一、禾赛AT128P 128 线混合固态激光雷达使用
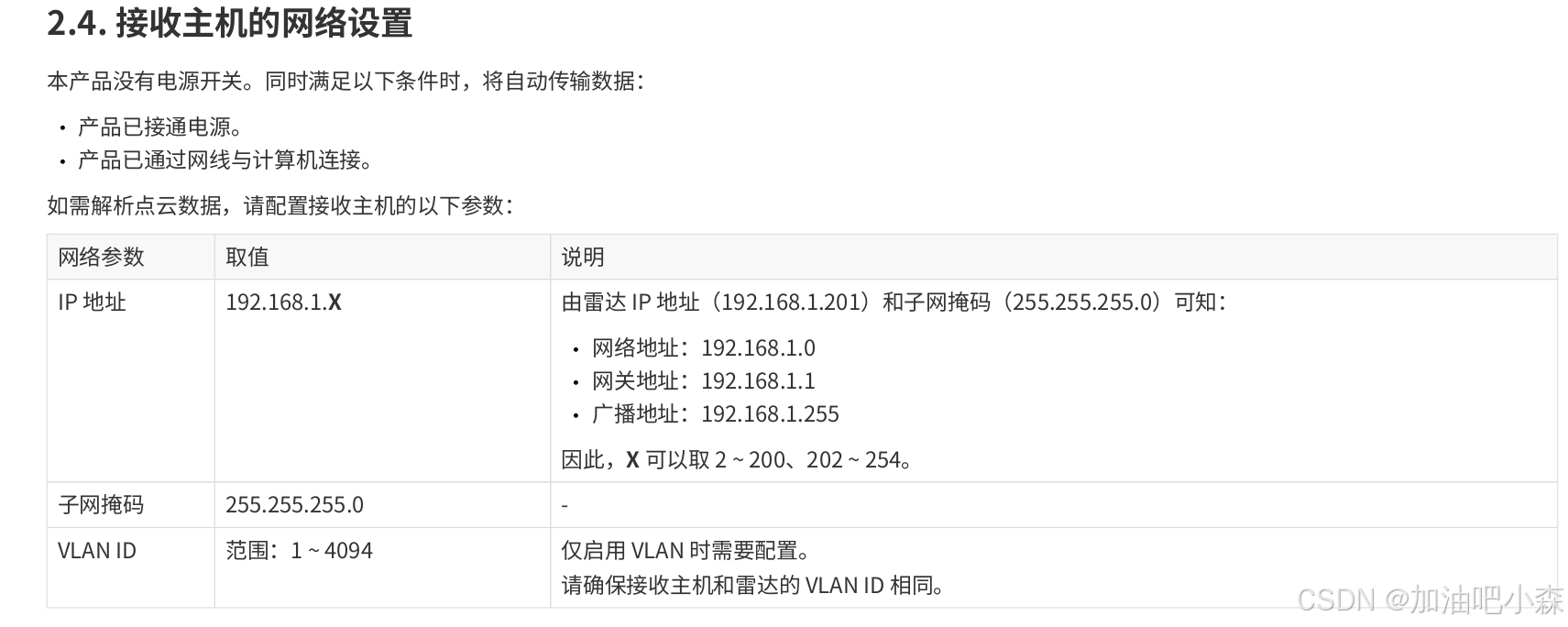
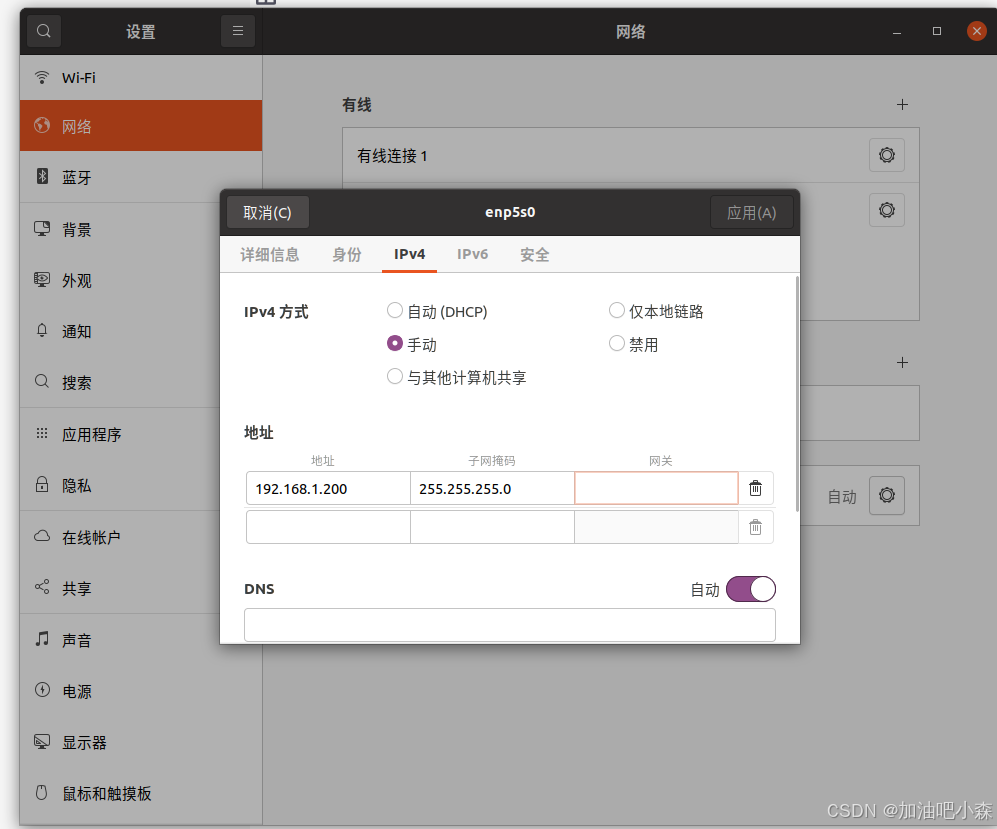
1.1、接收主机网络设置
配置雷达 IP 地址(192.168.1.201)和子网掩码
1.2、配置本地的网络接口名
如需查看本地的网络接口名:
运行命令:ifconfig
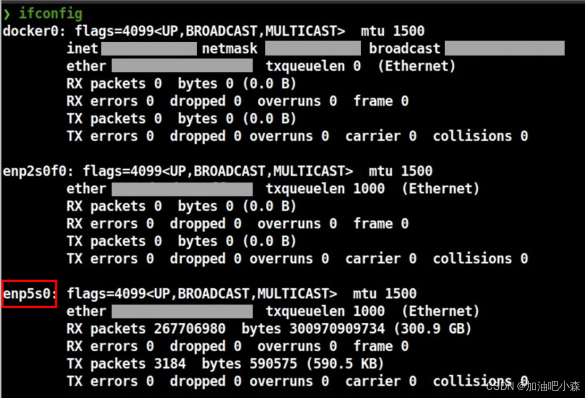
在终端运行命令:sudo ifconfig enp5s0 192.168.1.200

1.3、禾赛雷达ros驱动
从以下链接安装: https://github.com/HesaiTechnology/HesaiLidar_ROS_2.0
Install Boost
sudo apt-get update
sudo apt-get install libboost-all-devInstall Yaml
sudo apt-get update
sudo apt-get install -y libyaml-cpp-devClone
$ git clone --recurse-submodules https://github.com/HesaiTechnology/HesaiLidar_ROS_2.0.gitCompile and run
ros1
创建一个src文件夹,将ros驱动源码复制到其中,然后在HESAI_SDK文件夹执行以下命令
catkin_make
source devel/setup.bash
roslaunch hesai_ros_driver start.launch二、播放包
rostopic echo是一个用于显示在某个话题上发布的数据的命令
在保存bag包的文件下打开终端输入rosbag info ***.bag检查两个话题是否录制成功,因为同步过,两个话题后面的msgs数字应该相同
rostopic list 查看话题列表
1、打开终端,输入:roscore
2、另打开一个终端,输入:rosbag play test_2024-10-15-15-09-17.bag --loop
--loop是循环播放
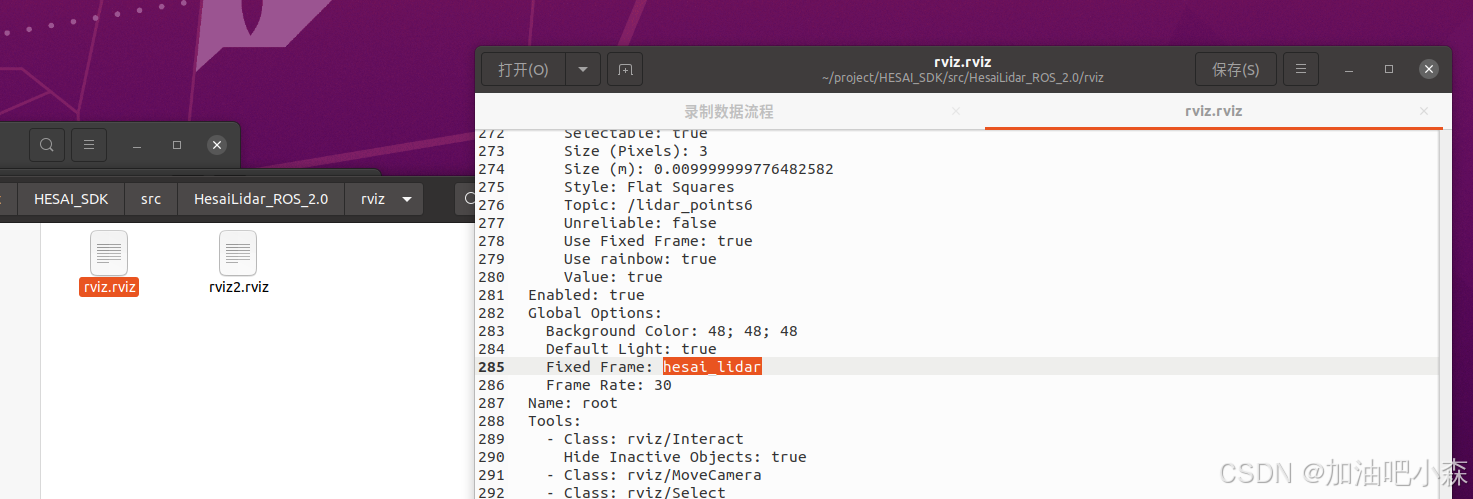
3、打开终端,输入:rviz
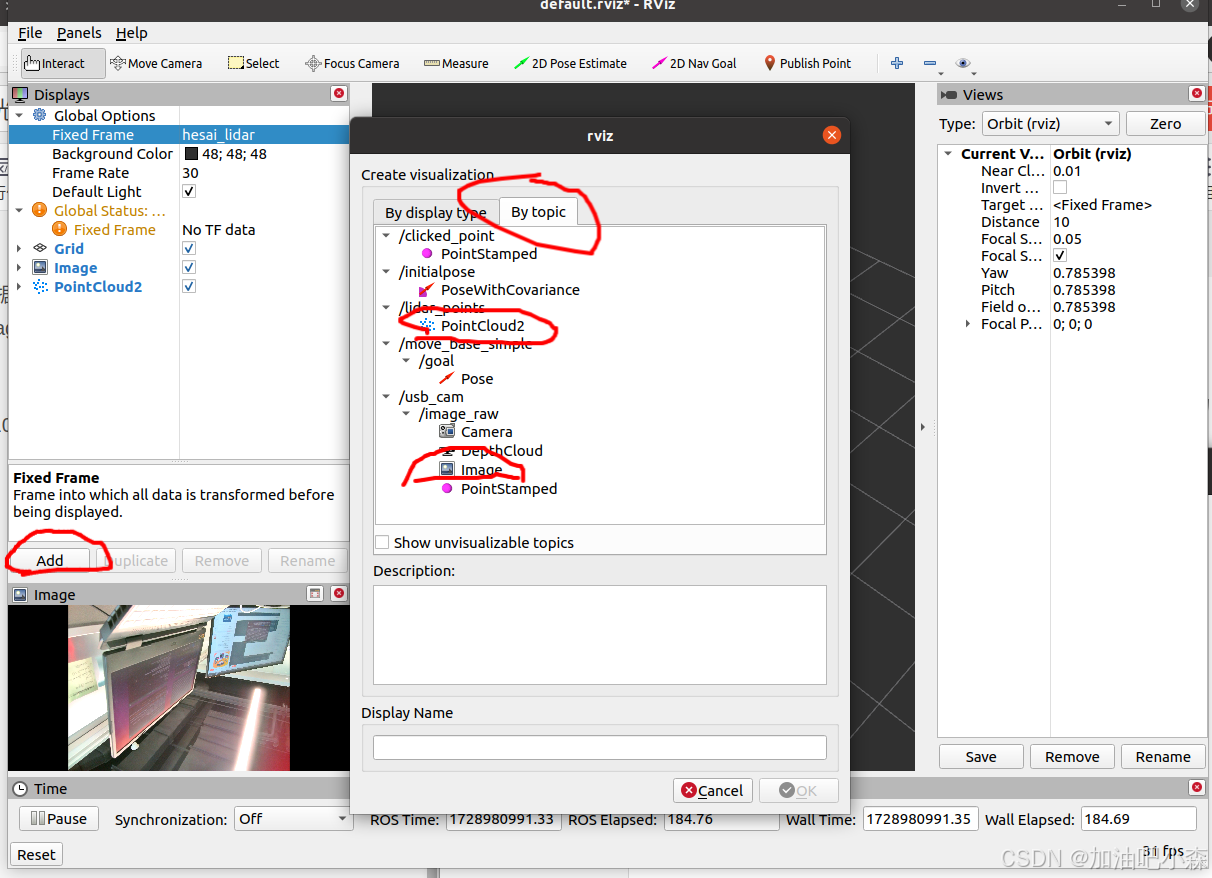
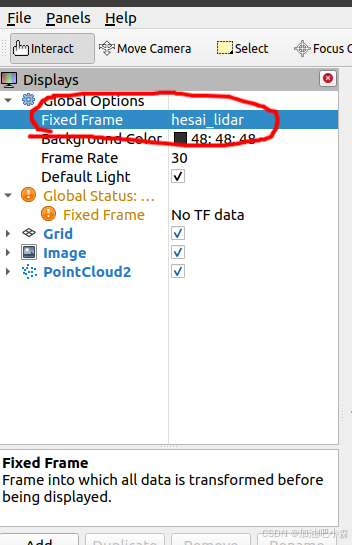
这里的Fixed Frame:hesai_lidar在禾赛ros包中找到