Isaac Sim机械臂教程 - 阶段2:场景构建与物体创建
阶段1链接 juejin.cn/post/755051...
1. 理论基础
1.1 Isaac Sim导入顺序重要性
关键概念: Isaac Sim有严格的导入顺序要求:
- 必须先创建
SimulationApp实例 - 然后才能导入Isaac相关的模块(包括numpy等科学计算库)
- 这是因为SimulationApp需要初始化底层的物理引擎和渲染引擎
1.2 Isaac Sim物体系统概述
在Isaac Sim中,物体分为几个重要类别:
- Static Objects(静态物体):不参与物理仿真,如装饰性物体
- Dynamic Objects(动态物体):参与物理仿真,可以移动、旋转、碰撞
- Visual Objects(视觉物体):仅用于视觉显示,无物理属性
- Obstacle Objects(障碍物体):需要机械臂避开的物体
1.3 DynamicCuboid详解
DynamicCuboid是Isaac Sim中用于创建动态方块的核心API,它具有:
- 物理属性:质量、摩擦力、弹性等
- 视觉属性:颜色、材质、纹理等
- 空间属性:位置、旋转、尺寸等
- 碰撞检测:支持精确的碰撞计算
1.4 障碍物注册机制
机械臂需要"知道"环境中的障碍物以进行路径规划:
- 空间感知:获取障碍物的几何信息
- 碰撞避免:在运动规划中考虑障碍物
- 动态更新:实时跟踪障碍物状态变化
2. 核心数据结构分析
2.1 CubeSpec类设计的导入顺序问题
问题分析:
python
# ❌ 错误的设计 - 导入顺序问题
class CubeSpec:
def __init__(self, name, color):
self.name = name
self.color = np.array(color) # numpy还没导入就使用了!正确的解决方案:
python
# ✅ 正确的设计 - 延迟numpy使用
class CubeSpec:
def __init__(self, name, color):
self.name = name
self.color = color # 先存储为列表
def get_color_array(self):
"""获取颜色的numpy数组形式"""
import numpy as np
return np.array(self.color)设计理念:
- 延迟计算:需要时才转换为numpy数组
- 兼容性:避免导入顺序冲突
- 封装性:将颜色处理逻辑封装在类内部
2.2 物体配置数据
python
obs_specs = [
CubeSpec("RedCube", [0.7, 0.0, 0.0]),
CubeSpec("BlueCube", [0.0, 0.0, 0.7]),
CubeSpec("YellowCube", [0.7, 0.7, 0.0]),
CubeSpec("GreenCube", [0.0, 0.7, 0.0]),
]颜色系统说明:
- RGB值范围:0.0, 1.0
- 初始存储为Python列表,使用时转换为numpy数组
- 颜色值可用于物体识别和分类
3. 物体创建与定位系统
3.1 空间布局算法
python
width = 0.0515 # 方块边长
for i, (x, spec) in enumerate(zip(np.linspace(0.3, 0.7, len(obs_specs)), obs_specs)):
# 动态计算每个方块的x坐标
position=np.array([x, -0.4, width / 2])关键技术点:
np.linspace(0.3, 0.7, len(obs_specs)):在指定范围内等间距分布width / 2:确保方块底面与地面接触- 固定y坐标(-0.4):所有方块在同一条线上
3.2 DynamicCuboid创建详解
python
obj = world.scene.add(
DynamicCuboid(
prim_path="/World/Obs/{}".format(spec.name), # 唯一路径标识
name=spec.name, # 物体名称
size=width, # 尺寸(立方体边长)
color=spec.get_color_array(), # RGB颜色(修正版)
position=np.array([x, -0.4, width / 2]), # 3D位置
)
)参数详解:
prim_path:在USD场景图中的唯一路径size:立方体的边长(米为单位)color:使用get_color_array()确保正确的numpy格式position:世界坐标系中的位置
4. 常见错误分析与解决
4.1 导入顺序错误
错误现象:
csharp
Error occurred: name 'np' is not defined原因分析:
- Isaac Sim要求先创建SimulationApp再导入其他库
- 在类定义时直接使用numpy会导致导入顺序冲突
解决方案:
python
# ✅ 方案1:延迟使用numpy
class CubeSpec:
def get_color_array(self):
import numpy as np
return np.array(self.color)
# ✅ 方案2:在函数内部导入
def create_scene_objects(world, robot):
import numpy as np
# ... 使用numpy4.2 路径冲突错误
错误预防:
python
# 确保每个物体有唯一的路径
prim_path="/World/Obs/{}".format(spec.name)5. 测试验证
5.1 运行测试
bash
# 激活环境
conda activate isaaclab_4_5_0
cd ~/isaacsim
source setup_conda_env.sh
# 运行第二阶段代码
cd ~/Project/CleanUp_Bench_SVSDF/franka/
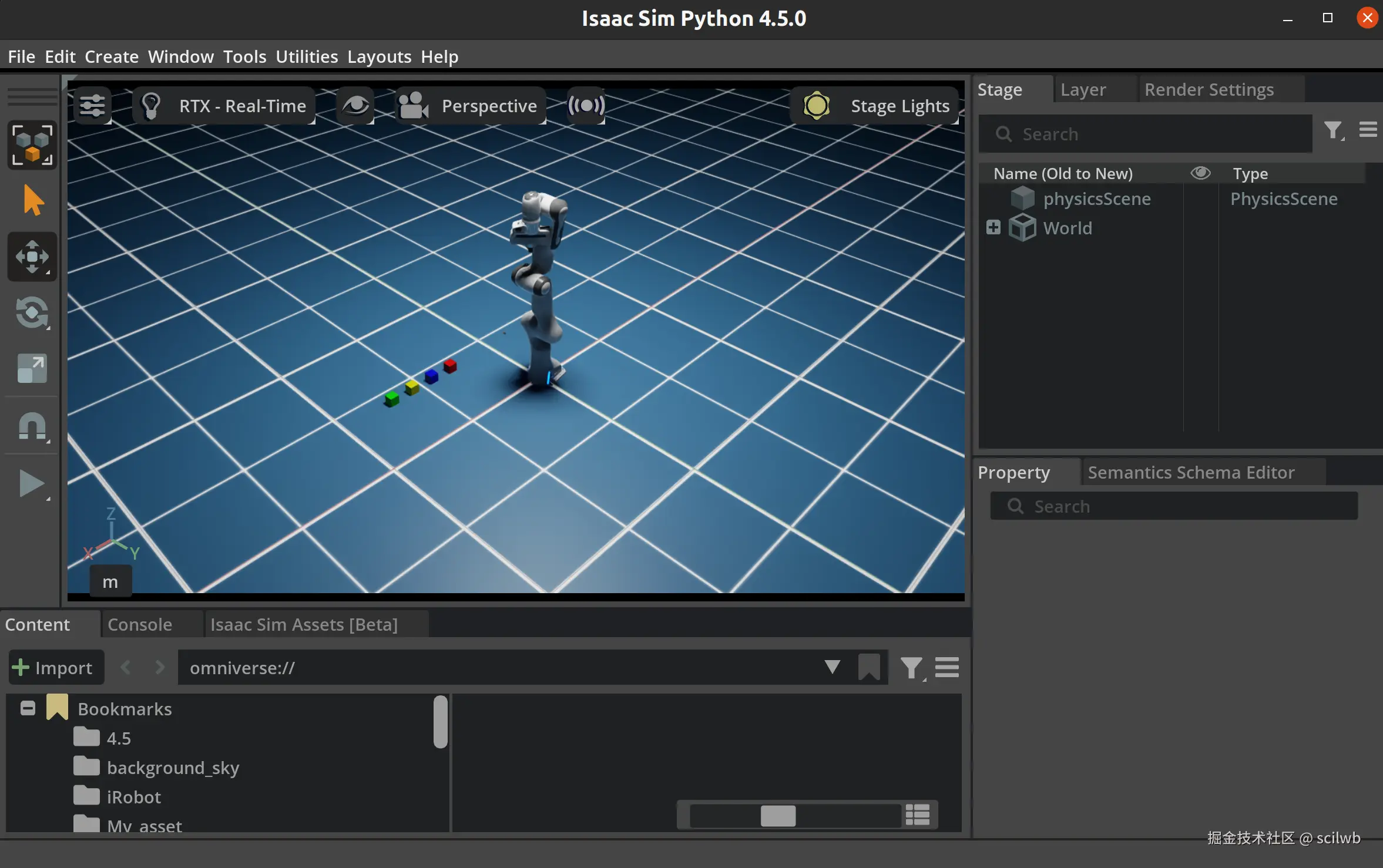
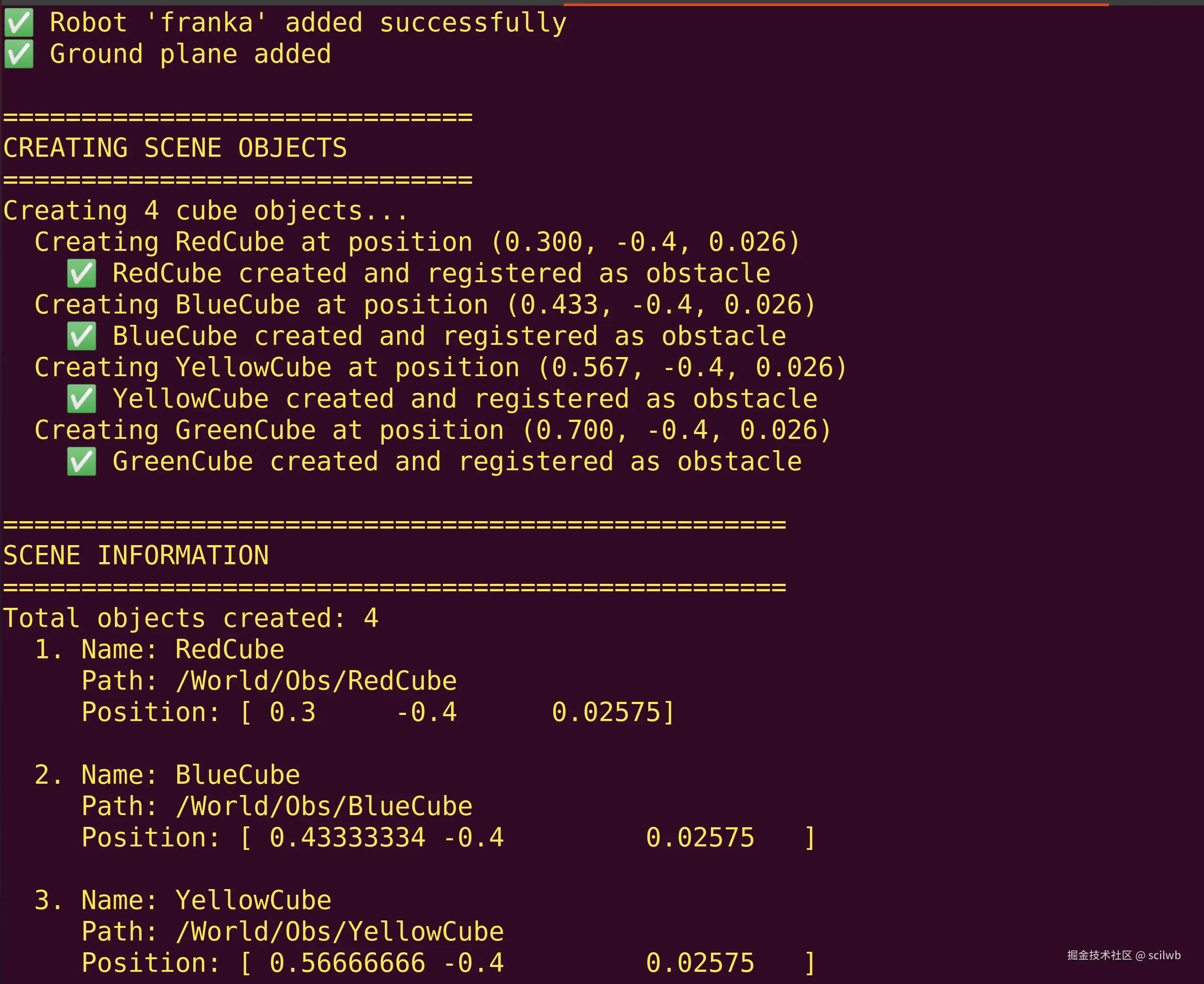
python stage2_scene_building.py5.2 预期效果验证
视觉验证:
- ✅ 看到4个不同颜色的方块排成一行
- ✅ 方块位置:从左到右依次为红、蓝、黄、绿
- ✅ 方块尺寸一致,均为5.15cm边长
- ✅ 方块底面与地面接触
控制台输出验证:
6. 障碍物注册机制详解
6.1 register_obstacle函数
python
robot.register_obstacle(obj)功能解析:
- 空间映射:将物体的几何信息添加到机械臂的环境模型中
- 碰撞检测:启用机械臂与物体的碰撞检测
- 路径规划:在运动规划算法中考虑该障碍物
6.2 障碍物管理生命周期
python
# 创建阶段
obj = world.scene.add(DynamicCuboid(...))
# 注册阶段
robot.register_obstacle(obj)
# 运行时更新(自动)
# Isaac Sim会自动跟踪物体位置变化7. 扩展练习
7.1 添加物体属性检查
python
def validate_scene_objects(objects):
"""验证场景物体的属性"""
import numpy as np
for obj in objects:
pose = obj.get_world_pose()
pos = pose[0]
# 检查位置合理性
if pos[2] < 0: # Z坐标不应该为负
print(f"Warning: {obj.name} below ground level")
# 检查物体间距
for other_obj in objects:
if obj != other_obj:
other_pos = other_obj.get_world_pose()[0]
distance = np.linalg.norm(pos - other_pos)
if distance < 0.1: # 10cm最小间距
print(f"Warning: {obj.name} too close to {other_obj.name}")7.2 动态颜色系统
python
class DynamicCubeSpec(CubeSpec):
"""支持动态颜色变化的方块规格"""
def set_color(self, new_color):
"""运行时改变颜色"""
self.color = new_color
self._color_array = None # 清除缓存
def animate_color(self, time_step):
"""颜色动画效果"""
import math
brightness = 0.5 + 0.5 * math.sin(time_step)
animated_color = [c * brightness for c in self.color]
return animated_color8. 小结
第二阶段核心收获:
理论方面:
- 深入理解Isaac Sim的导入顺序要求
- 掌握动态物体系统的工作原理
- 理解障碍物注册的重要性和机制
实践方面:
- 掌握了正确的代码结构和导入模式
- 学会了CubeSpec类的优化设计
- 实现了空间布局和物体创建
- 解决了实际开发中的导入顺序问题
关键技术突破:
- 导入顺序管理:避免Isaac Sim的导入冲突
- 延迟计算模式:提高代码的健壮性
- 物体生命周期管理:从创建到注册的完整流程
- 调试技巧掌握:快速定位和解决问题
重要经验总结:
- Isaac Sim开发中导入顺序至关重要
- 延迟使用外部库是一种重要的设计模式
- 物体创建需要考虑物理属性和视觉属性
- 障碍物注册是机械臂感知环境的关键步骤
现在你已经成功掌握了Isaac Sim中的场景构建技术。下一阶段我们将深入行为系统与状态监控,让机械臂具备真正的"智能"行为!