背景意义
随着计算机视觉技术的迅猛发展,图像分割在体育分析、场景理解等领域的应用愈发广泛。足球作为全球最受欢迎的运动之一,其比赛分析、战术研究和运动员表现评估都离不开对比赛场地及球员动态的精准捕捉与分析。因此,基于深度学习的图像分割技术在足球场景中的应用具有重要的研究价值和实际意义。尤其是YOLO(You Only Look Once)系列模型,以其高效的实时检测能力和较强的准确性,成为了目标检测和分割领域的热门选择。
本研究旨在基于改进的YOLOv11模型,构建一个针对足球场地区域的图像分割系统。我们将利用包含661幅图像的"football boxes"数据集,该数据集涵盖了足球场上多个关键区域的标注,包括18码区、5码区、上下半场中央圈等。通过对这些区域的精确分割,能够为教练和分析师提供更加细致的战术分析工具,帮助他们更好地理解比赛动态,优化战术安排。
在现有的图像分割技术中,尽管已有多种模型在不同场景下取得了良好的效果,但针对足球场景的特定需求,仍存在许多挑战。例如,复杂的场地背景、不同光照条件下的图像质量以及球员与场地之间的动态交互等,都对模型的分割精度提出了更高的要求。因此,改进YOLOv11模型以适应这些特定场景,将有助于提升分割效果,进而推动足球比赛分析的智能化进程。
综上所述,本研究不仅具有重要的理论意义,还将为实际应用提供强有力的技术支持,推动体育数据分析的智能化和自动化发展,为足球运动的科学训练和战术研究提供新的视角和工具。
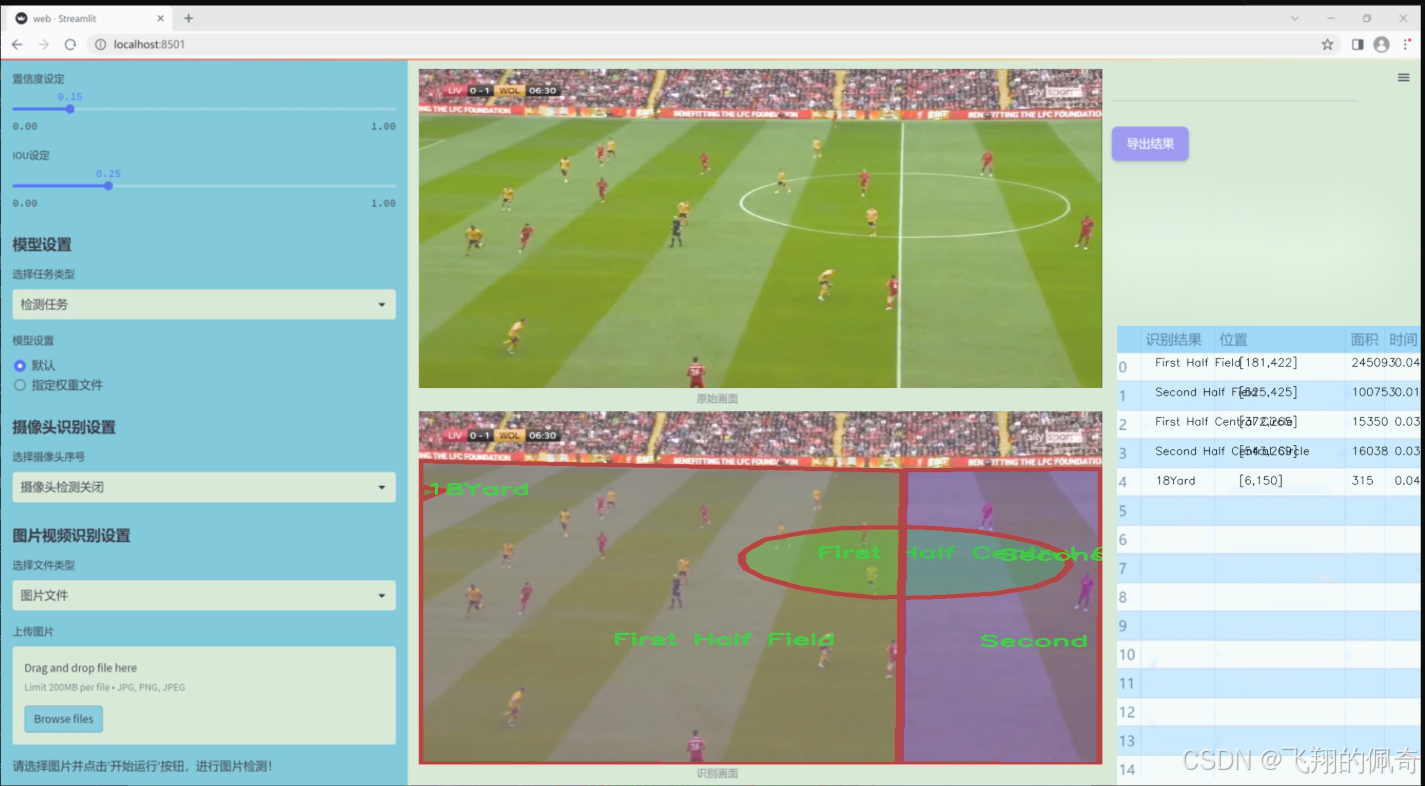
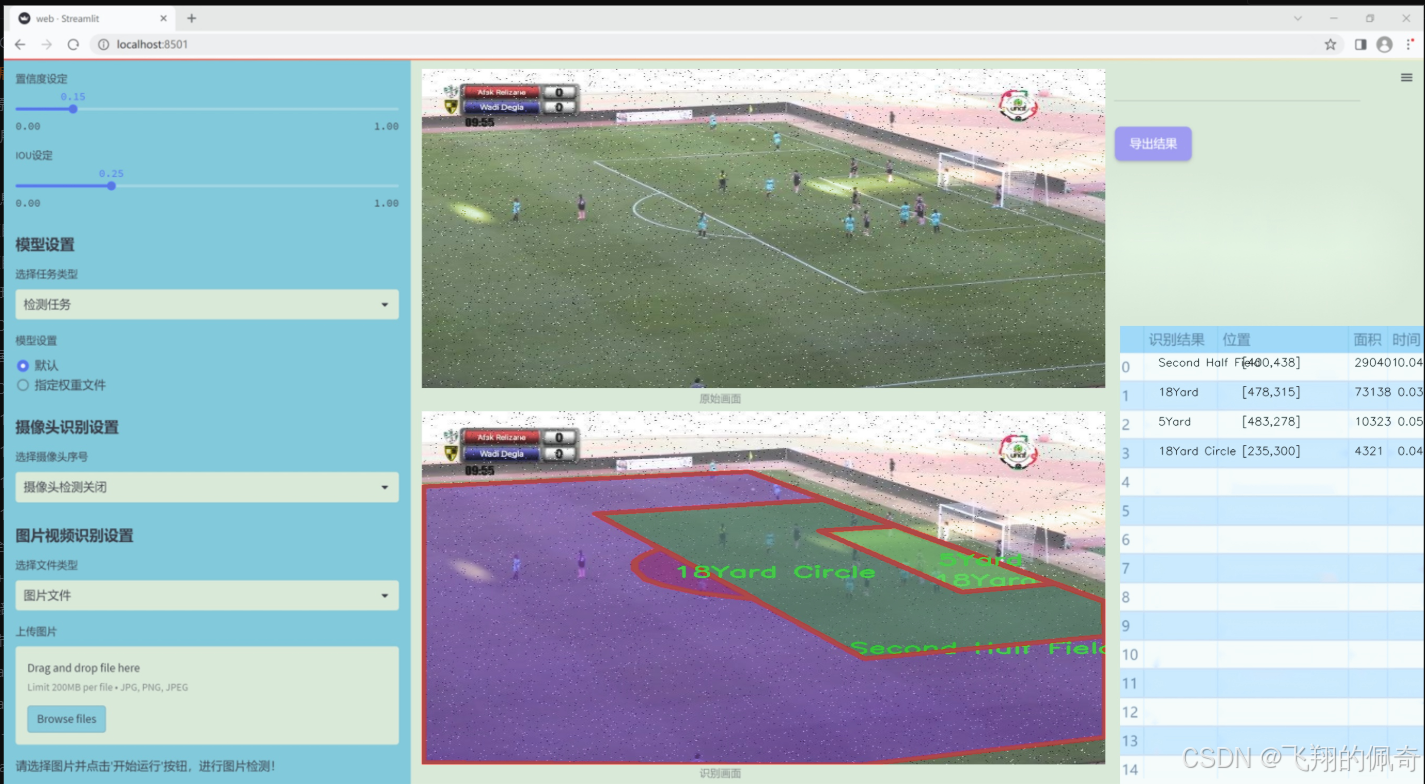
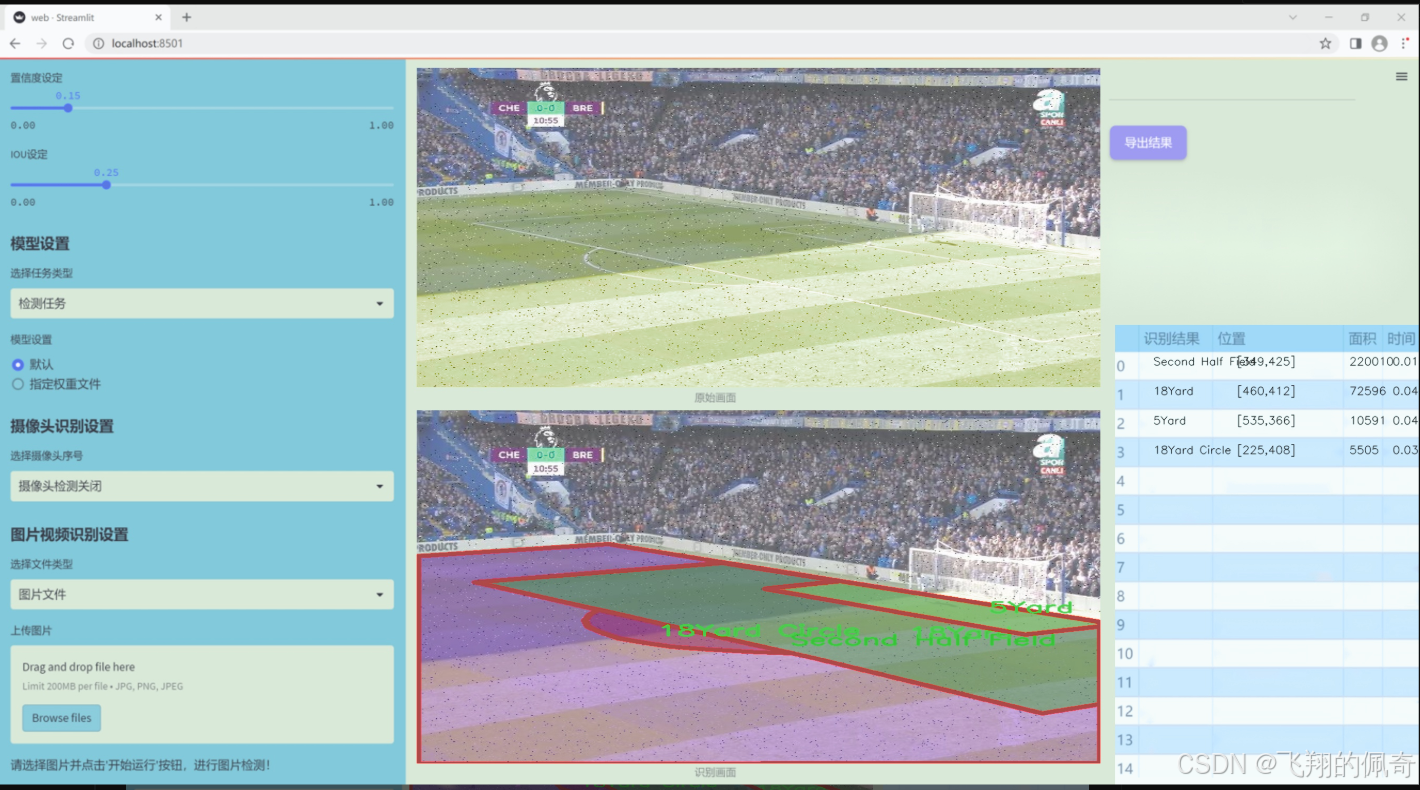
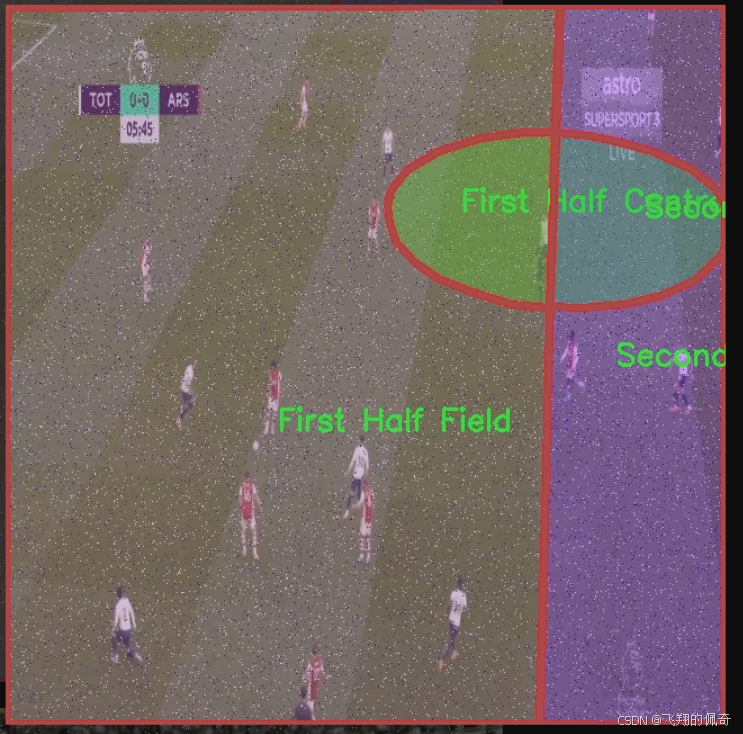
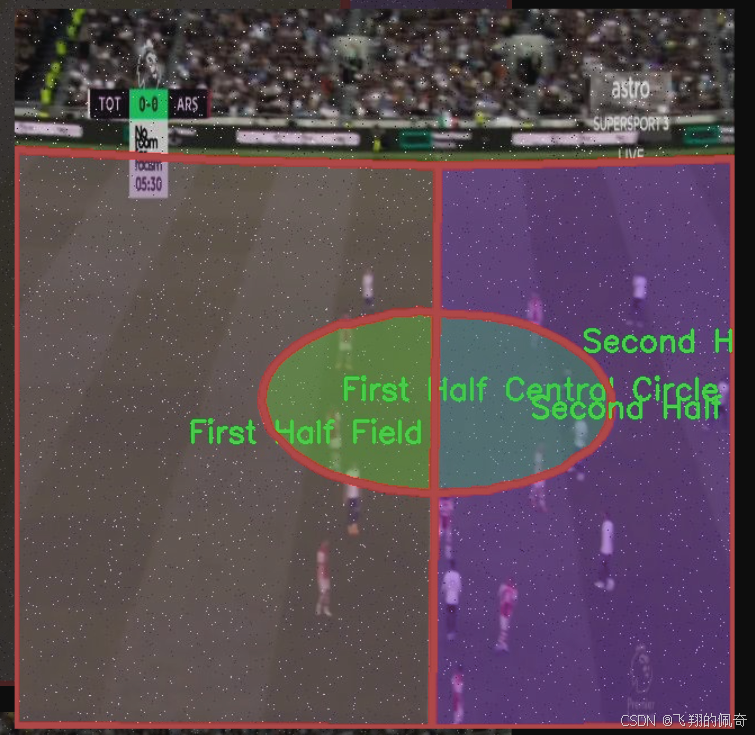
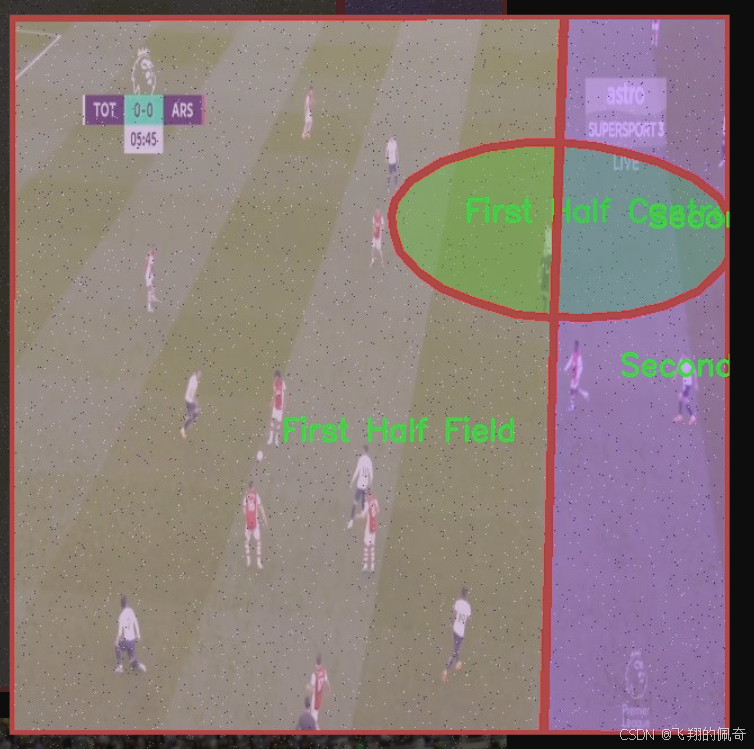
图片效果
数据集信息
本项目所使用的数据集名为"football boxes",旨在为改进YOLOv11的足球场地区域图像分割系统提供支持。该数据集包含七个类别,分别为"18Yard Circle"、"18Yard"、"5Yard"、"First Half Central Circle"、"First Half Field"、"Second Half Central Circle"和"Second Half Field"。这些类别涵盖了足球场上不同的关键区域,为模型的训练提供了丰富的样本和多样化的场景。
"football boxes"数据集的设计充分考虑了足球比赛的特点,确保能够有效捕捉到场地的各个重要部分。每个类别都代表了足球场上特定的区域,这些区域在比赛中具有重要的战术意义。例如,"18Yard Circle"和"18Yard"分别对应于禁区和其周边区域,这些区域在进攻和防守中都至关重要;而"5Yard"则标识了球场上的短距离区域,通常涉及快速传球和战术配合。
此外,数据集中还包括了"First Half Central Circle"和"Second Half Central Circle",这两个类别标识了比赛上下半场的中心圈,能够帮助模型理解比赛的节奏和场上动态变化。而"First Half Field"和"Second Half Field"则提供了整个场地的分割信息,使得模型能够在不同的比赛阶段中进行准确的区域识别。
通过对"football boxes"数据集的训练,改进后的YOLOv11将能够更好地识别和分割足球场上的各个关键区域,从而提升其在实际应用中的表现。该数据集不仅为模型提供了必要的训练数据,还为后续的模型评估和优化奠定了基础,确保能够在复杂的足球场景中实现高效的图像分割。


核心代码
以下是对给定代码的核心部分进行分析和详细注释的结果。为了简化和突出重点,我将保留最重要的类和函数,并对其进行中文注释。
import torch
import torch.nn as nn
from einops import rearrange
from timm.layers import DropPath
自定义的2D层归一化
class LayerNorm2d(nn.Module):
def init (self, normalized_shape, eps=1e-6, elementwise_affine=True):
super().init ()
self.norm = nn.LayerNorm(normalized_shape, eps, elementwise_affine)
def forward(self, x):
# 将输入张量的形状从 (B, C, H, W) 转换为 (B, H, W, C)
x = rearrange(x, 'b c h w -> b h w c').contiguous()
x = self.norm(x) # 应用层归一化
# 再将形状转换回 (B, C, H, W)
x = rearrange(x, 'b h w c -> b c h w').contiguous()
return x跨扫描操作
class CrossScan(torch.autograd.Function):
@staticmethod
def forward(ctx, x: torch.Tensor):
B, C, H, W = x.shape
ctx.shape = (B, C, H, W)
xs = x.new_empty((B, 4, C, H * W)) # 创建一个新的张量
xs:, 0 = x.flatten(2, 3) # 将输入展平
xs:, 1 = x.transpose(dim0=2, dim1=3).flatten(2, 3) # 转置并展平
xs:, 2:4 = torch.flip(xs:, 0:2, dims=-1) # 翻转
return xs
@staticmethod
def backward(ctx, ys: torch.Tensor):
B, C, H, W = ctx.shape
L = H * W
ys = ys[:, 0:2] + ys[:, 2:4].flip(dims=[-1]).view(B, 2, -1, L)
y = ys[:, 0] + ys[:, 1].view(B, -1, W, H).transpose(dim0=2, dim1=3).contiguous().view(B, -1, L)
return y.view(B, -1, H, W)选择性扫描核心
class SelectiveScanCore(torch.autograd.Function):
@staticmethod
@torch.cuda.amp.custom_fwd
def forward(ctx, u, delta, A, B, C, D=None, delta_bias=None, delta_softplus=False, nrows=1, backnrows=1):
if u.stride(-1) != 1:
u = u.contiguous()
if delta.stride(-1) != 1:
delta = delta.contiguous()
if D is not None and D.stride(-1) != 1:
D = D.contiguous()
if B.stride(-1) != 1:
B = B.contiguous()
if C.stride(-1) != 1:
C = C.contiguous()
if B.dim() == 3:
B = B.unsqueeze(dim=1)
ctx.squeeze_B = True
if C.dim() == 3:
C = C.unsqueeze(dim=1)
ctx.squeeze_C = True
ctx.delta_softplus = delta_softplus
ctx.backnrows = backnrows
out, x, *rest = selective_scan_cuda_core.fwd(u, delta, A, B, C, D, delta_bias, delta_softplus, 1)
ctx.save_for_backward(u, delta, A, B, C, D, delta_bias, x)
return out
@staticmethod
@torch.cuda.amp.custom_bwd
def backward(ctx, dout, *args):
u, delta, A, B, C, D, delta_bias, x = ctx.saved_tensors
if dout.stride(-1) != 1:
dout = dout.contiguous()
du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda_core.bwd(
u, delta, A, B, C, D, delta_bias, dout, x, ctx.delta_softplus, 1
)
return (du, ddelta, dA, dB, dC, dD, ddelta_bias, None, None, None, None)SSM模块
class SS2D(nn.Module):
def init (self, d_model=96, d_state=16, ssm_ratio=2.0, act_layer=nn.SiLU, dropout=0.0):
super().init ()
self.in_proj = nn.Conv2d(d_model, d_model * ssm_ratio, kernel_size=1) # 输入投影
self.out_proj = nn.Conv2d(d_model * ssm_ratio, d_model, kernel_size=1) # 输出投影
self.dropout = nn.Dropout(dropout) # Dropout层
self.act = act_layer() # 激活函数
def forward(self, x: torch.Tensor):
x = self.in_proj(x) # 投影
x = self.act(x) # 激活
x = self.dropout(x) # 应用Dropout
x = self.out_proj(x) # 输出投影
return x视觉线索合并模块
class VisionClueMerge(nn.Module):
def init (self, dim, out_dim):
super().init ()
self.pw_linear = nn.Sequential(
nn.Conv2d(dim * 4, out_dim, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(out_dim),
nn.SiLU()
)
def forward(self, x):
# 将输入张量的四个部分拼接在一起
y = torch.cat([
x[..., ::2, ::2],
x[..., 1::2, ::2],
x[..., ::2, 1::2],
x[..., 1::2, 1::2]
], dim=1)
return self.pw_linear(y) # 通过线性层YOLO版本的VSSBlock
class VSSBlock_YOLO(nn.Module):
def init (self, in_channels: int, hidden_dim: int, drop_path: float):
super().init ()
self.proj_conv = nn.Conv2d(in_channels, hidden_dim, kernel_size=1) # 投影卷积
self.ss2d = SS2D(d_model=hidden_dim) # SSM模块
self.drop_path = DropPath(drop_path) # DropPath层
def forward(self, input: torch.Tensor):
input = self.proj_conv(input) # 投影
x = self.ss2d(input) # SSM处理
return self.drop_path(x) # 应用DropPath简单的Stem模块
class SimpleStem(nn.Module):
def init (self, inp, embed_dim, ks=3):
super().init ()
self.conv = nn.Sequential(
nn.Conv2d(inp, embed_dim // 2, kernel_size=ks, stride=2, padding=ks // 2, bias=False),
nn.BatchNorm2d(embed_dim // 2),
nn.GELU(),
nn.Conv2d(embed_dim // 2, embed_dim, kernel_size=ks, stride=2, padding=ks // 2, bias=False),
nn.BatchNorm2d(embed_dim),
nn.SiLU(),
)
def forward(self, x):
return self.conv(x) # 通过卷积层代码分析总结
LayerNorm2d: 实现了2D层归一化,用于对图像数据进行归一化处理。
CrossScan: 实现了跨扫描操作,用于对输入张量进行多方向的处理。
SelectiveScanCore: 实现了选择性扫描的核心功能,支持前向和反向传播。
SS2D: 实现了SSM(状态空间模型)模块,主要用于特征的投影和激活。
VisionClueMerge: 实现了视觉线索合并模块,通过卷积将多个特征拼接在一起。
VSSBlock_YOLO: 实现了YOLO版本的VSSBlock,集成了投影卷积和SSM模块。
SimpleStem: 实现了一个简单的Stem模块,用于特征提取。
以上是对代码的核心部分的分析和注释,保留了最重要的功能和结构。
该文件 mamba_yolo.py 是一个用于实现 YOLO(You Only Look Once)目标检测模型的 PyTorch 代码。文件中包含了多个类和函数,主要用于构建神经网络的不同模块。以下是对文件中主要内容的逐步分析和说明。
首先,文件导入了一些必要的库,包括 PyTorch、数学库、以及用于张量操作的 einops 和 timm 库。然后,定义了一个 LayerNorm2d 类,用于对 2D 数据进行层归一化。该类的 forward 方法会对输入的张量进行维度重排,以适应 nn.LayerNorm 的要求。
接下来,定义了一个 autopad 函数,用于自动计算卷积操作的填充,使得输出形状与输入形状相同。之后,定义了 CrossScan 和 CrossMerge 类,这两个类是自定义的 PyTorch 自动求导函数,分别用于实现交叉扫描和交叉合并操作。
SelectiveScanCore 类实现了选择性扫描的核心功能,包含前向和反向传播的实现。选择性扫描是一种在序列数据中高效处理信息的方法,适用于时间序列或图像序列的处理。
cross_selective_scan 函数是一个封装函数,调用了 SelectiveScanCore 进行选择性扫描,并且可以选择性地对输出进行归一化处理。
SS2D 类是一个包含多个层的模块,使用了选择性扫描和其他卷积操作。该类的构造函数中定义了多个参数,包括模型的维度、状态维度、激活函数等。forward 方法实现了数据的前向传播过程。
RGBlock 和 LSBlock 类是两个基本的模块,分别实现了特定的卷积和激活操作,XSSBlock 类则是一个更复杂的模块,结合了选择性扫描和多层感知机(MLP)的结构。
VSSBlock_YOLO 类是 YOLO 模型的一个重要组成部分,结合了选择性扫描和其他模块,形成了完整的网络结构。SimpleStem 类用于实现网络的初始卷积层,负责将输入图像转换为特征图。
最后,VisionClueMerge 类用于将多个特征图合并,增强模型的特征表达能力。
总体而言,该文件实现了 YOLO 模型中的多个重要模块,利用选择性扫描和卷积操作来处理输入数据,构建出一个高效的目标检测网络。每个模块的设计都考虑到了性能和可扩展性,使得模型能够在不同的任务中灵活应用。
10.2 activation.py
import torch
import torch.nn as nn
class AGLU(nn.Module):
"""统一激活函数模块,来源于 https://github.com/kostas1515/AGLU。"""
def __init__(self, device=None, dtype=None) -> None:
"""初始化统一激活函数模块。"""
super().__init__()
# 使用Softplus作为基础激活函数,beta设置为-1.0
self.act = nn.Softplus(beta=-1.0)
# 初始化lambda参数,确保其在指定设备和数据类型上
self.lambd = nn.Parameter(nn.init.uniform_(torch.empty(1, device=device, dtype=dtype))) # lambda参数
# 初始化kappa参数,确保其在指定设备和数据类型上
self.kappa = nn.Parameter(nn.init.uniform_(torch.empty(1, device=device, dtype=dtype))) # kappa参数
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""计算统一激活函数的前向传播。"""
# 将lambda参数限制在最小值0.0001,避免出现负值或零
lam = torch.clamp(self.lambd, min=0.0001)
# 计算并返回激活值
return torch.exp((1 / lam) * self.act((self.kappa * x) - torch.log(lam)))代码注释说明:
导入模块:引入torch和torch.nn模块,后者提供了构建神经网络所需的基本组件。
AGLU类:定义了一个名为AGLU的类,继承自nn.Module,表示一个自定义的神经网络模块。
初始化方法:
__init__方法用于初始化类的实例。它调用父类的构造函数,并设置激活函数和参数。
self.act使用Softplus激活函数,beta参数设置为-1.0,影响激活函数的形状。
self.lambd和self.kappa是可学习的参数,分别初始化为均匀分布的随机值,并作为模型的参数进行优化。
前向传播方法:
forward方法定义了前向传播的计算过程,接受一个张量x作为输入。
使用torch.clamp将self.lambd限制在0.0001以上,以避免计算中的数值不稳定。
最后,计算并返回激活值,使用了指数函数和Softplus激活函数的组合。
这个程序文件名为 activation.py,主要定义了一个名为 AGLU 的激活函数模块,属于 Ultralytics YOLO 项目的一部分,并遵循 AGPL-3.0 许可证。
文件首先导入了 PyTorch 库及其神经网络模块。接着,定义了 AGLU 类,该类继承自 nn.Module,表示一个神经网络模块。
在 AGLU 类的初始化方法 init 中,首先调用了父类的初始化方法。然后,创建了一个 Softplus 激活函数实例,设置其参数 beta 为 -1.0。接下来,定义了两个可学习的参数 lambd 和 kappa,这两个参数使用均匀分布初始化,并且可以在指定的设备和数据类型上进行初始化。
forward 方法实现了前向传播的计算。在这个方法中,首先对 lambd 参数进行限制,确保其最小值为 0.0001,以避免在后续计算中出现数值不稳定的情况。然后,使用 Softplus 激活函数对输入 x 进行处理,并结合 lambd 和 kappa 参数进行计算,最终返回激活后的结果。
整体来看,这个模块实现了一种新的激活函数,结合了可学习的参数,旨在提高神经网络的表现。
10.3 dynamic_snake_conv.py
以下是经过简化和注释的核心代码部分:
import torch
import torch.nn as nn
class DySnakeConv(nn.Module):
def init (self, inc, ouc, k=3) -> None:
super().init ()
初始化三个卷积层
self.conv_0 = Conv(inc, ouc, k) # 标准卷积
self.conv_x = DSConv(inc, ouc, 0, k) # 沿x轴的动态蛇形卷积
self.conv_y = DSConv(inc, ouc, 1, k) # 沿y轴的动态蛇形卷积
def forward(self, x):
# 前向传播,返回三个卷积的拼接结果
return torch.cat([self.conv_0(x), self.conv_x(x), self.conv_y(x)], dim=1)class DSConv(nn.Module):
def init (self, in_ch, out_ch, morph, kernel_size=3, if_offset=True, extend_scope=1):
super(DSConv, self).init ()
用于学习可变形偏移的卷积层
self.offset_conv = nn.Conv2d(in_ch, 2 * kernel_size, 3, padding=1)
self.bn = nn.BatchNorm2d(2 * kernel_size) # 批归一化
self.kernel_size = kernel_size
# 定义沿x轴和y轴的动态蛇形卷积
self.dsc_conv_x = nn.Conv2d(in_ch, out_ch, kernel_size=(kernel_size, 1), stride=(kernel_size, 1), padding=0)
self.dsc_conv_y = nn.Conv2d(in_ch, out_ch, kernel_size=(1, kernel_size), stride=(1, kernel_size), padding=0)
self.extend_scope = extend_scope
self.morph = morph
self.if_offset = if_offset
def forward(self, f):
# 前向传播
offset = self.offset_conv(f) # 计算偏移
offset = self.bn(offset) # 批归一化
offset = torch.tanh(offset) # 将偏移限制在[-1, 1]之间
# 进行可变形卷积
dsc = DSC(f.shape, self.kernel_size, self.extend_scope, self.morph)
deformed_feature = dsc.deform_conv(f, offset, self.if_offset)
# 根据形态选择对应的卷积操作
if self.morph == 0:
x = self.dsc_conv_x(deformed_feature.type(f.dtype))
else:
x = self.dsc_conv_y(deformed_feature.type(f.dtype))
return xclass DSC(object):
def init (self, input_shape, kernel_size, extend_scope, morph):
self.num_points = kernel_size
self.width = input_shape2
self.height = input_shape3
self.morph = morph
self.extend_scope = extend_scope
# 定义特征图的形状
self.num_batch = input_shape[0]
self.num_channels = input_shape[1]
def _coordinate_map_3D(self, offset, if_offset):
# 计算坐标映射
device = offset.device
y_offset, x_offset = torch.split(offset, self.num_points, dim=1)
# 生成中心坐标
y_center = torch.arange(0, self.width).repeat([self.height]).reshape(self.height, self.width).permute(1, 0).reshape([-1, self.width, self.height]).repeat([self.num_points, 1, 1]).float().unsqueeze(0)
x_center = torch.arange(0, self.height).repeat([self.width]).reshape(self.width, self.height).permute(0, 1).reshape([-1, self.width, self.height]).repeat([self.num_points, 1, 1]).float().unsqueeze(0)
# 根据形态生成新的坐标
if self.morph == 0:
y = torch.linspace(0, 0, 1)
x = torch.linspace(-int(self.num_points // 2), int(self.num_points // 2), int(self.num_points))
else:
y = torch.linspace(-int(self.num_points // 2), int(self.num_points // 2), int(self.num_points))
x = torch.linspace(0, 0, 1)
y_new = y_center + y.unsqueeze(0).repeat(self.num_batch, 1, 1, 1)
x_new = x_center + x.unsqueeze(0).repeat(self.num_batch, 1, 1, 1)
return y_new, x_new
def _bilinear_interpolate_3D(self, input_feature, y, x):
# 双线性插值
# 省略具体实现,保持原有逻辑
pass
def deform_conv(self, input, offset, if_offset):
# 进行可变形卷积
y, x = self._coordinate_map_3D(offset, if_offset)
deformed_feature = self._bilinear_interpolate_3D(input, y, x)
return deformed_feature代码注释说明:
DySnakeConv 类:实现了一个动态蛇形卷积层,包含三个卷积操作,分别是标准卷积和两个方向的动态蛇形卷积。
DSConv 类:实现了动态蛇形卷积的具体逻辑,包括偏移的学习和特征图的变形。
DSC 类:负责生成坐标映射和进行双线性插值,核心功能是实现可变形卷积的具体计算。
前向传播:每个类的 forward 方法定义了数据如何通过网络流动,并在 DSConv 中实现了可变形卷积的逻辑。
这个程序文件 dynamic_snake_conv.py 实现了一个动态蛇形卷积(Dynamic Snake Convolution)的神经网络模块,主要用于图像处理任务。文件中包含两个主要的类:DySnakeConv 和 DSConv,以及一个辅助类 DSC。
在 DySnakeConv 类中,构造函数初始化了三个卷积层:conv_0、conv_x 和 conv_y。其中,conv_0 是一个标准卷积层,而 conv_x 和 conv_y 是动态蛇形卷积的变体,分别沿着 x 轴和 y 轴进行操作。forward 方法接收输入张量 x,并将三个卷积层的输出在通道维度上进行拼接,形成最终的输出。
DSConv 类实现了动态蛇形卷积的核心逻辑。构造函数中定义了多个参数,包括输入和输出通道数、卷积核大小、形态学类型(x 轴或 y 轴)、是否使用偏移量等。该类的 forward 方法首先通过 offset_conv 计算出偏移量,然后使用 DSC 类来进行变形卷积。根据形态学类型的不同,分别调用不同的卷积层进行处理,并经过归一化和激活函数处理后返回结果。
DSC 类负责生成坐标映射和进行双线性插值。它的 _coordinate_map_3D 方法根据输入的偏移量生成新的坐标,支持动态变形的卷积核。_bilinear_interpolate_3D 方法则实现了双线性插值,能够根据新的坐标对输入特征图进行采样,得到变形后的特征图。
整体来看,这个程序文件实现了一个灵活且高效的卷积模块,能够通过动态调整卷积核的位置和形状来更好地适应输入数据的特征,从而提升模型在图像处理任务中的表现。
10.4 test_selective_scan_speed.py
以下是经过简化并保留核心部分的代码,同时添加了详细的中文注释:
import torch
import torch.nn.functional as F
def build_selective_scan_fn(selective_scan_cuda: object = None, mode="mamba_ssm"):
"""
构建选择性扫描函数
:param selective_scan_cuda: CUDA实现的选择性扫描函数
:param mode: 模式选择
:return: 选择性扫描函数
"""
class SelectiveScanFn(torch.autograd.Function):
@staticmethod
def forward(ctx, u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False, return_last_state=False):
"""
前向传播
:param ctx: 上下文对象,用于保存状态
:param u: 输入张量
:param delta: 变化率张量
:param A, B, C: 参数张量
:param D: 可选的额外参数
:param z: 可选的状态张量
:param delta_bias: 可选的偏置
:param delta_softplus: 是否使用softplus激活
:param return_last_state: 是否返回最后状态
:return: 输出张量或(输出张量, 最后状态)
"""
# 确保输入张量是连续的
if u.stride(-1) != 1:
u = u.contiguous()
if delta.stride(-1) != 1:
delta = delta.contiguous()
if D is not None:
D = D.contiguous()
if B.stride(-1) != 1:
B = B.contiguous()
if C.stride(-1) != 1:
C = C.contiguous()
if z is not None and z.stride(-1) != 1:
z = z.contiguous()
# 调用CUDA实现的前向函数
out, x, *rest = selective_scan_cuda.fwd(u, delta, A, B, C, D, z, delta_bias, delta_softplus)
# 保存状态以供反向传播使用
ctx.save_for_backward(u, delta, A, B, C, D, z, delta_bias, x)
last_state = x[:, :, -1, 1::2] # 获取最后状态
return out if not return_last_state else (out, last_state)
@staticmethod
def backward(ctx, dout):
"""
反向传播
:param ctx: 上下文对象
:param dout: 输出的梯度
:return: 输入的梯度
"""
u, delta, A, B, C, D, z, delta_bias, x = ctx.saved_tensors
# 调用CUDA实现的反向函数
du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda.bwd(
u, delta, A, B, C, D, z, delta_bias, dout, x
)
return (du, ddelta, dA, dB, dC, dD, None, ddelta_bias, None)
def selective_scan_fn(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False, return_last_state=False):
"""
封装选择性扫描函数
"""
return SelectiveScanFn.apply(u, delta, A, B, C, D, z, delta_bias, delta_softplus, return_last_state)
return selective_scan_fn选择性扫描的参考实现
def selective_scan_ref(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False, return_last_state=False):
"""
选择性扫描的参考实现
:param u: 输入张量
:param delta: 变化率张量
:param A, B, C: 参数张量
:param D: 可选的额外参数
:param z: 可选的状态张量
:param delta_bias: 可选的偏置
:param delta_softplus: 是否使用softplus激活
:param return_last_state: 是否返回最后状态
:return: 输出张量或(输出张量, 最后状态)
"""
将输入转换为浮点数
u = u.float()
delta = delta.float()
if delta_bias is not None:
delta = delta + delta_bias..., None.float()
if delta_softplus:
delta = F.softplus(delta)
# 初始化状态
batch, dim, dstate = u.shape[0], A.shape[0], A.shape[1]
x = A.new_zeros((batch, dim, dstate))
ys = []
# 计算选择性扫描
for i in range(u.shape[2]):
x = delta[:, :, i] * x + B[:, :, i] # 更新状态
y = torch.einsum('bdn,dn->bd', x, C) # 计算输出
ys.append(y)
y = torch.stack(ys, dim=2) # 堆叠输出
return y if not return_last_state else (y, x)示例调用
selective_scan_fn = build_selective_scan_fn(selective_scan_cuda=None)
代码说明:
构建选择性扫描函数:build_selective_scan_fn函数创建一个选择性扫描的自定义PyTorch函数,包含前向和反向传播的实现。
前向传播:在forward方法中,输入张量被处理并传递给CUDA实现的前向函数,结果被保存以供反向传播使用。
反向传播:在backward方法中,计算梯度并返回。
参考实现:selective_scan_ref提供了选择性扫描的参考实现,用于验证CUDA实现的正确性。
此代码的核心部分是选择性扫描的实现,适用于深度学习中的序列建模任务。
这个程序文件 test_selective_scan_speed.py 主要用于实现和测试选择性扫描(Selective Scan)算法的速度和性能。文件中包含多个函数和类,使用了 PyTorch 库来进行张量运算,并利用 CUDA 加速计算。以下是对文件中主要部分的详细说明。
首先,程序导入了必要的库,包括 torch、torch.nn.functional、pytest 和其他一些工具库。接着定义了一个 build_selective_scan_fn 函数,该函数用于构建一个选择性扫描的自定义 PyTorch 函数。这个函数的输入参数包括 CUDA 实现的选择性扫描函数、模式和标签等。
在 build_selective_scan_fn 函数内部,定义了一个名为 SelectiveScanFn 的类,该类继承自 torch.autograd.Function。这个类实现了前向传播和反向传播的逻辑。前向传播方法 forward 接收多个输入参数,并进行一系列的张量维度检查和处理。根据不同的模式(如 "mamba_ssm"、"sscore" 等),调用相应的 CUDA 实现进行计算,并保存必要的中间结果以供反向传播使用。
反向传播方法 backward 则根据前向传播中保存的上下文信息计算梯度,并返回各个输入参数的梯度。这里的实现考虑了多种情况,包括是否存在额外的输入(如 z 和 delta_bias)以及不同的数据类型。
接下来,定义了多个选择性扫描的参考实现函数,如 selective_scan_ref、selective_scan_easy_v2 和 selective_scan_easy。这些函数实现了选择性扫描的具体算法逻辑,处理输入的张量并返回相应的输出。
在文件的最后部分,定义了一个 test_speed 函数,该函数用于测试不同选择性扫描实现的速度。通过设置不同的参数(如批大小、序列长度、维度等),生成随机输入数据,并调用之前定义的选择性扫描函数进行多次测试。测试结果包括前向传播和反向传播的时间消耗,最后将结果打印出来。
总体来说,这个程序文件实现了选择性扫描算法的高效计算,并通过多种方式进行性能测试,以便在实际应用中选择最佳的实现方案。
源码文件

源码获取
欢迎大家点赞、收藏、关注、评论 啦 、查看👇🏻获取联系方式👇🏻