- 电梯智能控制系统集成的技术要求和安全规范
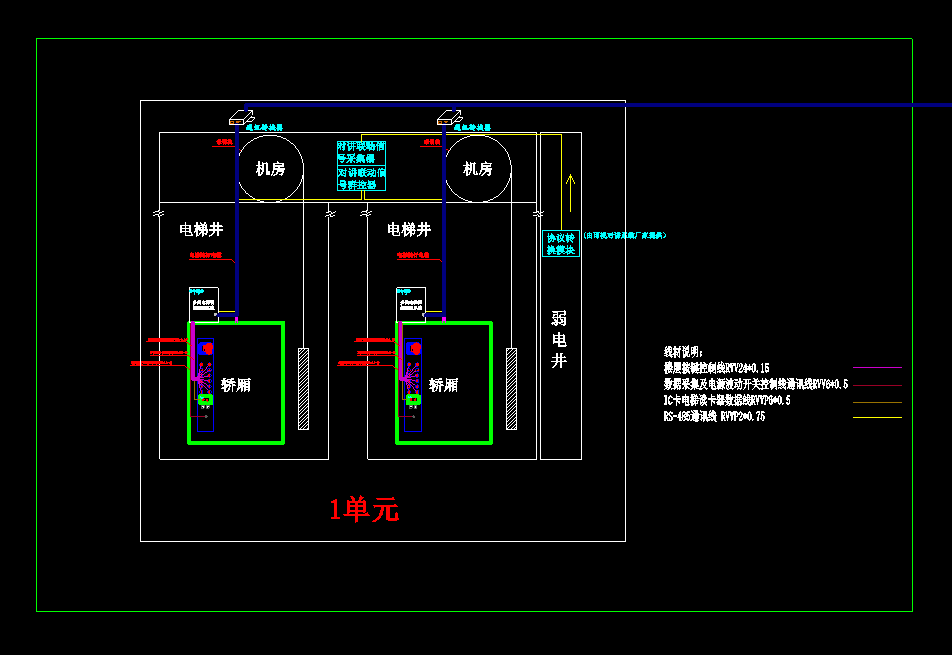
- 电梯机房和轿厢顶部设备安装的技术要点和空间限制
- 了解电梯信号线接入和通讯协议的技术标准
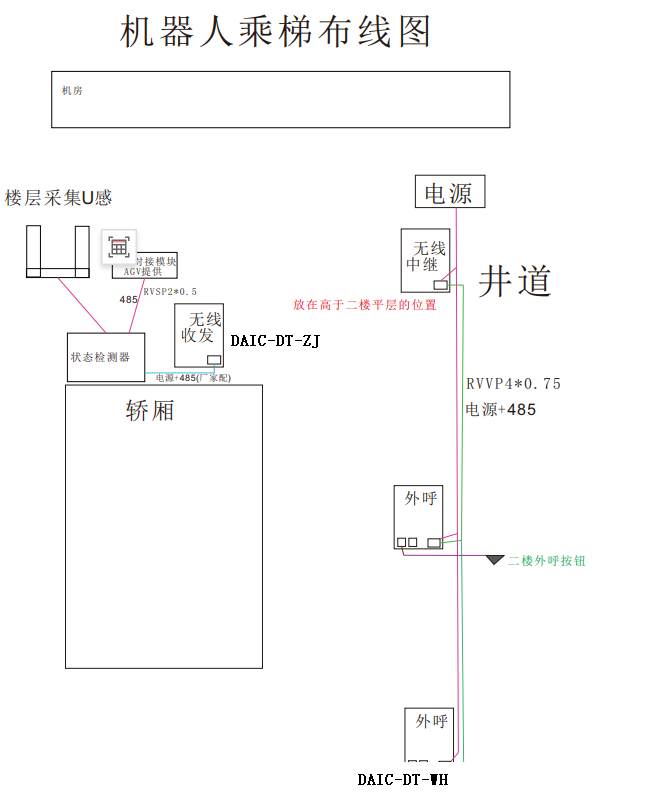
- 查询智能电梯系统与第三方设备(如AGV/AMR机器人)的接口规范
- 探索电梯节能模式下电源供应的技术解决方案
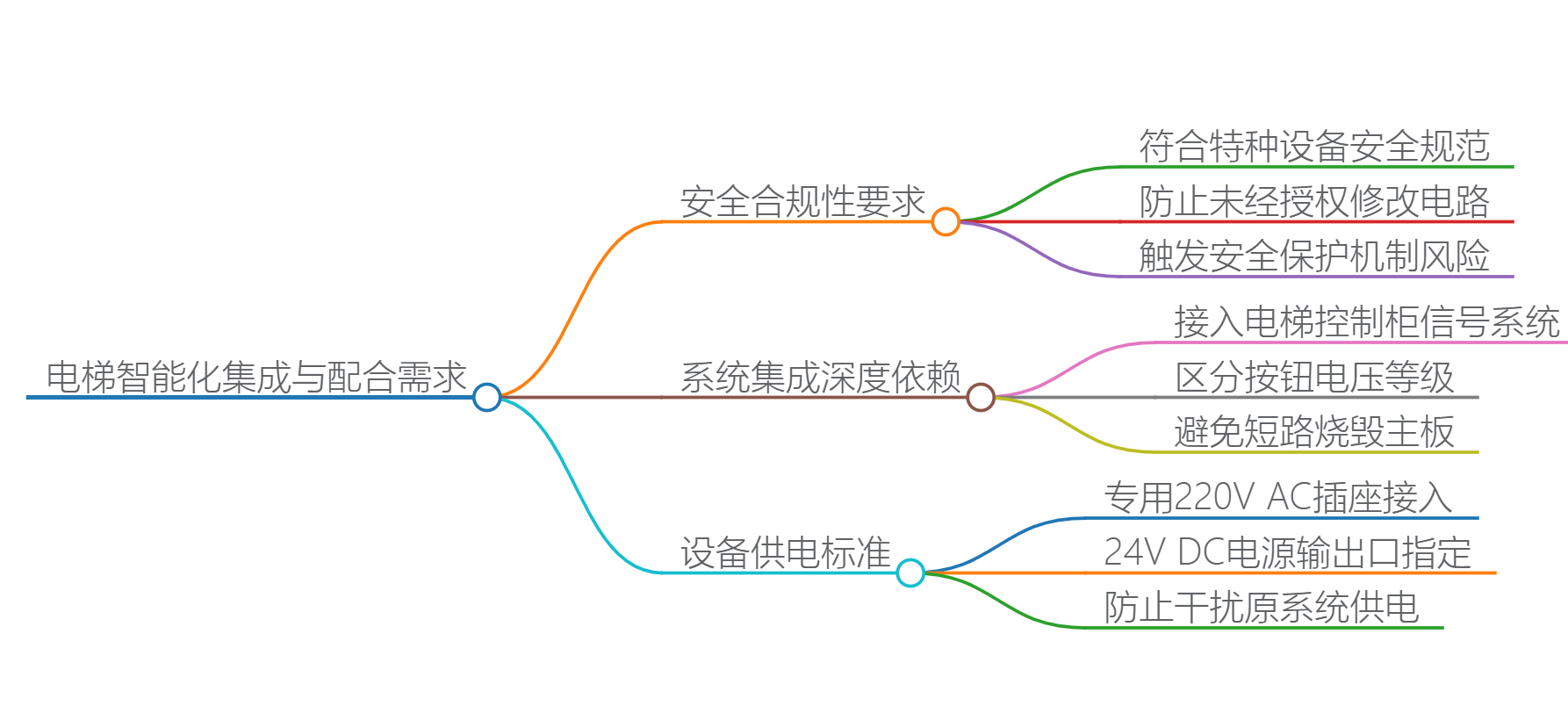
一、核心原因分析
-
安全合规性要求
-
电梯属于特种设备,任何改装均需符合《特种设备安全技术规范》(TSG T7001)。
-
未经授权修改电路可能触发安全保护机制(如急停),甚至导致电梯脱检。
-
-
系统集成深度依赖电梯底层接口
-
梯控设备需直接接入电梯控制柜的信号系统(如按键线路、消防信号、通讯总线)。
-
例如:截取电梯按键信号线时,需区分按钮电压等级(通常为12-36V DC/AC),避免短路烧毁主板。
-
-
设备供电需符合电梯电源标准
- 电梯控制柜提供专用220V AC插座或24V DC电源输出口,需由电梯人员指定接入点,防止干扰原系统供电。
-
机器人乘梯的特殊协议对接
- AGV/AMR需通过电梯群控系统(如MODBUS、CAN总线)发送召梯指令,需电梯公司开放通信协议并调试接口。

- AGV/AMR需通过电梯群控系统(如MODBUS、CAN总线)发送召梯指令,需电梯公司开放通信协议并调试接口。
二、电梯公司人员配合的具体任务
(1) 电源供应保障
-
电源接入:在电梯控制柜内指定安全取电点,为梯控主板(如DAIC-TK-MB)、人脸识别机等设备供电。
-
电压匹配:验证电梯按键电压(通常为低压直流/交流),确保梯控设备兼容性。
(2) 设备安装与调试
| 设备类型 | 安装位置 | 电梯人员配合内容 |
|---|---|---|
| 梯控主板 | 电梯控制柜 | 固定安装、电源接入、通讯线接入 |
| IC卡/二维码读头 | 轿厢操作面板 | 开孔定位、面板拆卸与复原 |
| AI人脸识别机 | 轿厢内壁 | 供电走线、角度校准(避免遮挡电梯按钮) |
| 机器人乘梯接口模块 | 控制柜或外召面板 | 通信协议配置、信号干扰测试 |
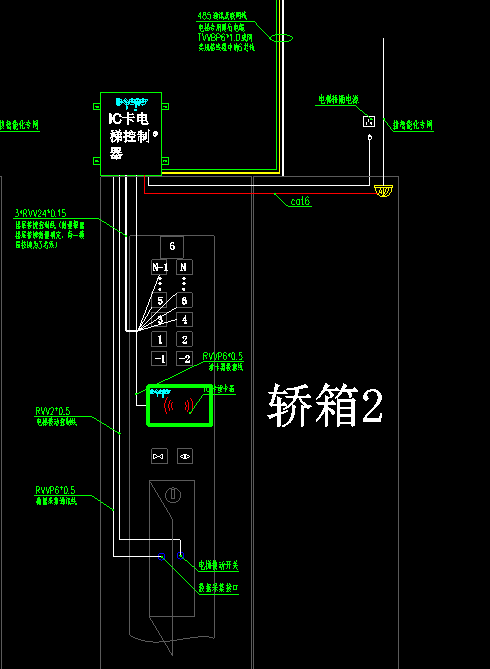
(3) 电梯信号线截取与接入
-
按键信号线截取 :
电梯人员需定位目标楼层的按键线路(如8楼按钮线),使用 免破线接头(DAIC-TK-ZJ) 并联接入梯控主板,实现"点亮楼层"功能。
-
消防信号联动 :
将电梯消防干接点信号线接入梯控主板,确保火灾时自动解除门禁控制。
(4) 通信系统集成
-
群控对接:为机器人(AGV/AMR)配置专用外召按钮或开放通信协议(如RS-485),实现跨楼层自主召梯。
-
对讲联动:调试梯控主板与楼宇对讲系统的信号交互(如访客呼梯后自动开放住户楼层)。
(5) 安全功能验证
-
脱离机制测试:触发消防信号或使用脱离卡,验证电梯是否恢复原始状态。
-
故障自检联动:模拟断电/设备故障,确保电梯自动脱离门禁控制。
下表具体说明了在每个环节中,电梯专业人员不可替代的作用:
| 您提出的要求 | 为何需要电梯人员配合 | 不配合的风险 |
|---|---|---|
| 1. 提供220V电源 | 电梯轿顶的AC220V电源取电点不是任意的。电梯人员知道从哪里取电最稳定 ,且能避开电梯的节能模式(该模式可能会间歇性断电导致梯控系统重启),同时确保取电操作不影响电梯主机的动力电源。 | 随意取电可能导致梯控系统工作不稳定、频繁重启,甚至可能因短路而影响电梯正常运行。 |
| 2. 设备安装位置与图纸 | 轿顶的承重、空间、散热、防震都有严格要求。电梯人员提供的图纸能明确承重结构 和安全区域,确保梯控主箱体(350mm×350mm×110mm)安装在合理位置,既不影响电梯平衡运行,也便于日后检修。 | 设备若安装在不当位置,可能改变轿厢重心,影响运行平稳性和安全性;也可能阻碍检修通道,增加未来维护难度和风险。 |
| 3. 安装调试时现场支持 | 这是安全责任 的体现。在安装和调试过程中,电梯人员负责将电梯置于检修或停止模式,防止电梯突然启动造成人身伤害。他们能操作电梯精确平层,以便安装楼层传感器等设备。 | 没有电梯人员在场,施工属于违规操作,人身安全风险极高。且无法精确控制电梯进行调试,效率低下且容易出错。 |
| 4. 随行线缆布线与指导 | 随行电缆随轿厢上下运动,其绑扎工艺有严格标准。电梯人员能指导如何正确绑扎,预留合适的余量("∞"形弯),确保线缆在长期往复运动中不被拉断或磨损。 | 不规范的布线可能在短期内导致信号中断,长期则可能磨损线缆绝缘层,造成短路,引发电梯故障,存在安全隐患。 |
| 5. 按键信号线接入(核心关键技术) | 这是最需要配合的环节。电梯人员能提供准确的按键线序图 。采用"无源干触点 "方式是行业标准,即梯控系统只是模拟按键动作,与电梯控制系统电气隔离,确保安全。对于触摸屏等新型电梯,电梯人员可能需提供专用转接板或协议接口。 | 接错线轻则导致按键失灵,重则可能烧毁电梯主板或梯控设备,造成重大经济损失和长时间停梯。 |
三、典型协同流程示例
mermaid
graph LR A[安装准备] --> B[电梯断电挂牌] B --> C[拆卸操作面板] C --> D[接入按键免破线接头] D --> E[控制柜安装梯控主板] E --> F[消防/对讲信号线接入] F --> G[机器人通信接口配置] G --> H[通电联调] H --> I[脱离功能测试] I --> J[交付验收]
注:全程需电梯人员操作关键步骤(紫色环节),施工方仅负责设备固定与布线辅助。
四、未配合可能导致的风险
-
安全事故:误接高电压线路烧毁梯控设备;错误截取安全回路导致急停。
-
功能失效:机器人无法召梯(协议不匹配)、人脸识别机供电不稳。
-
法律风险:私自改装导致电梯年检不合格,违反《特种设备安全法》。
综上,电梯公司的深度参与是确保系统安全运行、功能可靠及合规合法的必要条件,尤其在涉及电源、信号、通信三大核心系统的集成环节