核心硬件:
工控机
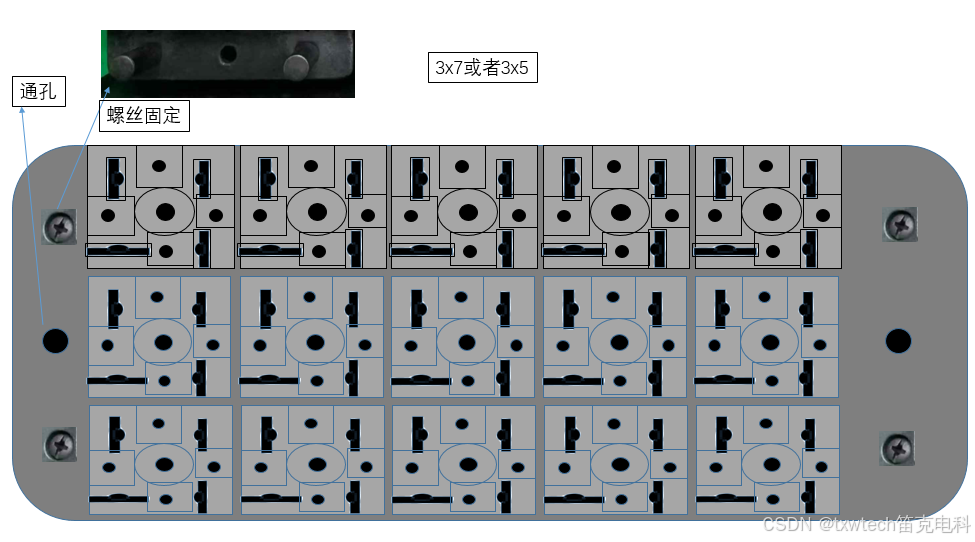
防止石墨盘平台
四轴机器人
直线模组
相机,POE交换机,光源以及控制器
机械臂的夹爪
振动盘,振动盘的传送轨道
实现流程:
通过视觉引导,对石墨盘进行定位,计算引脚孔的坐标,通过像素坐标转机器坐标实现自动插引脚功能
要把引脚孔插满,夹爪设计时需要同时抓4个引脚,夹爪引脚间距与石墨盘孔径一直
振动盘的传送轨道4个轨道,到达取料口后通过上顶气缸顶起引脚,方便夹爪抓取
通过观察引脚孔,优先抓取4颗引脚,后面需要抓3颗情况
视觉标定:
确保插孔精度,则需要标定
视觉引导具体流程:
待续。。。