ros-turtlebot3-gazebo-docker
使用 turtlebot3 & Gazebo 配置了一个可以 方便启动的ros2 humble slam仿真环境(docker容器)。
clone项目
git clone -b ros2-humble --recurse-submodules https://github.com/Ts-sound/ros-turtlebot3-gazebo-docker.git- 如果github连接失败,可尝试修改
hosts:
bash
echo "140.82.114.4 github.com" >> /etc/hosts
echo "140.82.113.3 github.com" >> /etc/hosts编译docker镜像
bash
cd src && ./build.sh- 编译成功后,使用
sudo docker images查看编译好的镜像,如下:
bash
~$ sudo docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros2-humble-turtlebot3-sim latest 9d824a494dd1 19 hours ago 4.55GB- 由于国内网络的问题,从dockerhub拉取原始镜像大概率会失败,需要通过镜像站或代理,这个自行搜索可用的镜像站;
- 我这使用github Action 于编译好了镜像,也可以直接下载导入使用:
- Release 地址:github.com/Ts-sound/ro...
- 文件 : github.com/Ts-sound/ro...
- 使用docker导入镜像:
sudo docker < ros2-humble-turtlebot3-sim-v0.0.4.tar.gz
- 导入成功后,使用
sudo docker images查看。
Dockerfile说明
Dockerfile
# 使用 ROS2 Humble 基础镜像作为构建起点
FROM althack/ros2:humble-base
# 更新软件包索引并安装基础工具
# openssh-server: 提供 SSH 远程访问能力
# vim/zip/git/screen: 开发调试常用工具
RUN apt update && apt install -y \
openssh-server vim zip git screen
# 设置美式键盘布局
RUN echo "keyboard-configuration keyboard-configuration/layoutcode string us" | debconf-set-selections && \
echo "keyboard-configuration keyboard-configuration/variantcode string" | debconf-set-selections && \
apt install -y keyboard-configuration
# joy: 游戏手柄控制节点
# teleop-twist-joy/keyboard: 键盘/手柄遥操作
# laser-proc: 激光雷达数据处理工具
RUN apt install -y \
ros-humble-joy ros-humble-teleop-twist-joy \
ros-humble-teleop-twist-keyboard ros-humble-laser-proc
# 安装 Colcon 构建系统(ROS2 标准构建工具)
RUN apt install -y python3-colcon-common-extensions
# 安装可视化工具
# rviz2: ROS 可视化工具
# rqt-graph: 节点拓扑关系可视化
RUN apt install -y ros-humble-rviz2 ros-humble-rqt-graph
# 安装 Gazebo 仿真环境及其 ROS 集成
# ros-humble-gazebo-*: 包含所有 Gazebo 相关插件和接口
RUN apt install -y ros-humble-gazebo-*
# 安装 SLAM 工具 Cartographer
RUN apt install -y \
ros-humble-cartographer \
ros-humble-cartographer-ros
# 安装导航系统 Navigation2
RUN apt install -y \
ros-humble-navigation2 \
ros-humble-nav2-bringup
# 清理 apt 缓存以减小镜像体积
RUN rm -rf /var/lib/apt/lists/*
# 创建 SSH 服务运行目录(sshd 需要此目录)
RUN mkdir /var/run/sshd
# 修改 SSH 配置:
# 1. 允许 root 通过密码登录
# 2. 启用密码认证(默认禁用)
RUN sed -i 's/#PermitRootLogin prohibit-password/PermitRootLogin yes/' /etc/ssh/sshd_config
RUN sed -i 's/#PasswordAuthentication yes/PasswordAuthentication yes/' /etc/ssh/sshd_config
# 复制启动脚本到容器内
# entrypoint.sh: 容器初始化脚本
# start_sim.py: 仿真环境启动脚本(可选)
COPY entrypoint.sh /root/entrypoint.sh
COPY start_sim.py /root/start_sim.py
# 声明容器运行时暴露的端口(SSH 默认端口)
EXPOSE 22
# 设置容器入口点脚本,在启动时自动执行
ENTRYPOINT ["bash","/root/entrypoint.sh"]docker镜像启动
bash
cd src && sudo ./start_docker.shstart_docker.sh文件说明:- 其中
ROOT_PASSWD=1密码存在一定的 安全风险 ,请进入容器后修改密码,ssh也可以禁用root用户登录并设置密钥登陆。 - 由于我是在自己电脑里虚拟机里面运行的docker,网络环境有隔离,外部无法访问,为了使用方便就按简单的方式来。
- 其中
bash
docker run -itd \ # 后台交互模式
-e ROOT_PASSWD=1 \ # 传递root密码环境变量(需在容器内处理)
--privileged \ # 赋予特权(访问设备等)
--shm-size=1g \ # 共享内存1GB(Gazebo等需要)
--ulimit memlock=-1 \ # 不限制锁定内存
--ulimit stack=67108864 \ # 设置栈大小为64MB
--name sim \ # 容器名称
-p 2202:22 \ # 端口映射:宿主机2202->容器22
ros2-humble-turtlebot3-sim \ # 镜像名称
/bin/bash -c "service ssh start && /bin/bash" # 启动命令:启动SSH并进入bash- 也可以添加
-v /home/t/Desktop/workspace/git-repo:/root/ws,将自己的工作空间
ssh 登录容器
- 由于通过
-p 2202:22我们把ssh端口映射到虚拟机的2202端口,可以通过ssh进入容器:
powershell
PS C:\Users\tong> ssh root@192.168.129.152 -p 2202
root@192.168.129.152's password:- 输入默认密码
1, 就可以进入了。 - 这里推荐使用 mobaxterm 工具,一个windows上非常好用且免费的远程软件(X11 server, SSH , ftp , ... )。
- 后面 gazebo,rviz 图像转发直接使用 mobaxterm自带的x11 server, 不然还要配置其他的图像转发工具。
- mobaxterm官方网站: mobaxterm.mobatek.net/
启动仿真环境
编译 turtlebot3_simulations 组件
- git clone 时要包含子模块克隆:
git clone -b ros2-humble --recurse-submodules https://github.com/Ts-sound/ros-turtlebot3-gazebo-docker.git - 仿真环境工作空间为
ros-ws,其中build_turtlebot3_sim.sh是用来编译 turtlebot3_simulations 相关组件的。 - 将
ros-ws映射到容器~/ros-ws目录,或直接复制进去, - 容器里编译 turtlebot3_simulations 组件 :
cd ~/ros-ws && source /opt/ros/humble/setup.bash && colcon build --symlink-install
启动
- 这里通过 python 使用screen 写了个一键启动脚本
start_sim.py - 运行:
bash
cd ~/ros-ws && python3 start_sim.py- 查看screen会话:
bash
~# screen -ls
There are screens on:
7609.key (09/20/2025 04:03:15 AM) (Detached)
7592.world (09/20/2025 04:03:15 AM) (Detached)
7598.slam (09/20/2025 04:03:15 AM) (Detached)
3 Sockets in /run/screen/S-root.-
其中:
- key :启动
ros2 run turtlebot3_teleop teleop_keyboard,用来通过键盘控制仿真小车运动。 - world :启动
ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py, gazebo 仿真。 - slam :启动
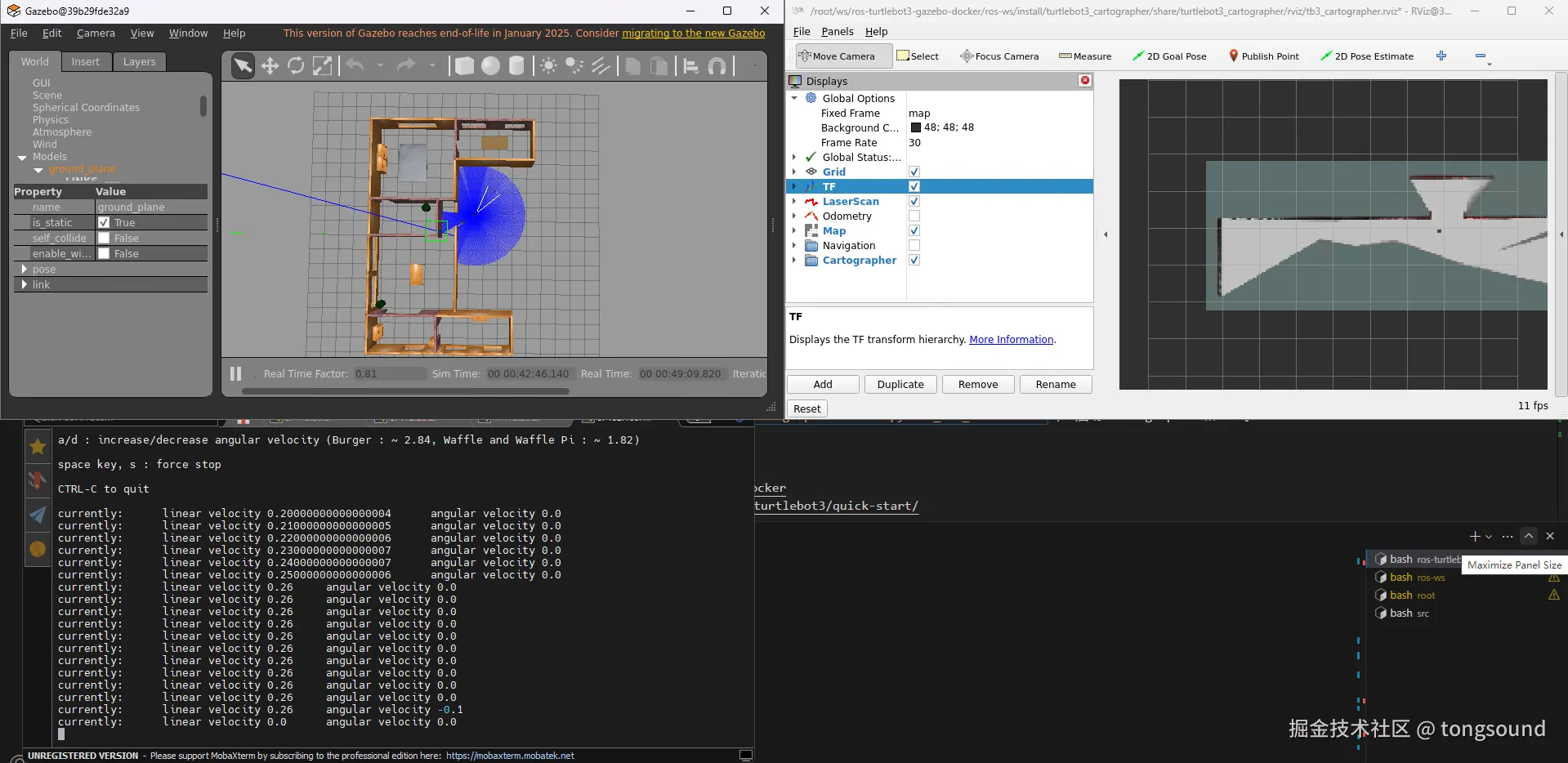
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True, 启动 cartographer node 和 rviz。
- key :启动
-
效果如下:
-
后面就可以根据自己的需求修改 cartographer组件 源码进行测试,或者添加一些其他的 slam 组件进行使用。
-
gazebo 仿真相对来说 对电脑的要求不是很高,我的测试机 CPU是 i5-10210U,内存16G的轻薄本,就可以正常跑。