我们正在见证人工智能的又一次时代跃迁,大模型加速从数字世界迈向物理世界。让智能体真正理解、适应并与现实环境交互,已成为AI的下一个决定性前沿。
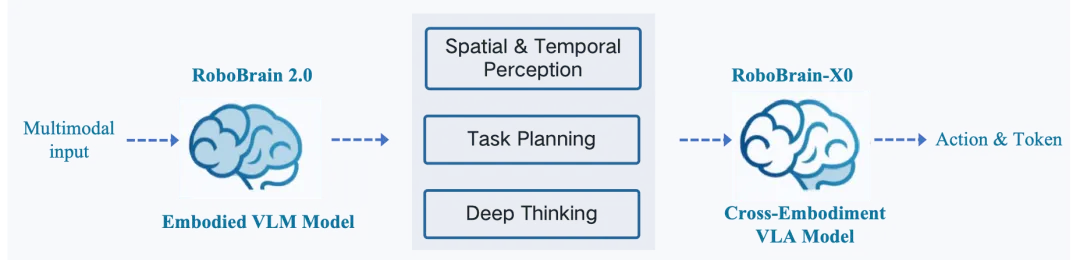
今天,北京智源人工智能研究院正式开源发布 RoboBrain-X0 ------ 一个能够在零样本泛化、少量样本微调条件下,驱动多种不同真实机器人完成复杂任务的跨本体基座大模型。RoboBrain-X0 源自 RoboBrain 的多模态基座能力,在 RoboBrain 2.0 数据基础上,进一步融合了真实机器人动作数据。通过统一建模视觉、语言与动作,它实现了跨本体的泛化与适配,具备从感知到执行的一体化能力。
1 本体泛化困境:产业智能化的核心挑战
近年来机器人领域取得巨大进展,单点能力不断突破,复杂操作、自然语言交互逐步成为现实。但产业落地的最大障碍,并非单项技术的极限,而是智能泛化与迁移能力的缺失。
现实世界充满了多样性与不确定。不同的机器人拥有不同的"身体"(单臂、双臂、轮式、人形),工作在不同的环境(家庭、工厂、办公室),面对形态各异的物体。
过去,几乎每一种新的机器人硬件形态都需要一套独立的开发流程:重复收集数据、反复训练模型、投入大量工程人力进行适配。这种本体泛化困境极大地限制了机器人智能的规模化部署,成为制约产业升级的核心瓶颈。
2 零样本跨本体:一个基座模型,驱动万千身体
为什么人类能在各种工具、环境和身体条件下迅速迁移技能,而机器人却常常"换壳即失灵"?核心在于,人类学到的是任务的本质,比如"把苹果放进篮子",我们理解空间关系、物体属性和因果逻辑,而不是记住具体动作细节。
RoboBrain-X0 的设计理念正是如此:模型首先将复杂任务(如"整理桌面")分解为与具体机器人"身体"解耦的通用语义动作序列,并通过统一映射机制,将"意图"高效转译为多种机器人可直接执行的动作。这一创新架构,让RoboBrain-X0 突破对单一机器人体系的依赖,实现异构本体统一建模,并具备实用级零样本泛化与复杂任务拆解能力。
无论是星海图机器人、智元机器人,还是松灵双臂机器人与 Franka 机械臂,它们背后运行的其实都是同一个通用预训练基座模型。该模型具备零样本泛化能力,完成简单的 pick&place 任务,同时只需在目标任务上进行少量样本微调,即可展现出强大的跨本体适配性,进行复杂任务的拆解和执行。
这意味着,开发者和企业可以从繁琐的底层适配工作中解放出来,将精力更多聚焦于高层创新,大幅降低成本,推动机器人智能走向普惠。
3 开放数据基石,加速机器人走向真实世界
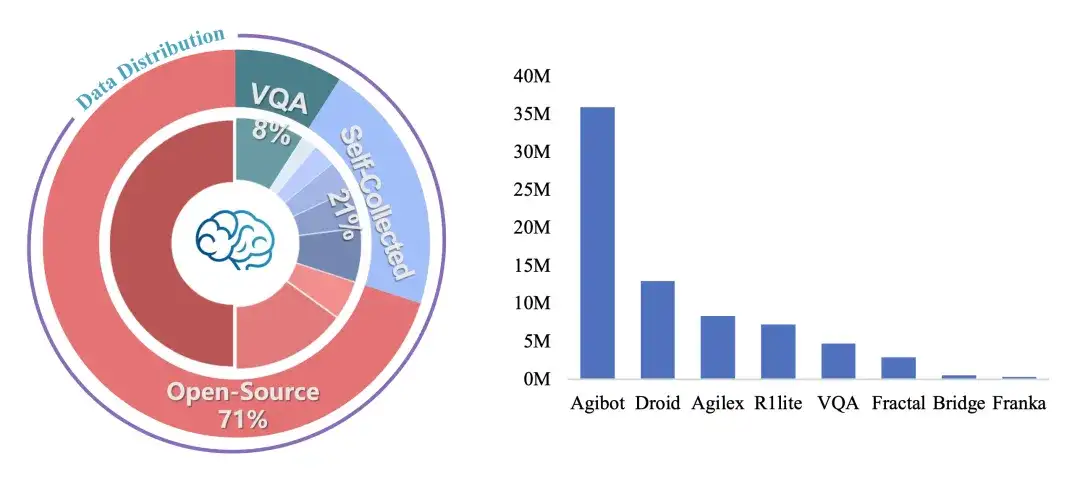
一个强大模型的诞生,离不开海量、高质量数据的支撑。伴随此次模型开源,我们也正式发布其背后的核心训练数据集------RoboBrain-X0-Dataset。
该数据集为模型提供了覆盖"感知-思考-行动"全链路的坚实基础,旨在打破"数据孤岛",为开发者提供开箱即用的研发资源。它主要包含四类关键数据:
-
多模态VQA数据:融合视觉问答与推理数据,显著提升模型从视觉语言到空间交互的理解与响应能力。
-
精选开源动作数据:引入并整合多场景高质量开源数据,强化模型的任务理解与跨场景泛化能力。
-
产业伙伴合作数据:联合星海图、松灵等业界伙伴,在真实机器人上采集并标注的多样化场景数据,有效提升模型在产业一线的适应性。
-
高质量自采数据:体系化构建采集流程,形成多样化的高质量"指令-动作"样本,大幅提升模型在复杂任务分解与动态决策上的能力。
我们已将这一经过统一格式化与严格质量控制的数据集全面开放,希望能加速具身智能技术从实验室走向产业应用的进程。
4 开源共建,迈向通用具身智能时代
我们坚信,只有开放协作才能催生真正普惠、可持续的智能。
RoboBrain-X0 现已全面开源,包括预训练模型、数据集以及技术文档,并完整接入智源 RoboBrain 2.0 工具链。我们希望这套解决方案能提供一个坚实的起点,让每一位开发者都能构建属于自己的、能在真实世界中稳定运行的具身智能应用。
RoboBrain-X0 是智源研究院构建通用具身智能愿景的关键一步。未来,我们将持续迭代,结合指令微调、强化学习等前沿技术,推动模型在复杂任务和开放环境下的表现不断跃升。
期待全球开发者、研究者、机器人企业共同参与,携手推动具身智能技术的持续演进与生态繁荣。
-
RoboBrain-X0 GitHub:https://github.com/FlagOpen/RoboBrain-X0
-
RoboBrain-X0 多芯片版本地址 FlagRelease:https://huggingface.co/FlagRelease/RoboBrain-X0-FlagOS
-
RoboBrain-X0-Dataset:https://huggingface.co/datasets/BAAI/RoboBrain-X0-Dataset
-
RoboBrain 2.0 技术文档:https://arxiv.org/abs/2507.02029
RoboBrain-X0 使用智源自研的大模型训推一体框架 FlagScale 进行大规模分布式训练,大幅提升训练效率。
了解更多:
从云端到终端,从大模型到具身智能:众智FlagOS 1.5引领开放计算生态迈向成熟


更多阅读: 智源全面开源RoboBrain 2.0与RoboOS 2.0:刷新10项评测基准,多机协作加速群体智能 迈向群体智能 | 智源发布首个跨本体具身大小脑协作框架与开源具身大脑