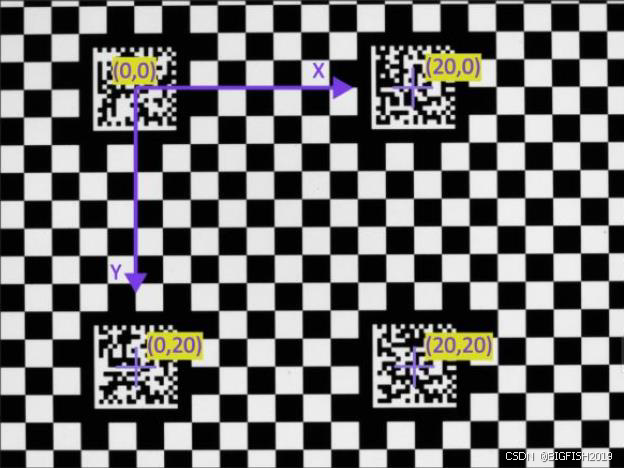
1、将至少包含4个二维码标志的标定片,放在一个纯白背景的标定平台上,上相机移动过来拍照作棋盘格标定,记录拍照机械坐标(X1,Y1)。
2、保持标定片不动,吸嘴过来吸取标定片,记录吸取到标定片的机械坐标(X0,Y0),然后将标定片只平移不旋转到下相机视野中(不用记录机械坐标),拍照作棋盘格标定。
二、9点标定+旋转标定
1、机械手抓取一个标定片或特征物(产品),移动下相机视野范围内,作9+5标定(平移+旋转)。
三、不用示教基准点的注意点和计算公式
1、需要知道每次上相机去放料位置拍照的机械坐标(X2,Y2);
2、上下相机计算的特征点,必须是对应位置,比如贴合后重叠在一起;
3、假设上相机的特征点坐标(X3,Y3),下相机的特征点(X4,Y4);
4、贴合绝对坐标(X5,Y5)的计算公式:
X5=(X3-X4)+X0+(X2-X1)+补偿值;
Y5=(Y3-Y4)+Y0+(Y2-Y1)+补偿值;
四、旋转中心计算
1、用下相机计算出的机械手旋转中心作为计算点,将上下相机的角度求和后计算;
五、各相机的标定使用
1、上下相机用各自的棋盘格标定+共用一个下相机的9点标定;
2、上下相机拍只有平移,没有旋转的同一个棋盘格标定片,实现了2个相机的坐标系平行,即2个相机X轴相互平行,Y轴相互平行,即特征点坐标可以相互加减,再经过9点标定转换成机械手坐标;
3、旋转中心,配合绕点公式,计算出因为旋转产生的额外偏移;