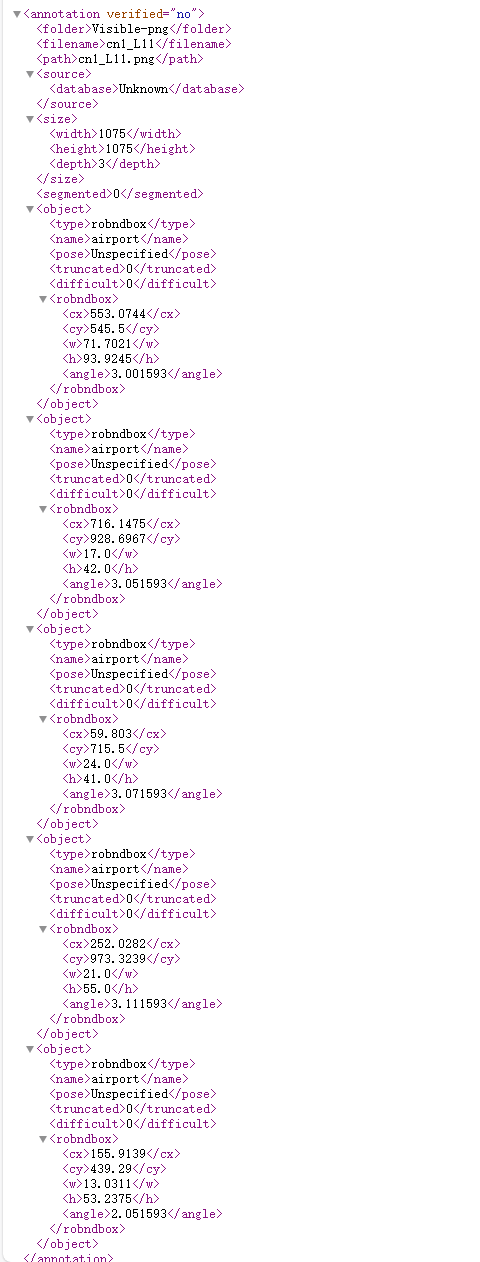
VOC XML 旋转框 转换为 YOLO OBB 格式:
输入:VOC XML (cx, cy, w, h, angle)
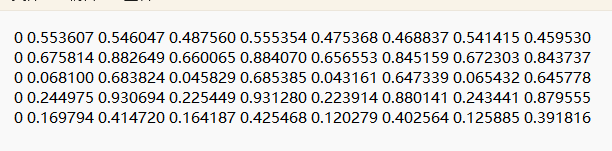
输出:YOLO OBB (class_id x1 y1 x2 y2 x3 y3 x4 y4) - 归一化坐标
示例如下:
输入:VOC XML (cx, cy, w, h, angle)
输出:YOLO OBB (class_id x1 y1 x2 y2 x3 y3 x4 y4) - 归一化坐标
代码如下:
bash
"""
VOC XML 旋转框 转换为 YOLO OBB 格式
输入:VOC XML (cx, cy, w, h, angle)
输出:YOLO OBB (class_id x1 y1 x2 y2 x3 y3 x4 y4) - 归一化坐标
"""
import os
import xml.etree.ElementTree as ET
import numpy as np
from pathlib import Path
def rotated_box_to_poly(cx, cy, w, h, angle):
"""
将旋转框(中心点+宽高+角度)转换为4个顶点坐标
参数:
cx, cy: 中心点坐标
w, h: 宽度和高度
angle: 旋转角度(弧度)
返回:
4个顶点坐标 [(x1,y1), (x2,y2), (x3,y3), (x4,y4)]
"""
# 计算半宽和半高
w_half = w / 2
h_half = h / 2
# 4个角点相对于中心的偏移(未旋转时)
# 按顺时针顺序:左上、右上、右下、左下
corners = np.array([
[-w_half, -h_half], # 左上
[w_half, -h_half], # 右上
[w_half, h_half], # 右下
[-w_half, h_half] # 左下
])
# 旋转矩阵
cos_a = np.cos(angle)
sin_a = np.sin(angle)
rotation_matrix = np.array([
[cos_a, -sin_a],
[sin_a, cos_a]
])
# 应用旋转
rotated_corners = corners @ rotation_matrix.T
# 加上中心点坐标
rotated_corners[:, 0] += cx
rotated_corners[:, 1] += cy
return rotated_corners
def parse_xml(xml_path):
"""
解析 VOC XML 文件
返回:
image_width, image_height, objects_list
"""
tree = ET.parse(xml_path)
root = tree.getroot()
# 获取图像尺寸
size = root.find('size')
img_width = int(size.find('width').text)
img_height = int(size.find('height').text)
# 解析所有目标
objects = []
for obj in root.findall('object'):
# 获取类别名称
class_name = obj.find('name').text
# 获取旋转框参数
robndbox = obj.find('robndbox')
if robndbox is not None:
cx = float(robndbox.find('cx').text)
cy = float(robndbox.find('cy').text)
w = float(robndbox.find('w').text)
h = float(robndbox.find('h').text)
angle = float(robndbox.find('angle').text)
objects.append({
'class_name': class_name,
'cx': cx,
'cy': cy,
'w': w,
'h': h,
'angle': angle
})
return img_width, img_height, objects
def convert_xml_to_yolo_obb(xml_path, output_path, class_mapping):
"""
转换单个 XML 文件为 YOLO OBB 格式
参数:
xml_path: XML 文件路径
output_path: 输出 txt 文件路径
class_mapping: 类别名称到ID的映射字典
"""
try:
# 解析 XML
img_width, img_height, objects = parse_xml(xml_path)
# 转换每个目标
yolo_lines = []
for obj in objects:
# 获取类别ID
class_name = obj['class_name']
if class_name not in class_mapping:
print(f"警告: 未知类别 '{class_name}' 在文件 {xml_path}")
continue
class_id = class_mapping[class_name]
# 转换为4个顶点
corners = rotated_box_to_poly(
obj['cx'], obj['cy'],
obj['w'], obj['h'],
obj['angle']
)
# 归一化坐标(除以图像宽高)
corners[:, 0] /= img_width
corners[:, 1] /= img_height
# 确保坐标在 [0, 1] 范围内
corners = np.clip(corners, 0, 1)
# 格式化为 YOLO OBB 格式
# class_id x1 y1 x2 y2 x3 y3 x4 y4
line = f"{class_id}"
for corner in corners:
line += f" {corner[0]:.6f} {corner[1]:.6f}"
yolo_lines.append(line)
# 写入输出文件
with open(output_path, 'w') as f:
f.write('\n'.join(yolo_lines))
return True, len(yolo_lines)
except Exception as e:
print(f"错误: 处理文件 {xml_path} 时出错: {str(e)}")
return False, 0
def batch_convert(xml_dir, output_dir, class_mapping):
"""
批量转换 XML 文件
参数:
xml_dir: XML 文件目录
output_dir: 输出目录
class_mapping: 类别映射字典
"""
# 创建输出目录
os.makedirs(output_dir, exist_ok=True)
# 获取所有 XML 文件
xml_files = list(Path(xml_dir).glob('*.xml'))
print(f"找到 {len(xml_files)} 个 XML 文件")
print(f"开始转换...")
print("-" * 60)
success_count = 0
total_objects = 0
for i, xml_path in enumerate(xml_files, 1):
# 生成输出文件名(保持相同的文件名,但扩展名改为 .txt)
output_filename = xml_path.stem + '.txt'
output_path = os.path.join(output_dir, output_filename)
# 转换
success, obj_count = convert_xml_to_yolo_obb(
str(xml_path),
output_path,
class_mapping
)
if success:
success_count += 1
total_objects += obj_count
# 每100个文件显示一次进度
if i % 100 == 0:
print(f"进度: {i}/{len(xml_files)} ({i*100//len(xml_files)}%)")
print("-" * 60)
print(f"转换完成!")
print(f"成功: {success_count}/{len(xml_files)} 个文件")
print(f"总目标数: {total_objects}")
print(f"输出目录: {output_dir}")
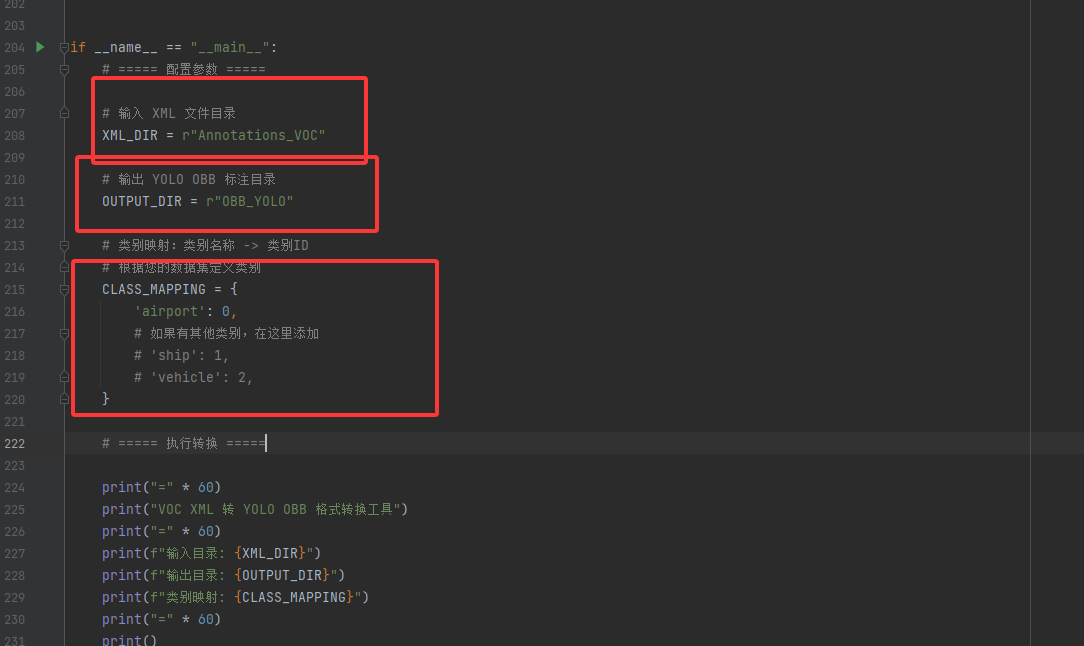
if __name__ == "__main__":
# ===== 配置参数 =====
# 输入 XML 文件目录
XML_DIR = r"Annotations_VOC"
# 输出 YOLO OBB 标注目录
OUTPUT_DIR = r"OBB_YOLO"
# 类别映射:类别名称 -> 类别ID
# 根据您的数据集定义类别
CLASS_MAPPING = {
'airport': 0,
# 如果有其他类别,在这里添加
# 'ship': 1,
# 'vehicle': 2,
}
# ===== 执行转换 =====
print("=" * 60)
print("VOC XML 转 YOLO OBB 格式转换工具")
print("=" * 60)
print(f"输入目录: {XML_DIR}")
print(f"输出目录: {OUTPUT_DIR}")
print(f"类别映射: {CLASS_MAPPING}")
print("=" * 60)
print()
# 检查输入目录是否存在
if not os.path.exists(XML_DIR):
print(f"错误: 输入目录不存在: {XML_DIR}")
exit(1)
# 执行批量转换
batch_convert(XML_DIR, OUTPUT_DIR, CLASS_MAPPING)
print()
print("=" * 60)
print("转换完成!")
print()需要修改的地方如下:
当然可以 👍 我来帮你系统地讲清楚"旋转目标检测(Rotated Object Detection)"这个研究方向,包括它的背景、核心问题、主流方法和应用场景------这部分内容非常适合写进论文或开题报告。
旋转目标检测的一些资料:
一、研究背景
在传统的目标检测(Object Detection)任务中,主流算法(如 YOLO、Faster R-CNN、DETR 等)通常假设目标是水平矩形(Horizontal Bounding Box, HBB) ,即目标的边界框与图像坐标轴平行。然而,在遥感图像、SAR 图像、工业检测、文本检测、港口船舶检测、电力巡检、航空影像 等任务中,目标往往存在任意角度的旋转 。
例如:
- 遥感图像中的飞机、船舶倾斜角各异;
- SAR 图像中的车辆和建筑由于成像机制而存在旋转;
- 工业场景中零部件或烟雾目标方向不固定。
这就导致水平检测框出现大量背景冗余 和目标重叠 ,难以准确描述目标的方向与位置。
因此,**旋转目标检测(Rotated Object Detection, ROD)**应运而生。
二、核心问题
旋转目标检测的关键是:
如何精确表示 目标的旋转姿态并在回归与匹配阶段稳定学习。
1. 旋转框表示方式
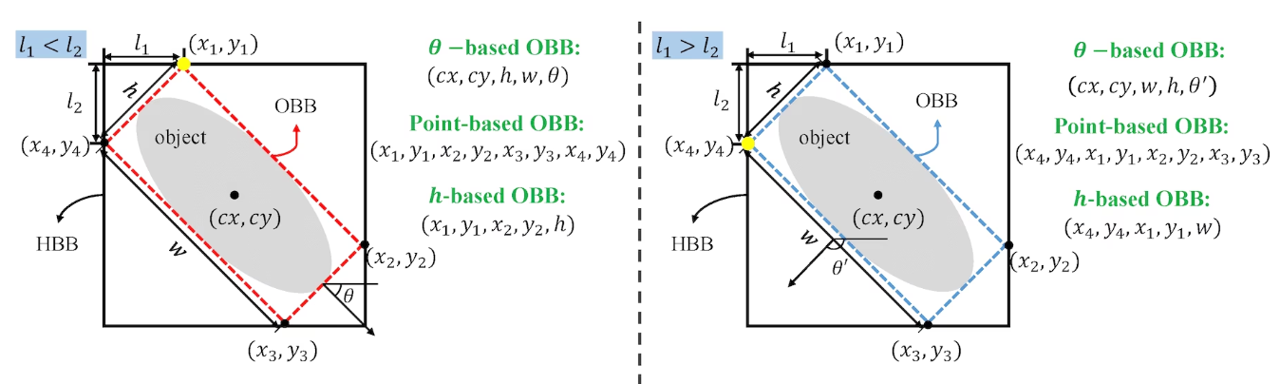
目前常见的旋转框(Rotated Bounding Box, RBox)表示方式有:
- 五参数表示法 (x, y, w, h, θ) :
其中(x, y)为框中心坐标,w、h为宽高,θ为旋转角(通常取 -90°~90° 或 0°~180°)。 - 四顶点坐标法 (x1, y1, x2, y2, x3, y3, x4, y4) :
精确但计算复杂,难以直接回归。 - 基于向量或方向编码的方法(如极坐标表示)用于缓解角度不连续问题。
2. 角度不连续性问题(Angle Periodicity Problem)
由于角度具有周期性(例如 θ=179° 与 θ=-181° 等价),直接回归角度会导致梯度不连续。
主流解决思路:
- 使用 sin-cos 编码(将角度映射为连续空间)。
- 将角度离散化为分类问题(如 Oriented R-CNN)。
- 利用平滑损失函数或对称框设计。
三、主流算法发展脉络
旋转目标检测的发展大致分为三类方法:
(1)基于水平框扩展的旋转检测
代表:R²CNN、RRPN、RRoI Transformer
思路:在原有水平检测框基础上,增加角度预测或旋转 RoI 操作。
优点:对现有检测框架改动较小。
缺点:旋转框回归复杂、角度不稳定。
(2)基于锚框(Anchor-based)的方法
代表:Rotated RetinaNet、Gliding Vertex、CSL (Circular Smooth Label)
思路:为每个锚框增加角度参数,或采用平滑的角度回归机制。
优点:检测精度较高。
缺点:锚框设计复杂,计算量大。
(3)基于中心点或无锚框(Anchor-free)的方法
代表:PolarDet、FCOSR、YOLO-R、Rotated-DETR
思路:直接预测中心点与旋转参数,避免大量锚框匹配。
优点:结构简洁、速度快、易于迁移。
缺点:小目标与密集目标容易重叠。
四、损失函数与匹配策略
旋转检测中常见的损失函数包括:
- Smooth L1 或 IoU-based Loss(如 Rotated IoU, SkewIoU, KFIoU, GIoU、SIoU 等);
- Angle Loss(用于稳定角度回归,如 CSL、Gaussian Circular Label);
- Rotated IoU/DIoU/GIoU Loss 计算更加复杂,需考虑四边形交并比。
匹配阶段通常采用 Rotated IoU 计算真实框与预测框的重叠度,以选择正负样本。
五、应用场景
旋转目标检测在多个高价值领域有显著应用:
| 场景 | 示例 | 特点 |
|---|---|---|
| 遥感图像 | 飞机、船舶、建筑检测 | 多角度目标密集分布 |
| SAR图像 | 车辆、舰船识别 | 背景复杂、噪声多 |
| 工业检测 | 零部件、缺陷方向检测 | 形状不规则 |
| 文本检测 | 自然场景文本检测 | 倾斜文本常见 |
| 电梯监控 | 电瓶车、人物检测 | 角度多变,空间狭窄 |
六、当前挑战与研究方向
- 角度不连续与边界模糊问题
- 旋转框与水平框的匹配困难
- 复杂场景下的小目标检测与重叠抑制
- 如何与 Transformer、动态卷积、大核网络结合
- 轻量化与边缘设备部署(如你提到的基于 LubanCat-4 平台的应用)
七、总结
旋转目标检测通过引入旋转框回归与角度预测机制,解决了目标任意方向分布的定位难题。未来研究趋势是:
- Anchor-free + Transformer + IoU-based loss 的融合;
- 轻量化结构设计(适配边缘计算平台);
- 自适应角度建模 与 语义方向感知特征提取。