一、基本知识
-
传递函数:
- 零初始条件下,线性系统响应量的拉普拉斯变换与激励量的拉普拉斯变换之比,即输出拉普拉斯与输入拉普拉斯之比;
-
根轨迹:
- 分析对象是开环传递函数;
- 画出是闭环传递函数的根的轨迹;
-
Bode图:
- 是开环传递函数的幅频和相频特性;
- 开环Bode,分析稳定性、设计补偿器(增益裕度、相位裕度、带宽);
- 闭环Bode,验证整体性能;
-
理想系统传递函数:
- 较大的直流增益;
- 相位裕度在45°~75°(太大动态响应慢);
- 高频处有较大衰减(抑制噪声);
-
评估动态性能 - 环路带宽
- 定义:增益曲线穿过0dB点的频率;
- 带宽高:响应快,调节性能好,输出电压偏差小;
- 带宽低:响应慢,负载突变时,电压跌落或过冲很大;
- (但带宽太高,系统对开关噪声更敏感)
-
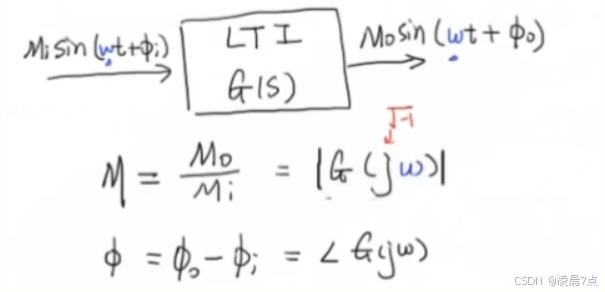
对于线性时不变系统(LTI,Linear Time Invariant),系统传递函数 G ( s ) G(s) G(s):
- 输入: M i sin ( w t + ϕ i ) M_{i}\sin(wt+\phi_{i}) Misin(wt+ϕi)
- 输出: M o sin ( w t + ϕ o ) M_{o}\sin(wt+\phi_{o}) Mosin(wt+ϕo)
- 频率响应: M = M o M i = ∣ G ( j w ) ∣ M=\frac{M_{o}}{M_{i}}=|G(jw)| M=MiMo=∣G(jw)∣
- 幅角响应: ϕ = ϕ o − ϕ i = ∠ G ( j w ) \phi=\phi_{o}-\phi_{i}=∠G(jw) ϕ=ϕo−ϕi=∠G(jw)
二、相位裕度PM、增益裕度GM
-
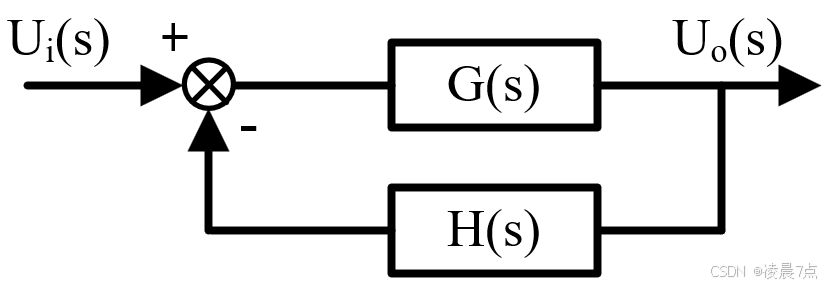
开环传函: T ( s ) = G ( S ) ∗ H ( s ) T(s)=G(S)*H(s) T(s)=G(S)∗H(s)
-
闭环传函:
U o ( s ) U i ( s ) = G ( s ) 1 + G ( s ) ∗ H ( s ) = G ( s ) 1 + T ( s ) \frac{U_{o}(s)}{U_{i}(s)}=\frac{G(s)}{1+G(s)*H(s)}=\frac{G(s)}{1+T(s)} Ui(s)Uo(s)=1+G(s)∗H(s)G(s)=1+T(s)G(s) -
电压波动表达式:
Δ U o ( s ) = G ( s ) 1 + T ( s ) ∗ Δ U i ( s ) \Delta U_{o}(s)=\frac{G(s)}{1+T(s)}*\Delta U_{i}(s) ΔUo(s)=1+T(s)G(s)∗ΔUi(s) -
所以,闭环系统不稳定条件:当 1 + T ( s ) = 0 1+T(s)=0 1+T(s)=0时,系统的干扰波动无限大;
-
此情况的条件有两个方面:
- 开环传函幅值: ∣ T ( s ) ∣ = 1 = 0 d B |T(s)|=1=0dB ∣T(s)∣=1=0dB;
- 开环传函相位: ∠ T ( s ) = − 180 ° ∠T(s)=-180° ∠T(s)=−180°;
-
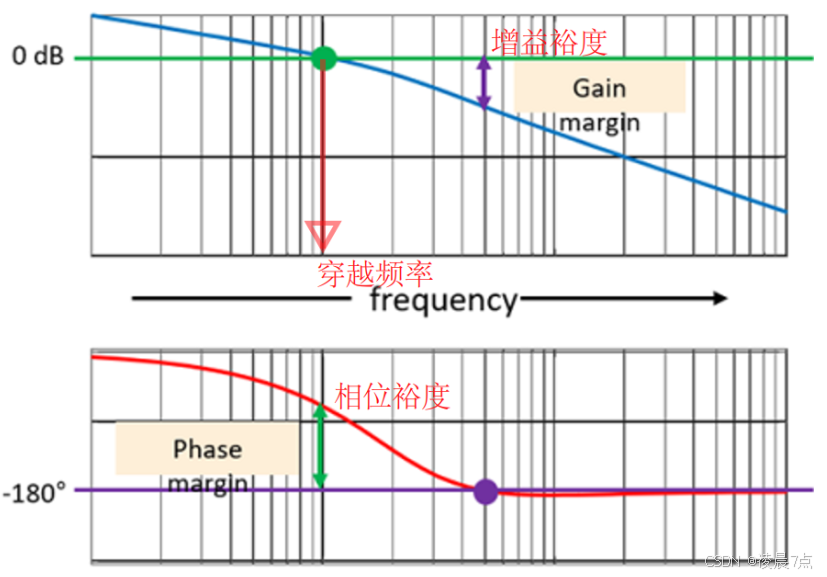
穿越频率:也叫截止频率、剪切频率:
- 开环Bode中,是增益曲线与0dB线的交叉点,称为开环截止频率,记作 w c w_{c} wc;
- 闭环Bode中,是增益曲线与-3dB线的交叉点,称为闭环截止频率,也称为带宽频率,记作 w b w_{b} wb,频率范围 ( 0 , w b ) (0,w_{b}) (0,wb),称为系统的带宽;
-
相位裕度(Phase Margin, PM)
- 当 ∣ T ( s ) ∣ = 1 |T(s)|=1 ∣T(s)∣=1, ∠ T ( s ) ∠T(s) ∠T(s)不能为 − 180 ° -180° −180°;
- 此时,和 − 180 ° -180° −180°的距离为裕度;
- 通常,保持 45 ° < P M < 75 ° 45°<PM<75° 45°<PM<75°;
-
增益裕度(Gain Margin, GM)
- 当 ∠ T ( s ) = − 180 ° ∠T(s)=-180° ∠T(s)=−180°, ∣ T ( s ) ∣ |T(s)| ∣T(s)∣不能为 1 1 1;
- 此时,和1的距离为裕度;
- 通常,保持 G M > 6 d B GM>6dB GM>6dB;
三、极点Pole、零点Zero
- 极点、零点:
- 极点:使得传递函数的分母为0;(极点会使得传递函数数学计算结果变"极"大)
- 零点:使得传递函数的分子为0;(零点会使得传递函数数学计算结果变"零")
- 传递函数 H ( s ) = ( s + a ) / ( s + b ) H(s)=(s+a)/(s+b) H(s)=(s+a)/(s+b),其中 − b -b −b就是极点, − a -a −a就是零点;
- 极点和零点指的都是某个频率点,极点频率 f p f_{p} fp、零点频率 f z f_{z} fz;
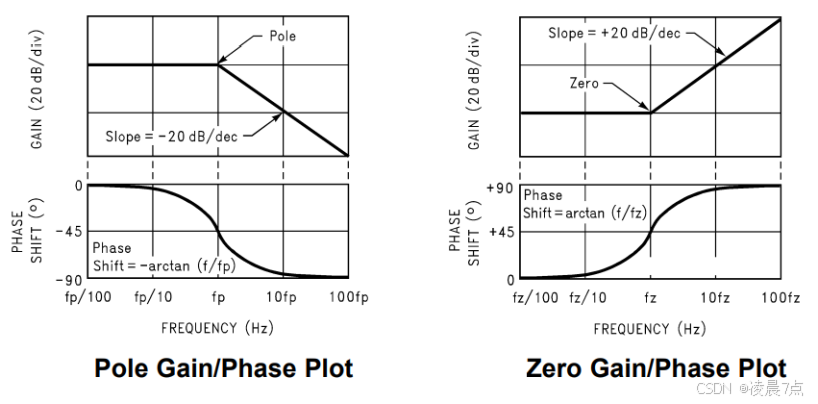
- Bode图中,在极点位置上:
- 增益:计算为直流增益减去3dB;
- 相位:系统的相移已经有45°;
- (一个极点会给系统带来90°的相移,相位在极点频率两边以 − 45 ° / -45°/ −45°/十倍频的斜率变化为0°和 − 90 ° -90° −90°)
- Bode图中,在零点位置上:
- 增益:计算为直流增益加上3dB;
- 相位:系统的相移已经有45°;
- (一个零点点会给系统带来90°的相移,相位在极点频率两边以 + 45 ° / +45°/ +45°/十倍频的斜率变化为0°和 + 90 ° +90° +90°)
- Bode图中,极点之后:
- 增益:随着频率增大,幅值进一步衰减,增益按照( − 20 d B / -20dB/ −20dB/十倍频)衰减;
- 相位:随着频率增大,相位进一步滞后,按照( − 45 ° / -45°/ −45°/十倍频)衰减;
- Bode图中,零点之后:
- 增益:随着频率增大,幅值进一步增大,增益按照( + 20 d B / +20dB/ +20dB/十倍频)增大;
- 相位:随着频率增大,相位进一步超前,相位按照( + 45 ° / +45°/ +45°/十倍频)增大;
- 如果系统中有两个极点,随着频率增大,增益衰减、相位滞后至 − 180 ° -180° −180°,可能导致系统振荡;
- 所以通常并不希望存在极点,但由于元器件的寄生参数,极点是天然存在的;为避免系统输出振荡,一般人为增加零点,这就是频率补偿;
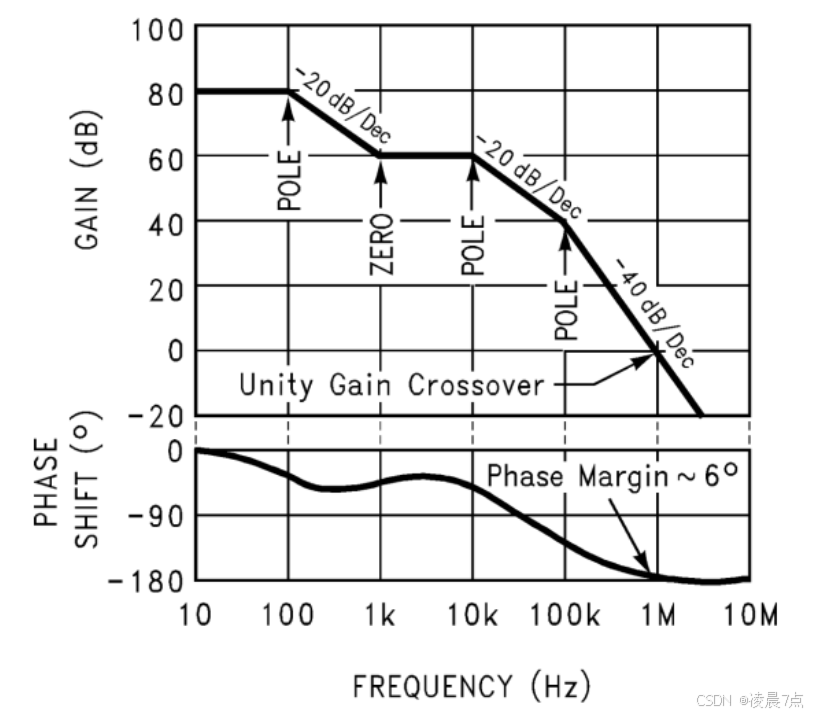
- 零点Zero的作用:抵消极点Pole的作用,矫正输出信号衰减的趋势、矫正相位滞后的趋势;
- 如下图:零点的作用就体现在1kHz频率的位置,零点抵消了前一个极点(100Hz)引起的增益衰减作用;
学习来源:知乎
学习来源:B站_DRCAN
学习来源:Hailandao