数值分析大作业-图像扭曲变形
一、需求分析
必做任务
必做任务要求用最近邻、双线性、双三次插值方法来实现旋转扭曲和畸变扭曲两种图像扭曲结果。
用户可以任意选择三种插值方式中的任意一种,也可以任意选择对图像进行哪种扭曲,且能很方便地设置扭曲参数。
选做任务
助教提供了 9 张图片,每张图片都有 68 个特征点,这些特征点的坐标保存在 txt 文件里。
任务要求对于任意两张图片,使用 TPS 薄板样条插值方法,求出一个从目标图像坐标点到原图像坐标点的映射,使得经过这个映射后原图像中的脸型变换为目标图像中的脸型。
用户可以任意选择 9 张图片中的两张图片作为原图片和目标图片,并使用三种插值方法中的任意一种来得到变换后的图像。
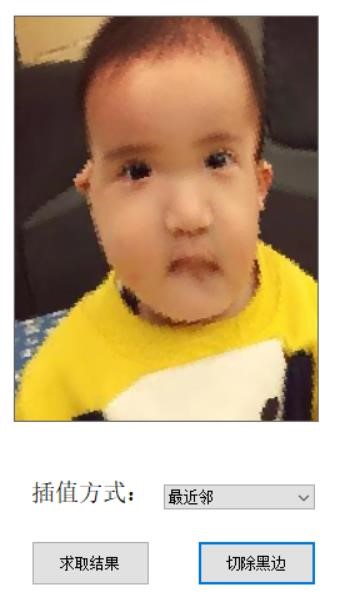
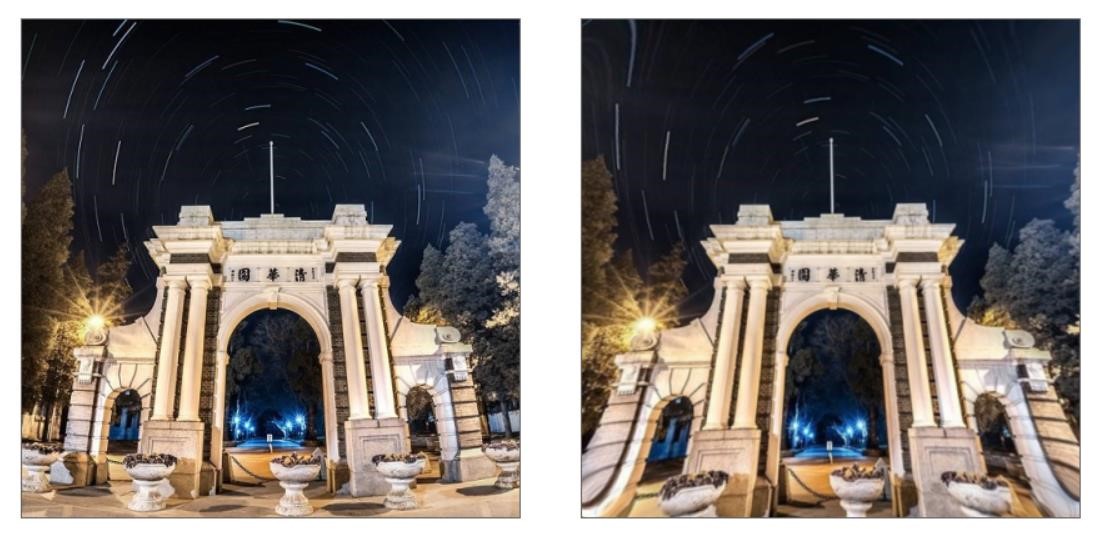
变换结果可能会出现较多黑边,有效结果面积过小。为了改善用户体验,我增加了切除黑边的功能,将变换结果旋转到正方向并拉伸到合适大小,再切除图片黑边,效果如下。
二、扭曲变形方式
必做任务要求用旋转扭曲和畸变扭曲两种方式对原图进行变形,本项目用目标图到原图的计算方式来实现。
设扭曲目标图为为𝐴𝐼𝑀𝑖 ′ 𝑗 ′,原图像为𝑆𝑖j,对于目标图中的每一点坐标(𝑖 ′, 𝑗 ′),通过扭曲函数f(𝑖 ′, 𝑗 ′)得到对应原图的坐标点(𝑖', 𝑗′),将𝐴𝐼𝑀(𝑖 ′, 𝑗 ′)的 RGB 值设为S(i,j)的 RGB 值。对遍历目标图中所有的点都遍历使用上述方法,便能得到目标图像。
然而,扭曲函数(i,j)=f(i′,j′)得到的原图坐标可能不是整数坐标,所以需要使用插值的方法求得S(i,j),本节介绍扭曲变形的方法。
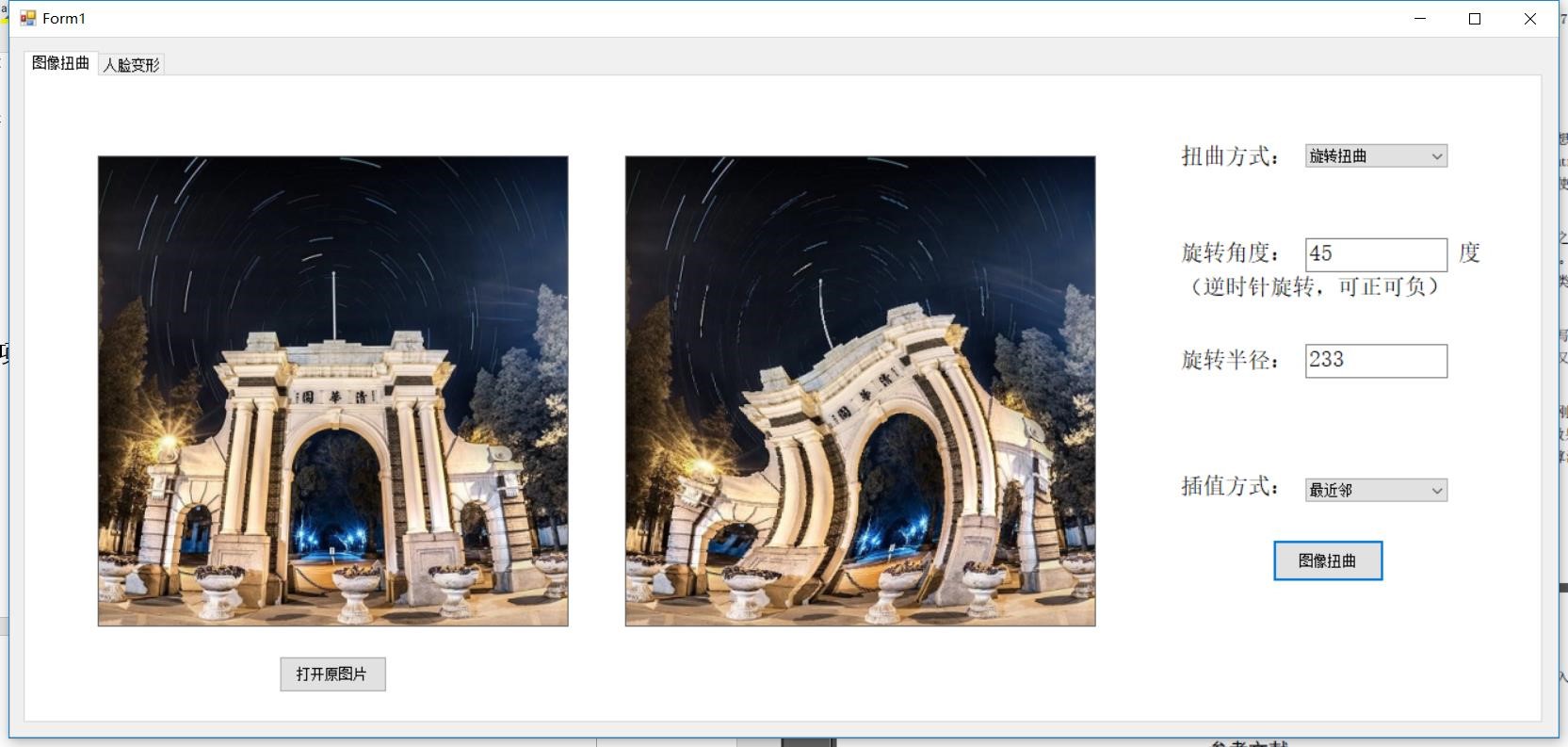
2.1 旋转扭曲

旋转扭曲将图片中心半径 R 以内的部分进行旋转变形,越靠近中心的部分变形程度越大,即旋转角度越大。用户可以选择旋转半径 R 和旋转最大角度
。
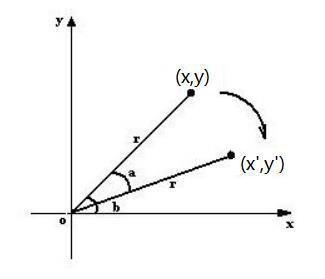
设扭曲目标图为𝐴𝐼𝑀𝑖 ′ 𝑗 ′,原图像为𝑆𝑖j,原图像高度为 h,宽度为 w。对于目标图中的一点坐标(i′,j′),先计算它到中心的距离

,则对于原图坐标(i,j)=(i′,j′),否则,计算旋转角度:
对应原图坐标(,):
再用插值的方法将原图中坐标(i,j)处的 RGB 值赋值给目标图(i′,j′)。
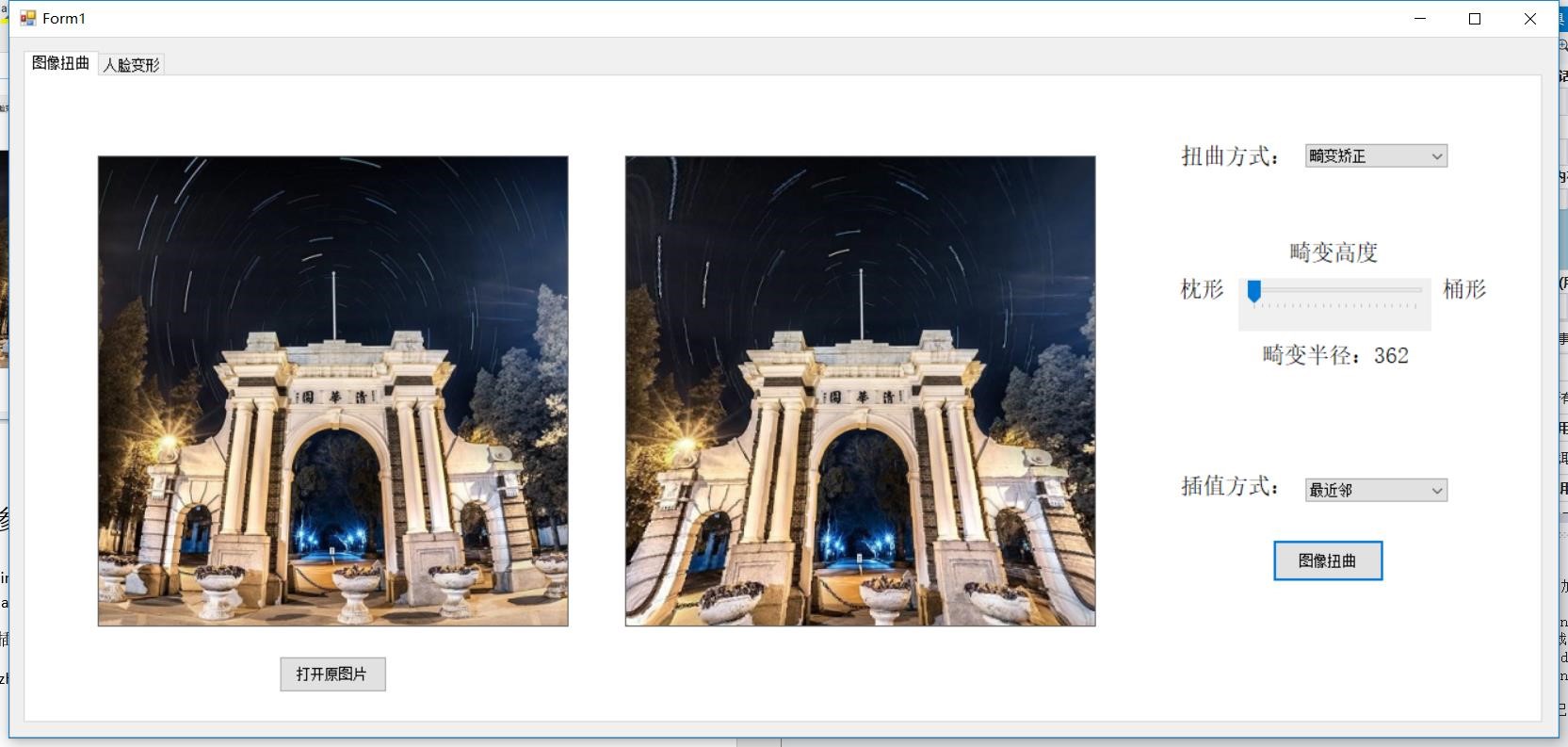
2.2 畸变扭曲
畸变扭曲是使图片拱起或凹陷,越靠近中间区域的部分变形程度越高,就像是将图片放在一个球的上表面或下表面再从球的正上方看下去。使图片拱起()
桶形畸变

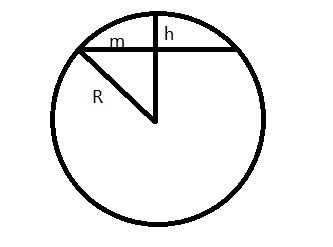
用户需要输入球形畸变的高度 H,设原图像高度为 h,宽度为 w,=
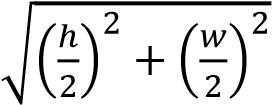
,则畸变球的半径
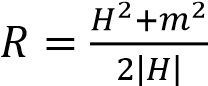
。
设扭曲目标图为𝐴𝐼𝑀𝑖 ′ 𝑗 ′,原图像为𝑆𝑖j。对于目标图中的一点坐标(i′,j′),先计算它到中心的距离。
设

为目标点坐标在球面上与中心点连线所形成弧线的长度 x 坐标,则
便是原图对应 x 坐标。
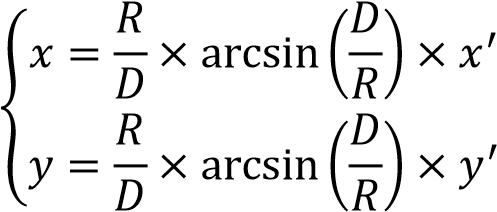
原图坐标

。再用插值的方法将原图中坐标(,)处的 RGB 值赋值给目标图(′,′)。
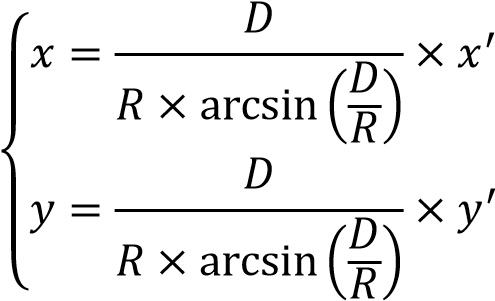
枕形畸变
枕形畸变的算法大体与桶形畸变相同,只是坐标计算部分,需要将原图坐标和目标图坐标位置颠倒,所以计算公式变为:
三、插值
设扭曲目标图为𝐴𝐼𝑀𝑖 ′ 𝑗 ′,原图像为𝑆𝑖j。用扭曲函数(i,j)=f(𝑖', 𝑗′)得到的原图坐标(i,j)可能不是整数坐标,所以需要使用插值的方法求得S(i,j),本节介绍插值的方法。
设原图位于坐标(i,j)处的 RGB 值为S(i,j),表示一个三元向量,满足向量的加减性质。
3.1 最近邻插值
最近邻插值的公式比较简单:

其中,round(x)函数表示最靠近浮点数 x 的整数值。

3.2 双线性插值
双线性插值,顾明思义,是分别在 x 方向和 y 方向进行两次插值,得到最终插值结果的方法。
(图片来自维基百科)
对于原图坐标(i,j),先得到离它最近的四个整数点坐标(i1,j1),(i1,j2),(i2,j1),(i2,j2)以及他们的 RGB 值。其中:
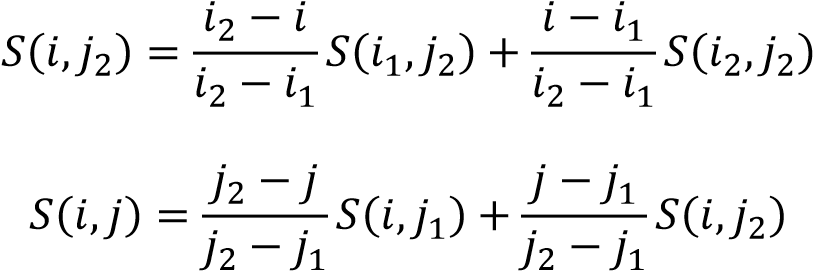
首先在 x 方向进行插值,


在用得到的两个点在 y 方向进行插值,即可得到结果


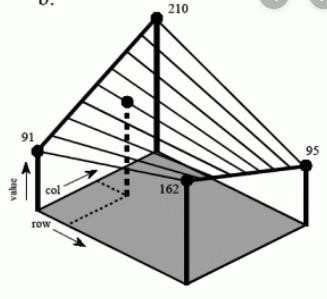
3.3 双三次插值
双三次插值原理与双线性插值类似,但涉及更多的点(16 个点),插值系数使用特定函数来计算,自变量是到所求点的横纵坐标距离。
设 𝑖1 = 𝑓𝑙𝑜𝑜𝑟(𝑖), 𝑗1 = 𝑓𝑙𝑜𝑜𝑟(𝑗); 𝑑𝑥 = 𝑖 − 𝑖1, 𝑑𝑦 = 𝑗 − 𝑗1
用到的点包括:
(𝑖1 + 𝑚,𝑗1 + 𝑛) 𝑚 = −1,0,1,2; 𝑛 = −1,0,1,2
插值函数:

其中,R(x)为 B 样条曲线函数
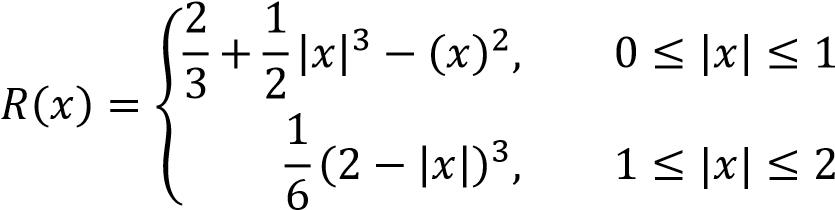
运算结果时还需要做正则化,除以运算过程中所乘系数的和。

四、人脸变形
任务要求从提供的 9 张图片中,任意选出两张作为原脸型图和目标脸型图,使用TPS 薄板样条插值方法,求出一个从目标脸型图坐标点到原脸型图坐标点的映射,并用这个映射求出结果图坐标对应原脸型图坐标的位置,结果图中原图像脸型变换为目标图像中的脸型。
用户可以任意选择 9 张图片中的两张图片作为原图片和目标图片,并使用三种插值方法中的任意一种来得到变换后的图像。
基本变换完成后,结果有一个问题,因为原图和目标图中脸的位置可能不在图片同一区域,甚至可能相差很大。这样变换得到的结果中,除脸部以外的部分会有较大的变形,为了避免这种的位置变形,本项目首先将目标脸型图的特征点平移到原脸型图特征点附近位置,再做上述步骤中的计算。
此外,变形结果中会有一定的黑边,本项目也增加了切除黑边的功能。

4.1 TPS 薄板样条插值
TPS 薄板样条插值是一种插值算法,在本项目中可以把矫正问题看作是一个二维插值问题,已知 n 个特征点对(n=64,目标脸型图中点的坐标)(xi, yj)和它们对应的函数值(原图脸型对应点的坐标)𝑓(𝑥𝑖 , 𝑦𝑖 ) ∈ 𝐷^2 , (𝑖 = 1,2, ... , 𝑛),求一个插值函数,并用这个插值函数求得目标图中所有点对应的原图中点的坐标,求出的原图中点坐标可能不是整数,所以还需要用插值方法求得这个点的 RGB 值。
关键是如何求得这个插值函数,在 TPS 算法中(Bookstein & intelligence, 1989),插值函数形式为:

其中,U(𝑡) = t 2 log 𝑡。𝑎0, 𝑎1, 𝑎2, 𝑤i均为参数,维度均为 2×1,满足
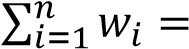

将上面的条件和插值条件写成矩阵形式:
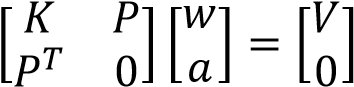
其中,𝐾 ∈ 𝐷 𝑛×𝑛 , 𝐾𝑖𝑗 = 𝑈(|(𝑥𝑖 , 𝑦𝑖 ) − (𝑥𝑗 , 𝑦𝑗)|; 𝑃 ∈ 𝐷 3×𝑛 , 𝑃𝑖 = 1 𝑥𝑖 𝑦𝑖 ;
𝑤 ∈

设

。
4.2 求取参数矩阵 W
求取参数

的过程其实也是一个解 n+3 元线性方程组的过程。
4.3 使用 W 求取结果图
求得参数矩阵 W 后,就可以使用 TPS 公式求取结果图中每个坐标点(,)对应原脸型图中的坐标

f(x,y)可能不是整数值,所以需要使用前面介绍的三种插值方法之一来求得原图在f(x,y)坐标点处的 RGB 值,并将它赋给结果图(x,y)处。
4.4 切除黑边
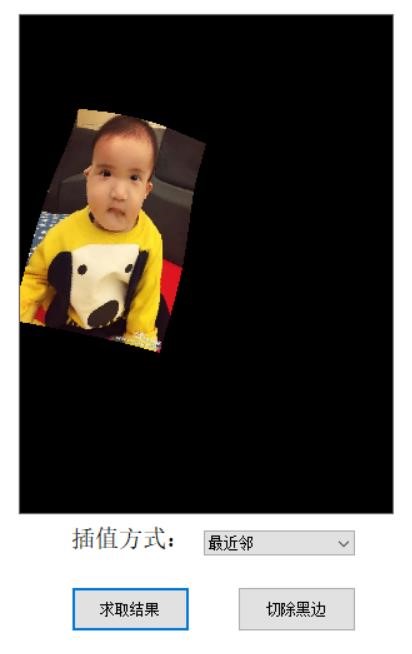
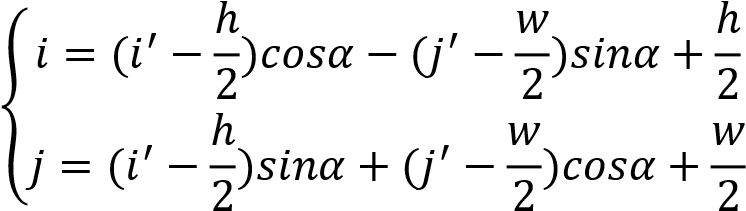
由于目标图和原图中脸型方向可能不同,所以变换结果相较原图,可能会有较大角度的旋转,如图所示。如果直接在这样的结果上进行水平纵向的裁剪,那么图像有效部分将有较大程度的损失,所以需要先将结果图片旋转到正方向。

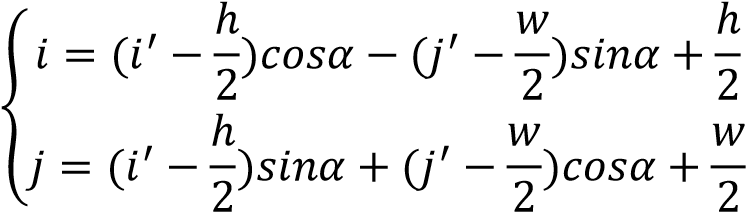
为了将结果图片旋转到正方向,需要找到图片的左上角和左下角,这两个点可以在 TPS 变换过程中进行记录,结果如上图中红色十字标注。利用这两个点就能算出图片当前的倾斜角α,再用旋转公式得到目标图中每一个点(i′,j′)对应原图的坐标点(i,j)
将旋转后的坐标进行伸缩和平移,就能让图片占据框架的主要部分了,如图所示。

最后,遍历检测出图像没有黑边的最小范围,并对图像进行裁剪就可以了。


五、误差分析
5.1 舍入误差
计算过程中使用 double 型变量,其精度约为 10^-16,因此单次计算舍入误差 R1 ≤5×10^-17,总的舍入误差会随计算次数累积,计算过程中循环次数最多在 n^2 量级(100^2量级),所以舍入误差大概在 10^-13 量级。
在进行插值运算时,运算结果的 RGB 值需要离散化为 0~255 的整数,舍入误差R2 ≤0.5
5.2 方法误差
本项目用到的模块化算法有:三种插值方法、两种扭曲方法、TPS 薄板样条插值等,其中图像扭曲方法和 TPS 算法在生成结果图像时都用到了三种插值方法,也就是说最后的方法误差都落在三种插值方法上。
最近邻插值插值
公式:
误差:
其中,

大小与具体图像有关,但可以保证
。
双线性插值插值
公式:

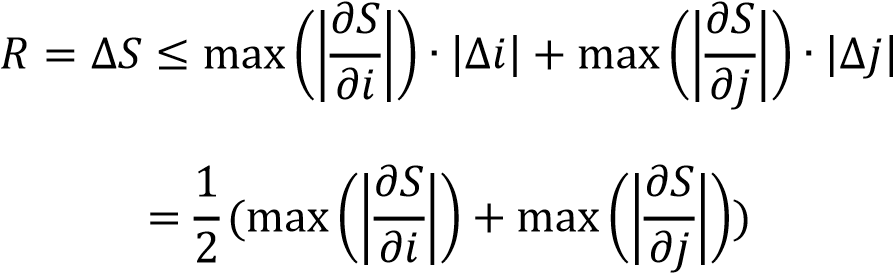
双线性插值是在 i 方向和 j 方向分别进行一维一阶(n=1)插值,先计算一维误差:
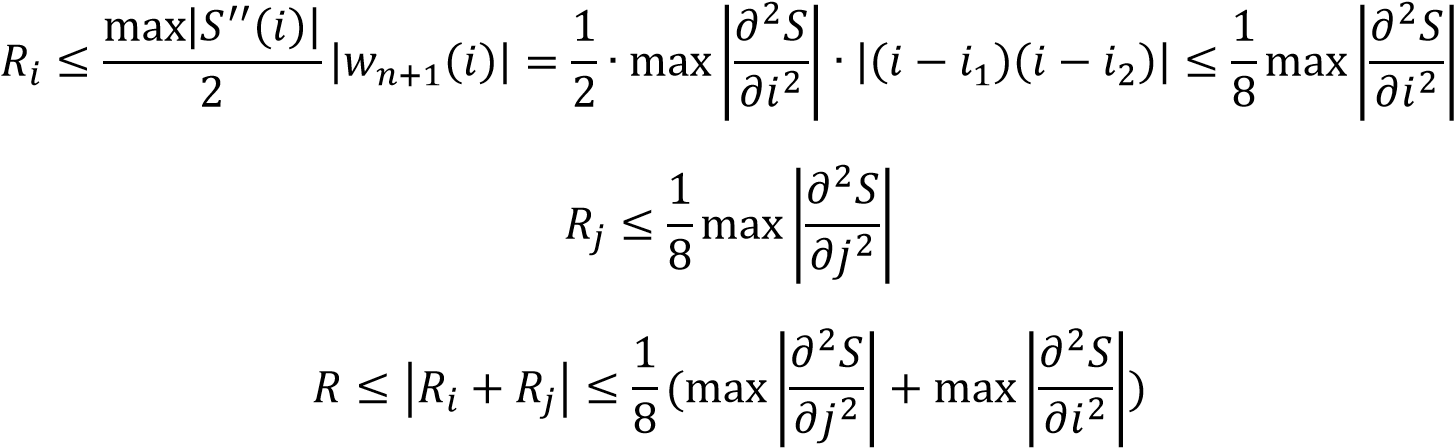
双三次插值
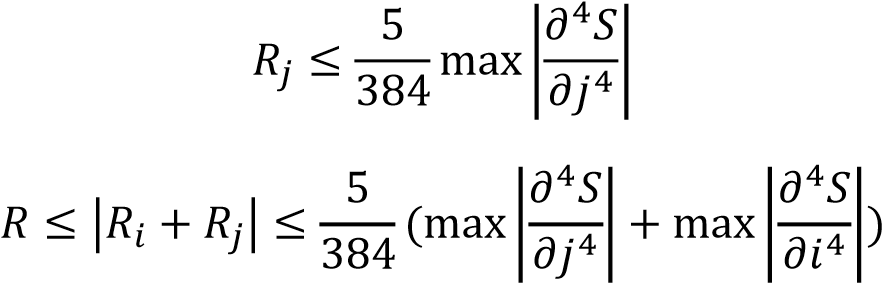
双三次插值可以视为在 i 方向和 j 方向分别进行一维三阶(n=3)插值,先计算一维误差:

六、项目结果
程序界面如图所示,用两个标签页分别展示必做任务和选做任务的界面。必做任务的标签页可以选择扭曲方式、插值方式、输入扭曲参数,扭曲参数的输入部件会根据扭曲方式的选择而切换。
选做任务的界面中,可以任意选择原脸型图片和目标脸型图片,可以选择三种插值方式中的一种。

求取结果后可以按"切除黑边"按钮切除图片黑边。

具体变换的结果已在前面贴出,不再重复。
七、总结
通过完成这次大作业,我提高了运用理论知识解决实际问题的能力,比如插值的方法;同时也学到了很多新知识,比如 TPS 薄板样条插值,使用稳定的高斯消元法求解多元线性方程等。
在进行算法的实现时,对算法的深入理解和清晰的思路是非常重要的。以 TPS 算法为例,首先求解参数矩阵 W,求解过程是以目标脸型图片中的特征点映射到原脸型图片中的特征点,与之对应的,求解结果图片也是将结果图片中的每个坐标点带入 TPS 函数求解原图片中对应的位置。
此外,这次大作业也让我意识到代码模块化和标准化的重要性,从一开始我就将代码实现分成了几个类的实现,减少代码复用,所以调试起来很方便,增加新功能也很便捷。
总之,通过这次大作业我增长了很多新知识,加深了对理论知识的理解,也加强了我动手解决实际问题的能力。