http://www.autolabor.com.cn/book/ROSTutorials/
在Vscode中安装好下述插件。


1.新建文件夹(必须要有src)
mkdir -p ros_test/src
cd ros_test
catkin_make2.在文件夹ros_test下打开vscode
code .注意:这里一定要在src、devel、build同级目录下打开vscode.
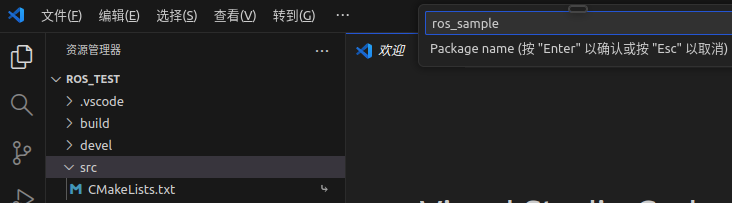
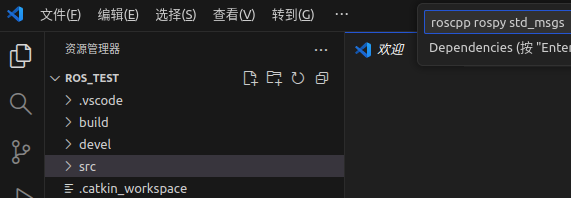
- 创建功能包
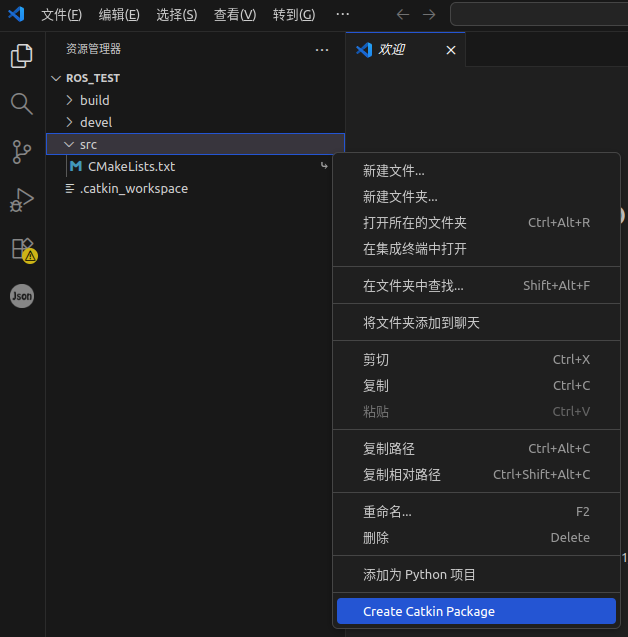
这里先创建自定义包的名字ros_sample,然后按entet,再次输入具体的功能包,这里是roscpp、rospy、std_msgs。
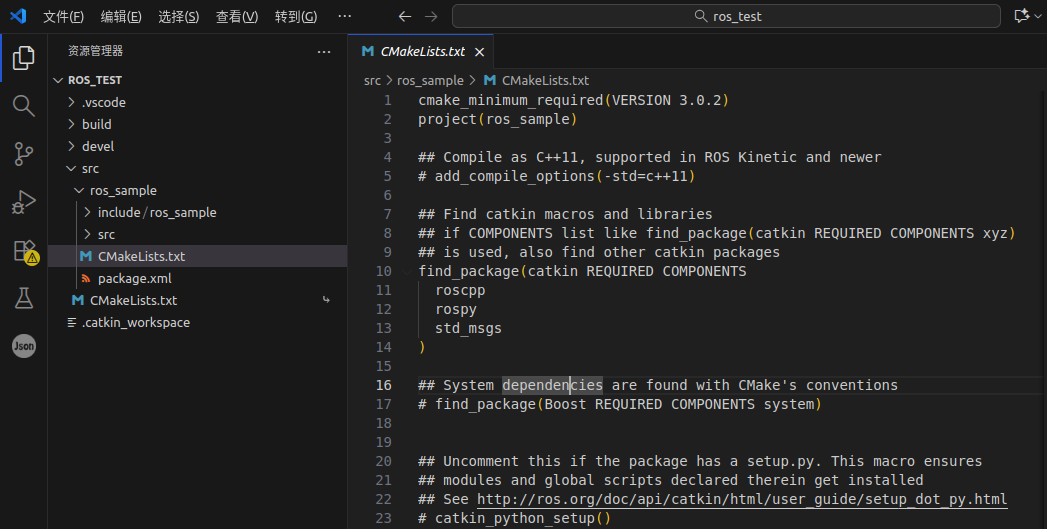
创建完成后会生成以下内容:
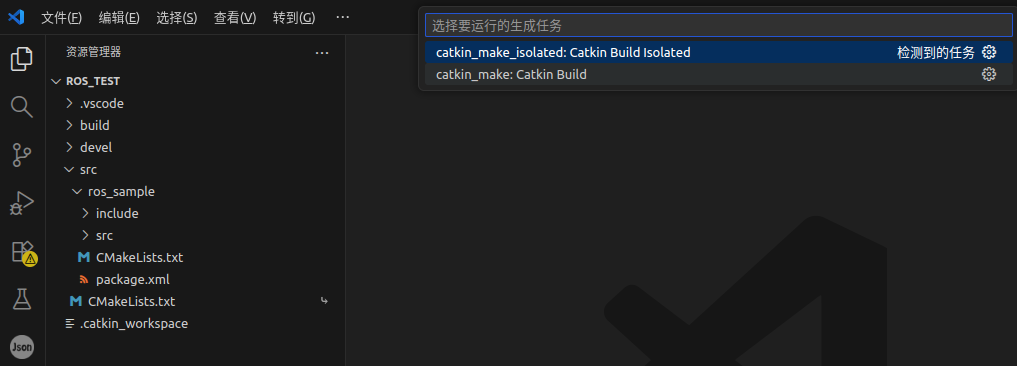
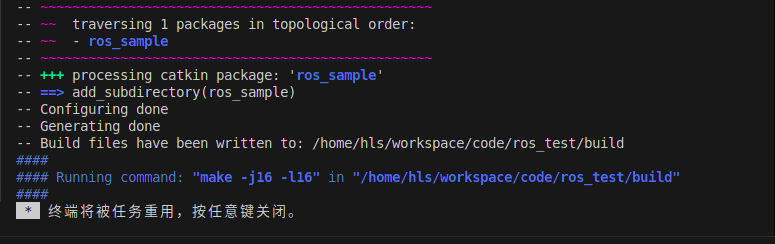
按ctrl+shift+b,选择catkin_make:Catkin Build,查看是否编译通过。
编译通过。
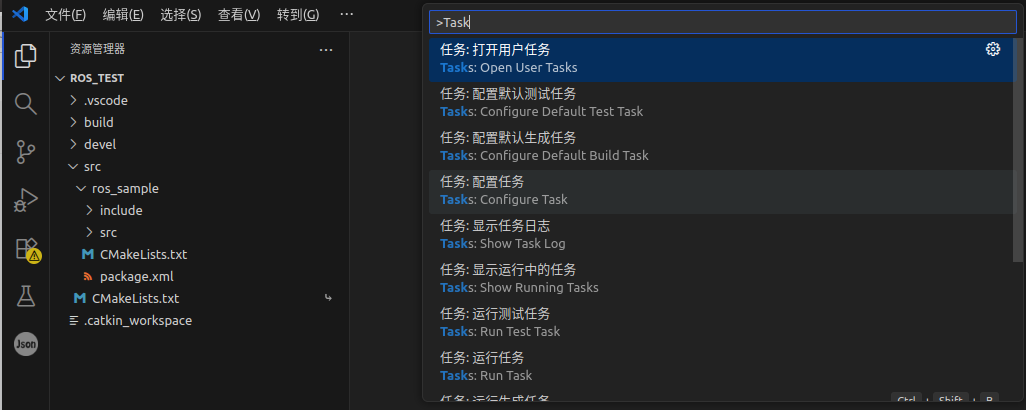
4.按命令ctrl + shift + p
ctrl + shfit + p输入Task,选择任务:配置任务选项;
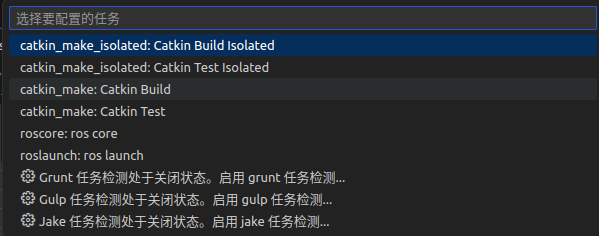
选择catkin_make: Catkin Build;
出现task.json文件:
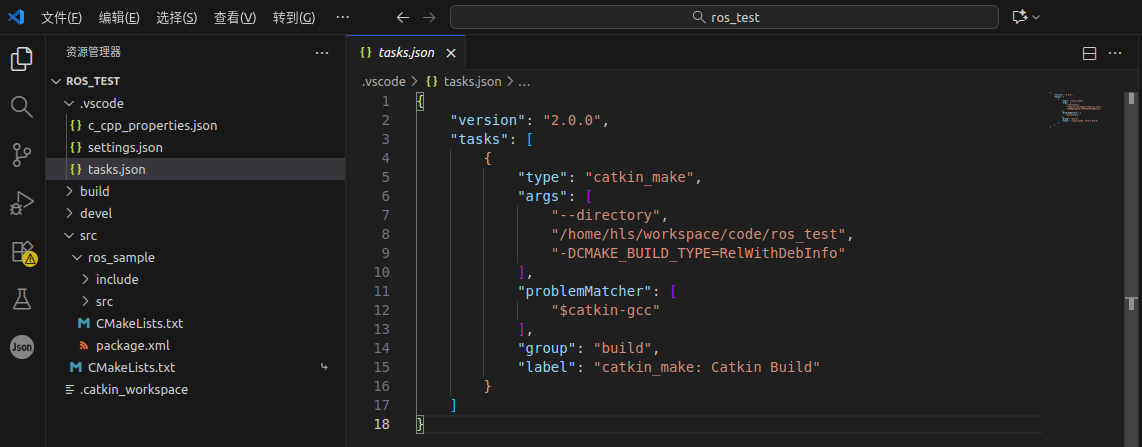
作以下修改:
{
"version": "2.0.0",
"tasks": [
{
"type": "shell",
"command":"catkin_make",
"args": [
"--directory",
"/home/hls/workspace/code/ros_test",
"-DCMAKE_BUILD_TYPE=RelWithDebInfo"
],
"problemMatcher": [
"$catkin-gcc"
],
"group": {"kind":"build","isDefault": true},
"presentation": {
"echo": true,
"reveal": "always",
"focus": false,
"panel": "shared",
"showReuseMessage": true,
"clear": false
},
"label": "catkin_make: debug"
}
]
}这里注意"args":\[\]中要加入当前工作空间的文件夹路径,该路径下包括文件:devel、build、src。
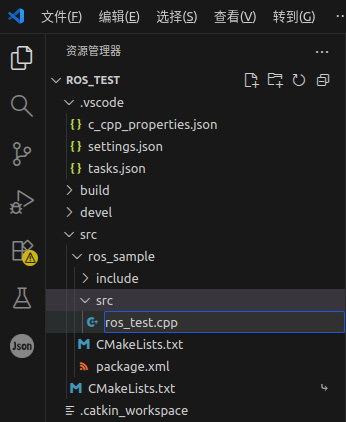
在ros_test/src/ros_sample/src下新建文件ros_test.cpp,并写入以下代码:
/*
控制台输出 HelloVSCode !!!
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//执行节点初始化
ros::init(argc,argv,"HelloVSCode");
//输出日志
ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
return 0;
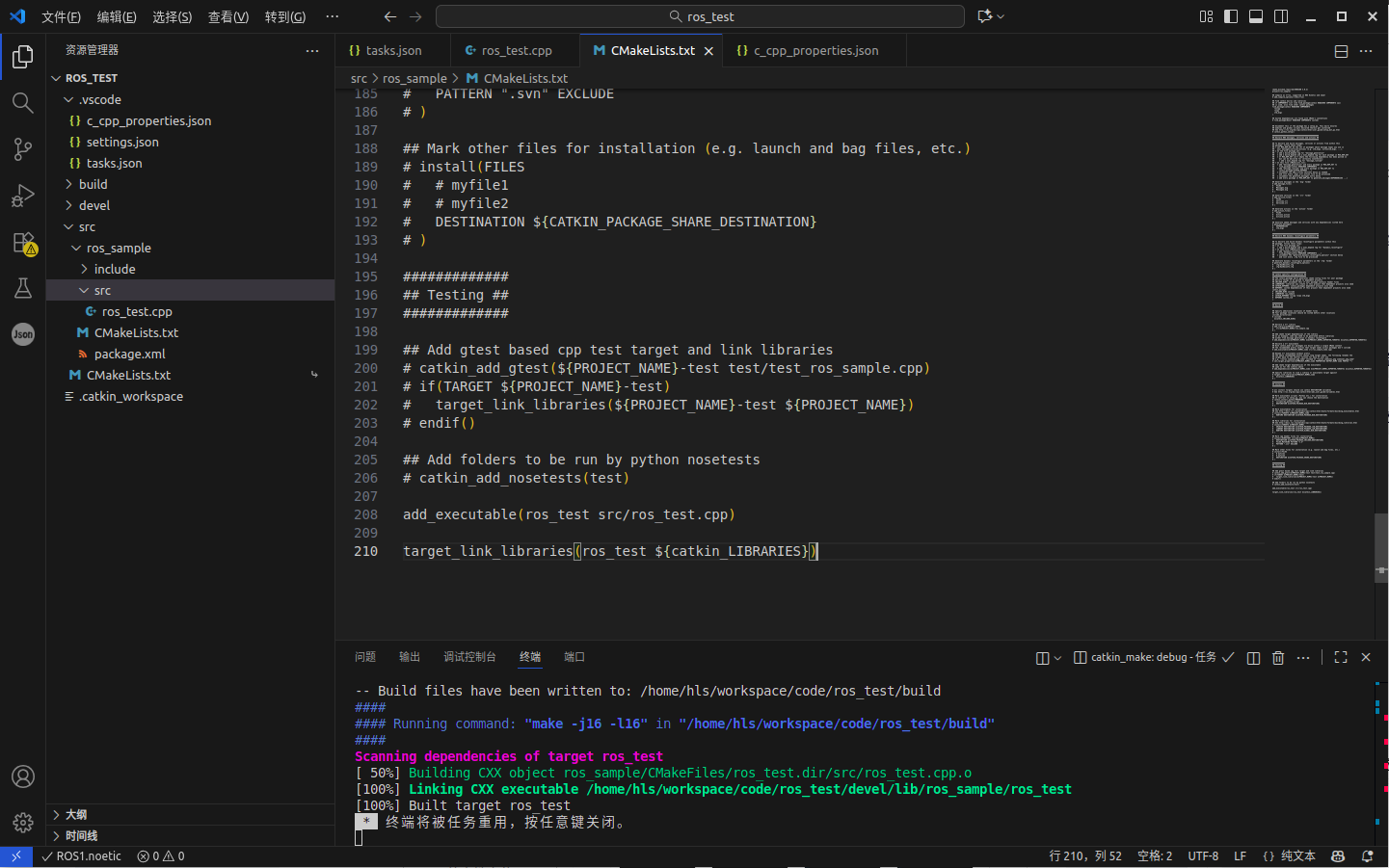
}CmakeLists.txt中加入一下2两行:
add_executable(节点名称
src/C++源文件名.cpp
)
target_link_libraries(节点名称
${catkin_LIBRARIES}
)在这里对应如下:
add_executable(ros_test src/ros_test.cpp)
target_link_libraries(ros_test ${catkin_LIBRARIES})ctrl+shift+B编译如下:
在终端输入:
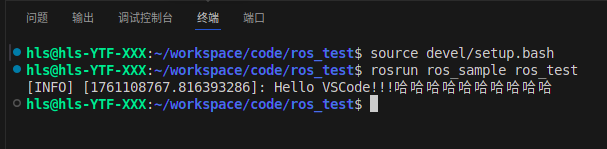
这里ros_sample是自定义包名,ros_test是对应的节点。