详细地讲解机器人充电房卷帘门的控制原理、涉及的协议和完整工作流程
这是一个典型的工业自动化系统集成案例,涉及到机器人、卷帘门控制器、安全传感器以及上层调度系统之间的协同工作。
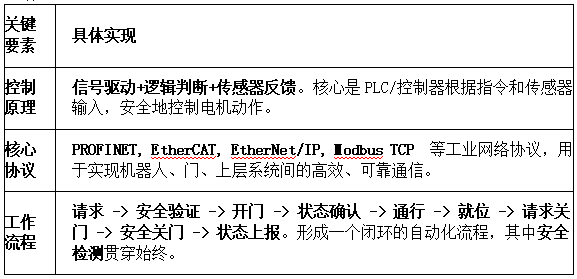
一、 核心控制原理
卷帘门控制的核心是一个 "信号驱动" 的自动化过程。它不依赖于人工按钮,而是由机器人或中央控制系统发出的指令信号来触发。整个系统可以分解为以下几个核心部分:
- 系统组成
执行机构:
电机: 通常是直流电机或交流伺服电机,负责提供卷帘门升降的动力。
驱动器/变频器: 接收控制器的信号,精确控制电机的启动、停止、转速和转向(正转开门、反转关门)。
控制大脑:
门控制器/PLC: 这是整个控制系统的核心。
它通常是一个可编程逻辑控制器或专用的微控制器。
它负责:接收来自各方的指令(如开门、关门、停止)。
处理来自传感器的反馈信号。
根据预设的逻辑程序,向电机驱动器发出动作命令。
监控门的状态(全开、全闭、运行中、故障)并上报。
感知系统(传感器):
限位开关: 这是最关键的位置传感器。通常有两个:
上限位开关: 当门体上升到完全打开的位置时触发,告诉控制器"门已全开",应停止电机。
下限位开关: 当门体下降到完全关闭的位置时触发,告诉控制器"门已全闭",应停止电机。
光电/超声波传感器: 作为安全防撞和到位辅助检测。安装在门框底部或两侧,用于检测门下或门侧是否有障碍物(如机器人、人员、货物)。一旦光束被阻挡,控制器会立即停止关门动作或反转开门,确保安全。
编码器: 安装在电机上,用于精确测量电机的旋转角度和速度,从而间接精确控制门体的位置。这对于需要停在中间位置的高级应用很有用。
通信接口:
这是实现自动化控制的关键,负责与外部系统(如机器人、中央调度系统)进行数据交换。
- 基本电气控制逻辑
即使在没有复杂通信的情况下,最基本的控制原理也遵循以下逻辑(以开门为例):
触发信号: 控制器接收到一个"开门"的数字信号(通常为24VDC)。
逻辑判断: 控制器检查安全条件(如无急停信号、防撞传感器未被触发)。
执行动作: 如果条件满足,控制器向电机驱动器发送"正转"信号。
运行监控: 门体开始上升,控制器实时监控电机电流(防堵转)和传感器信号。
停止动作: 当上限位开关被触发时,控制器立即撤销"正转"信号,电机停止,门停在完全打开位置。
状态反馈: 控制器同时会输出一个"门已全开"的数字信号。
关门过程与之类似,由"关门"信号触发,由下限位开关停止。
二、 通信协议
在机器人充电房这种自动化场景中,硬接线(DI/DO点)的方式虽然可靠,但布线复杂,信息量少。因此,工业现场总线或工业以太网协议是更主流和先进的选择。
- 常用协议
PROFINET: 在西门子等欧系设备中占主导地位,高性能,实时性强。
EtherCAT: 倍福等公司推广,以其极高的同步性能和带宽利用率著称。
EtherNet/IP: 在罗克韦尔等美系设备中常见,基于标准的以太网和TCP/IP协议。
Modbus TCP: 一种简单、开放、广泛支持的协议。如果设备厂商不一,Modbus TCP是一个很好的通用选择。
IO-Link: 用于连接传感器和执行器的点对点串行通信协议,可以传输更丰富的诊断信息(如传感器寿命、温度等),但通常作为设备层协议,再通过主站接入上述网络。 - 协议的作用
这些协议使得门控制器可以作为一个网络节点存在。通过协议,可以实现:
控制命令传输: 机器人或上位机可以向门控制器的特定存储地址写入一个值(例如,写入1表示"开门")。
状态信息读取: 机器人或上位机可以从门控制器读取存储地址的值,以获取门的状态(例如,1=全开,2=全闭,3=运行中,4=故障,5=急停)。
参数配置与诊断: 可以远程设置参数(如开关门速度)和读取详细的诊断信息(如电机过热、通信中断)。
三、 完整工作流程
假设一个典型的场景:机器人需要返回充电房进行自动充电。
参与角色:
机器人
卷帘门控制系统(包括控制器、电机、传感器)
车队管理系统/上位机(可选,在复杂系统中协调多个机器人和门)
流程详解:
阶段一:请求开门
任务触发: 机器人的电池电量低于阈值,或接收到调度中心的充电指令。
路径规划与接近: 机器人规划路径,导航至指定的充电房门口,在门前安全距离外(如1-2米)停下。
身份认证与请求(可选但推荐): 机器人通过无线网络向车队管理系统发送消息:"我是Robot_001,电量低,请求进入充电房001"。这一步是为了避免冲突,由中央系统统一调度。
发送开门指令:
方式A(通过调度系统): 车队管理系统确认充电房001空闲,并向卷帘门控制器发送"开门"指令(通过PROFINET/EtherCAT等协议)。
方式B(直接通信): 机器人通过自身的IO模块或通信接口,直接给门控制器一个"开门"信号(可以是硬接线,也可以是网络指令)。直接通信方式更简单,但缺乏中央调度,容易冲突。
门系统响应:
门控制器收到指令。
执行安全自检:检查急停按钮是否按下、防撞传感器是否被触发。
如果安全,控制器启动电机,卷帘门开始上升。
阶段二:通行与关门
门状态确认: 机器人通过自身的传感器(如激光雷达、摄像头)或通过读取网络上门控制器的状态字,实时监测门的状态。
安全进入: 当机器人检测到门已完全打开(通过读取到"门全开"状态信号,或视觉确认),并确认门下无障碍后,启动进入充电房。
机器人就位: 机器人行驶到房内指定的充电桩位置,并开始对接充电。
发送关门指令:
机器人就位后,向车队管理系统或直接向门控制器发送"我已就位,请求关门"的信号。
关门执行:
门控制器收到关门指令。
再次进行安全自检,特别是启动关门前的瞬间,会持续扫描防撞传感器。
启动电机,卷帘门开始下降。
在下降过程中,如果防撞传感器检测到任何物体,会立即停止关门并反向开启一小段距离,然后重试或报故障。
关门确认: 门体下降到底部,触发下限位开关,电机停止。门控制器将状态更新为"门已全闭",并通过网络上报。
阶段三:充电完成与离开
充电完成: 机器人电池充满。
请求开门离开: 机器人向系统发送"充电完成,请求开门离开"的指令。
开门与离开: 流程与阶段一类似。门打开,机器人驶出充电房。
自动关门: 在机器人完全离开后,系统自动触发关门流程,确保充电房保持关闭和安全。
总结
这种设计确保了整个过程无需人工干预,实现了机器人与基础设施之间的无缝、安全协作,是智能仓储、无人工厂等场景下的关键技术环节。