E
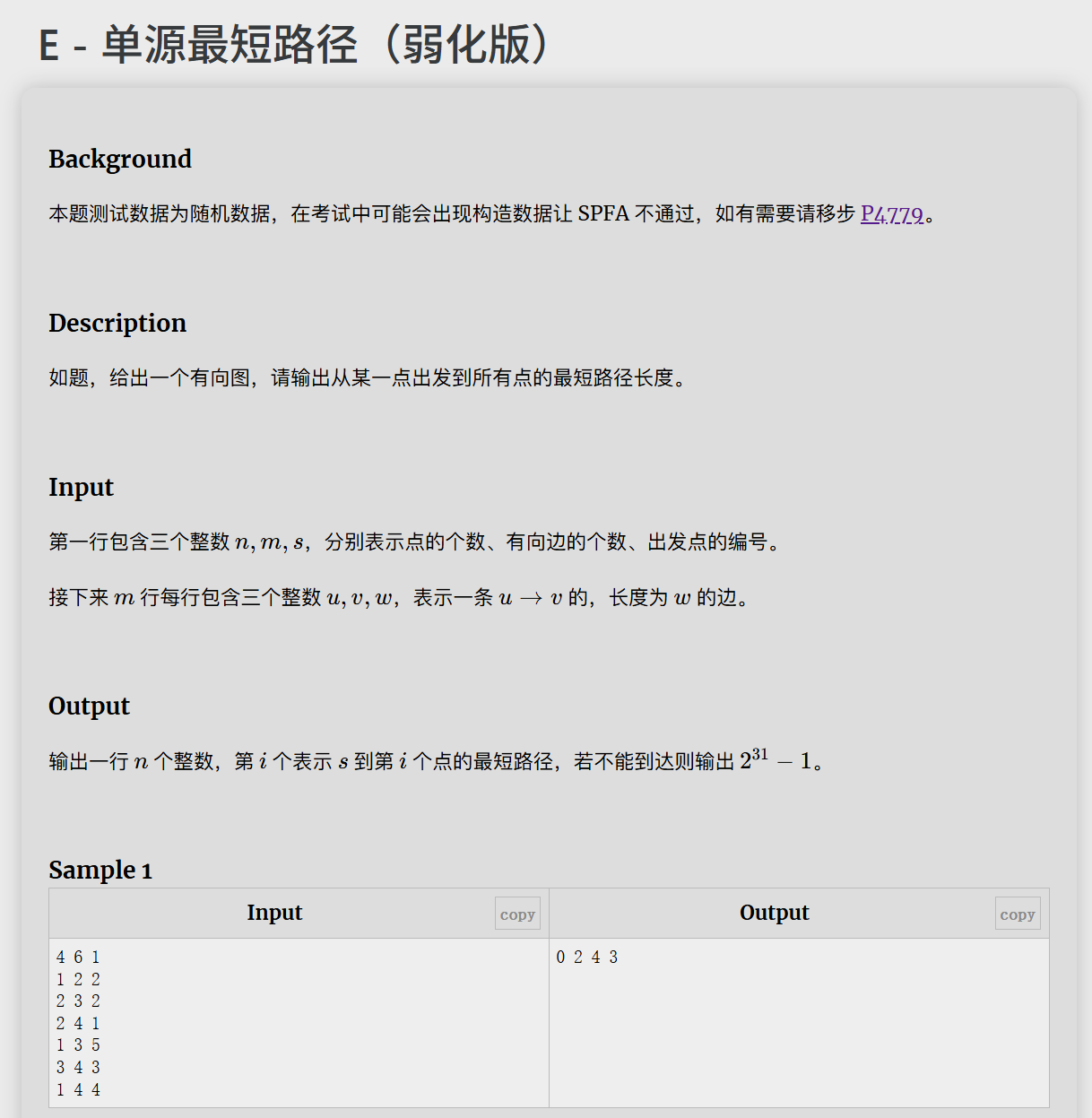
单源最短路径,让我捡回迪杰斯特拉。。。
上一把写迪杰斯特拉还是实验课:数据结构实验------基于 Dijsktra 算法的最短路径求解_编程题实训-实验5-基于dijsktra-CSDN博客。
我就不再提上面的s山了,现在我的写法优化了很多。这个算法的核心就两步:
1.比较dilst.res+w和dinxt.res,如果更小代表解更优,就更新。
更新不仅是dinxt.res,而且dinxt.pre也需要更新成lst。
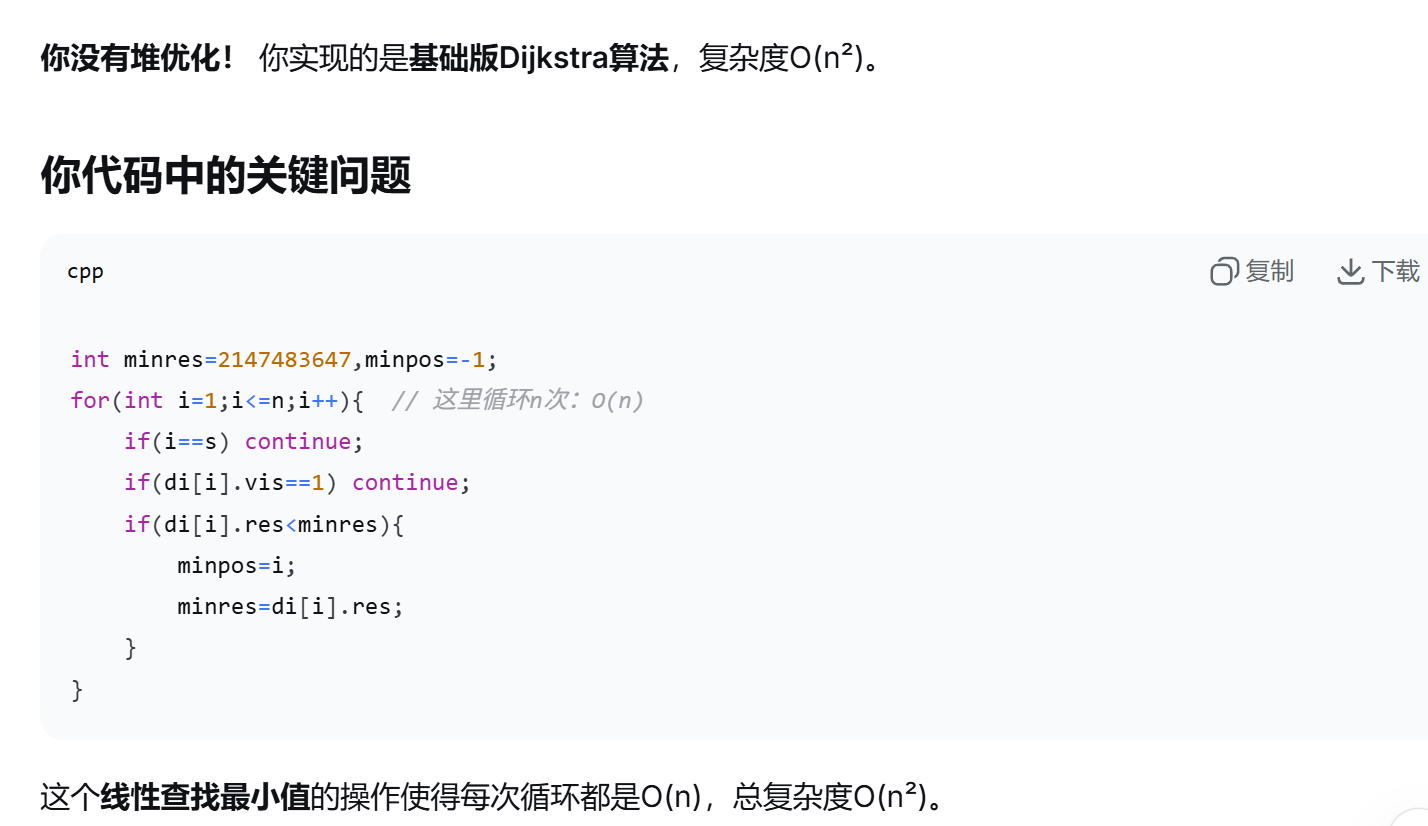
2.比较dii.res,寻找最小值,作为下一个点。
然后就是其它的建结构体、初始化等内容。
最后注意,可能有非连通的情况,比如这个点:
输入:
5 15 5
2 2 270
1 4 89
2 1 3
5 5 261
5 2 163
5 5 275
4 5 108
4 4 231
3 4 213
3 3 119
3 1 77
3 1 6
2 4 83
5 5 196
5 5 94
输出
166 163 2147483647 246 0
所以,while终止的条件不应该是集齐所有点cnt==n,而是lst==-1,也就是下一个点不存在。
Code
cpp
#include<iostream>
#include<cstring>
#include<vector>
using namespace std;
struct node{
bool vis;
int res,pre;
}di[100005];
int n,m,s,u,v,w;
vector<vector<pair<int,int> > > a(100005);
void init();
void dijkstra();
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
cin>>n>>m>>s;
init();
for(int i=1;i<=m;i++){
cin>>u>>v>>w;
a[u].push_back({v,w});
}
dijkstra();
for(int i=1;i<=n;i++){
cout<<di[i].res<<' ';
}
cout<<endl;
return 0;
}
void init(){
for(int i=1;i<=n;i++){
di[i].vis=0;
di[i].res=2147483647;
di[i].pre=i;
}
}
void dijkstra(){
int cnt=0;//如果cnt=n那么遍历完,终止
di[s].res=0;//起始位置res等于0
int lst=s;//lst表示上一个的位置
//while(cnt<n)写法是错的
while(lst!=-1){//可能不是连通图
//标记lst已经被遍历过了
di[lst].vis=1;
//lst上一个 nxt下一个 wei权值
for(int i=0;i<a[lst].size();i++){
int nxt=a[lst][i].first;
int wei=a[lst][i].second;
if(di[lst].res+wei<di[nxt].res){
di[nxt].res=di[lst].res+wei;
di[nxt].pre=lst;
}
}
int minres=2147483647,minpos=-1;
for(int i=1;i<=n;i++){
if(i==s) continue;
if(di[i].vis==1) continue;
//没有被遍历而且距离最短
if(di[i].res<minres){
minpos=i;
minres=di[i].res;
}
}
lst=minpos;//下一个遍历的位置就是minpos的位置
//cout<<lst<<endl;//用来测试下一个点位
cnt++;
}
}F
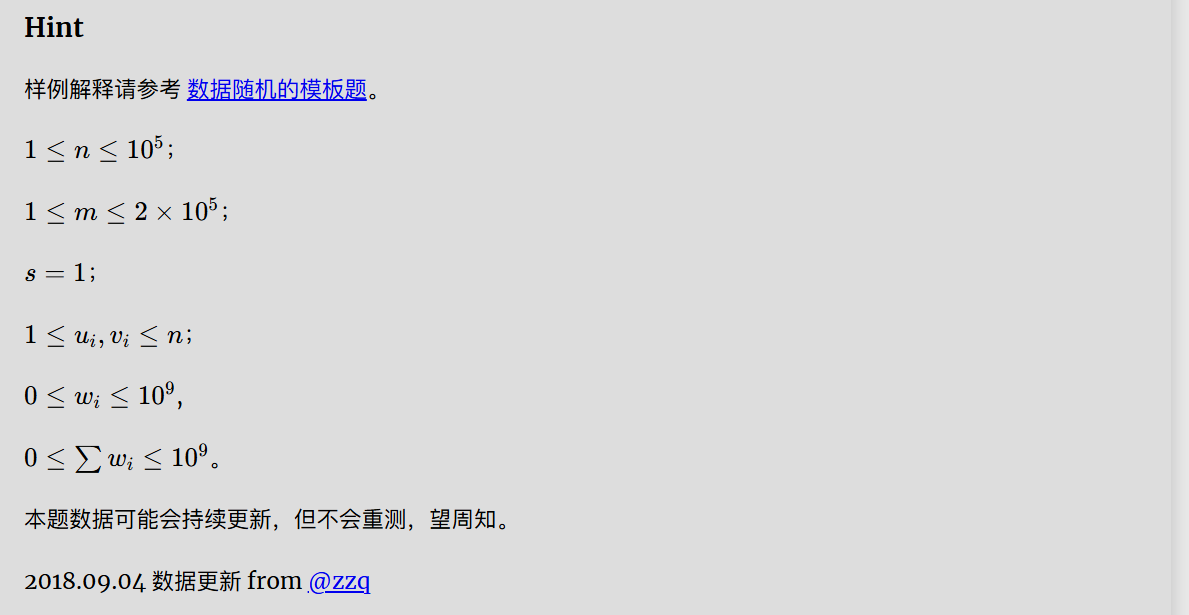
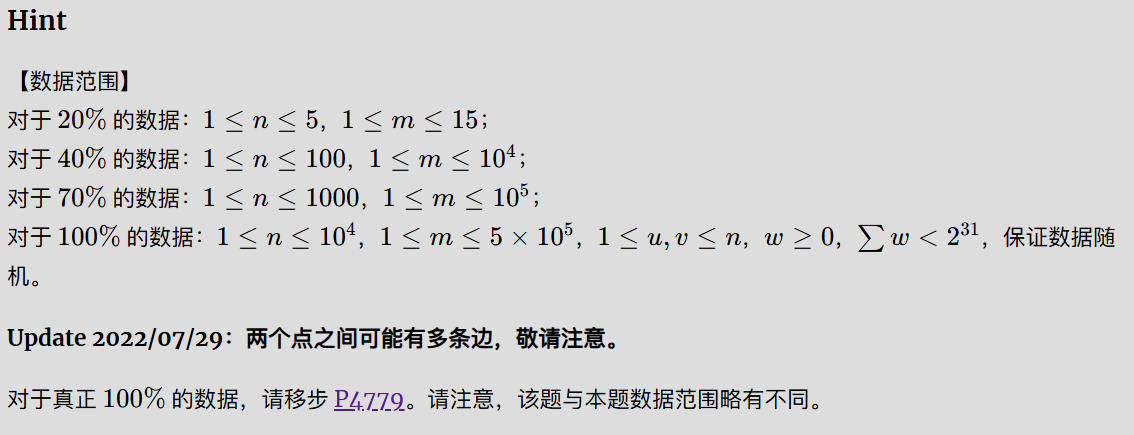
同样的题面,数据变大了。
关于一些疑问,D老师还是很权威的:
以这个为例:
4 6 1
1 2 2
2 3 2
2 4 1
1 3 5
3 4 3
1 4 4
理论输出:0 2 4 3
首先(0,1)入队,然后得到(2,2) (4,4) (5,3),都会入队。
但是(4,4) (5,3)显然不是最优解,
那么请问这是怎么过滤掉的?
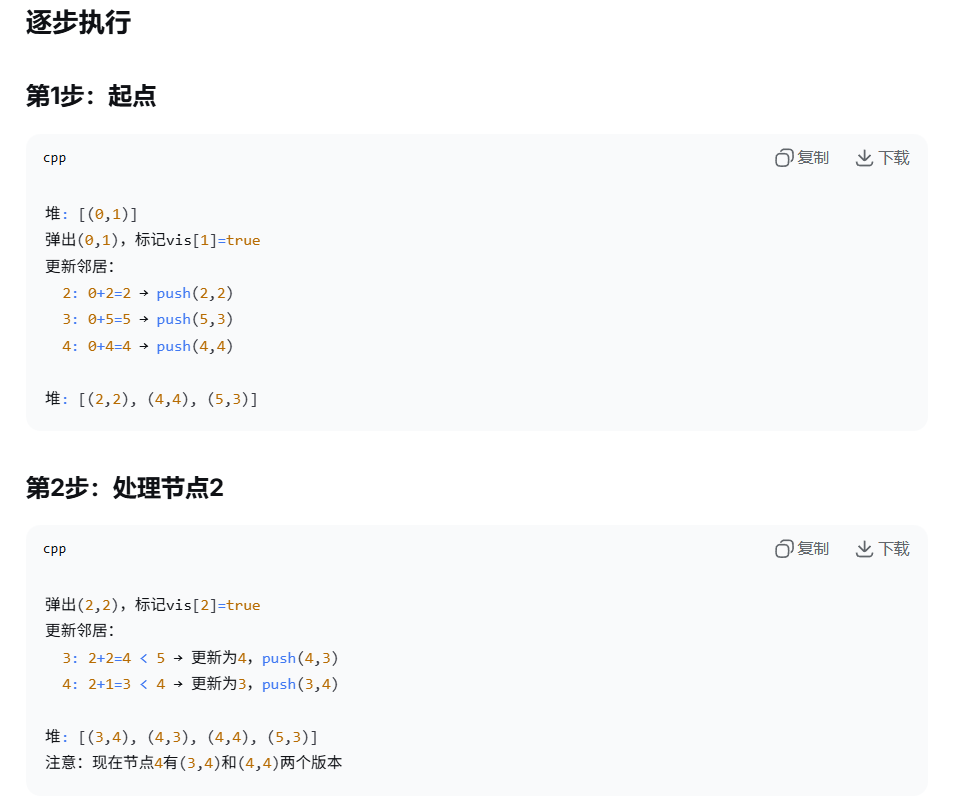

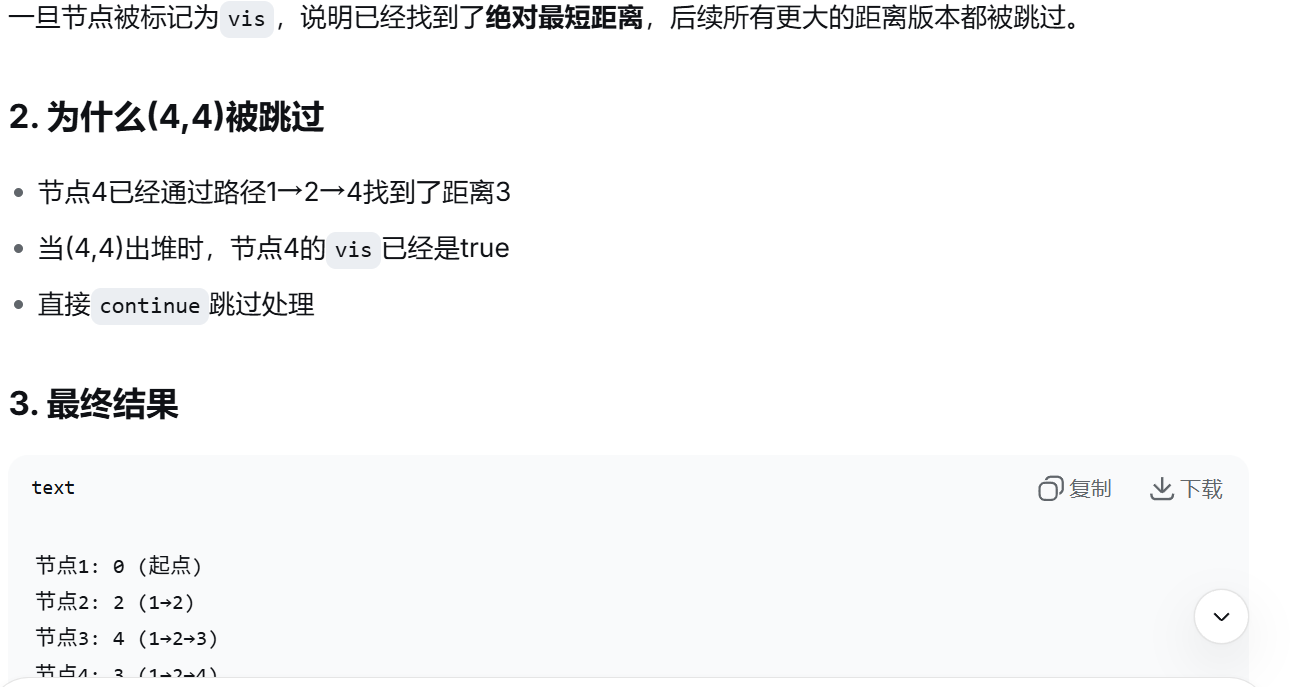
有一些过程解不是最优解,会因为小根堆的排序而排到后面去。
然后因为vis标记,所以你从队列首部取出来的必定是最优解,等到你做完一圈最优解之后,尽管还有一些糟粕解留在队列里,但是因为vis=1被跳过。(比如第五步,这题里的4,45,3)。
Code
cpp
#include<iostream>
#include<cstring>
#include<vector>
#include<queue>
using namespace std;
struct node{
bool vis;
int res,pre;
}di[100005];
int n,m,s,u,v,w;
vector<vector<pair<int,int> > > a(100005);
priority_queue<
pair<int,int>,
vector<pair<int,int> >,
greater<pair<int,int> >
//存储的数据类型,底层容器,比较函数(小顶堆,最小元素在堆顶,先一后二)
> pq;
void init();
void dijkstra();
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
cin>>n>>m>>s;
init();
for(int i=1;i<=m;i++){
cin>>u>>v>>w;
a[u].push_back({v,w});
}
dijkstra();
for(int i=1;i<=n;i++){
cout<<di[i].res<<' ';
}
cout<<endl;
return 0;
}
void init(){
for(int i=1;i<=n;i++){
di[i].vis=0;
di[i].res=2147483647;
di[i].pre=i;
}
}
void dijkstra(){
di[s].res=0;//起始位置res等于0
pq.push({0,s});//距离、节点
while(!pq.empty()){
int lst=pq.top().second;//上一个元素
pq.pop();//一定要及时出队!
if(di[lst].vis)
continue;
di[lst].vis=1;
//lst上一个 nxt下一个 wei权值
for(int i=0;i<a[lst].size();i++){
int nxt=a[lst][i].first;
int wei=a[lst][i].second;
if(di[lst].res+wei<di[nxt].res){
di[nxt].res=di[lst].res+wei;
di[nxt].pre=lst;
pq.push({di[nxt].res,nxt});
}
}
}
}G
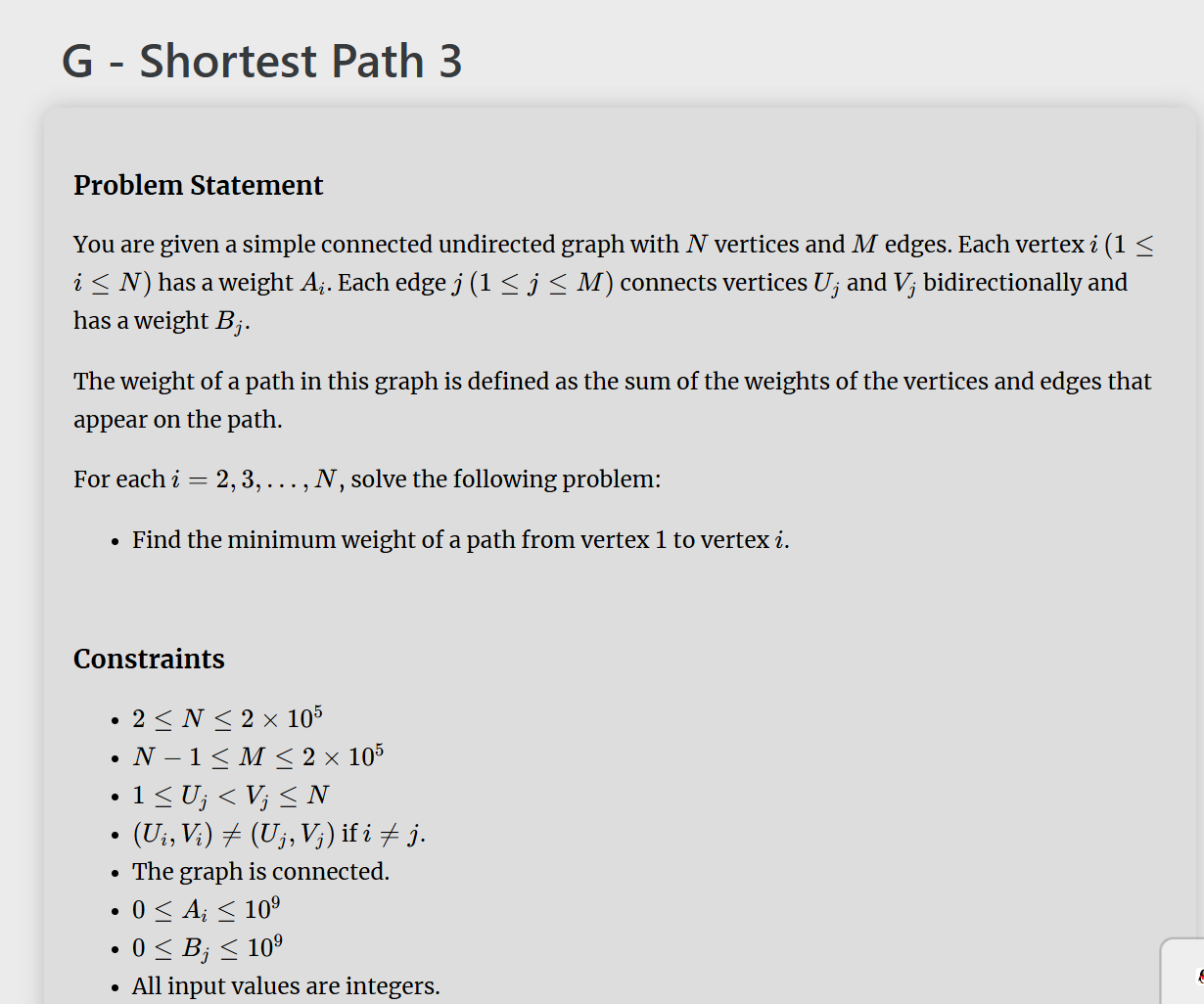
变种dijkstra
有向图->无向图。"You are given a simple connected undirected graph......"
只有边权重->点也有权重。
其实想通了也很简单,把点权重和边权重加一起就行了。然后起始距离不是0而是第一个点权重。
cpp
for(i64 i=1;i<=m;i++){
cin>>u>>v>>w;
a[u].push_back({v,w});
a[v].push_back({u,w});
}
di[s].res=b[s];//起始位置res等于0
pq.push({b[s],s});//距离、节点
if(di[lst].res+wei+b[nxt]<di[nxt].res){
di[nxt].res=di[lst].res+wei+b[nxt];
di[nxt].pre=lst;
pq.push({di[nxt].res,nxt});
}H
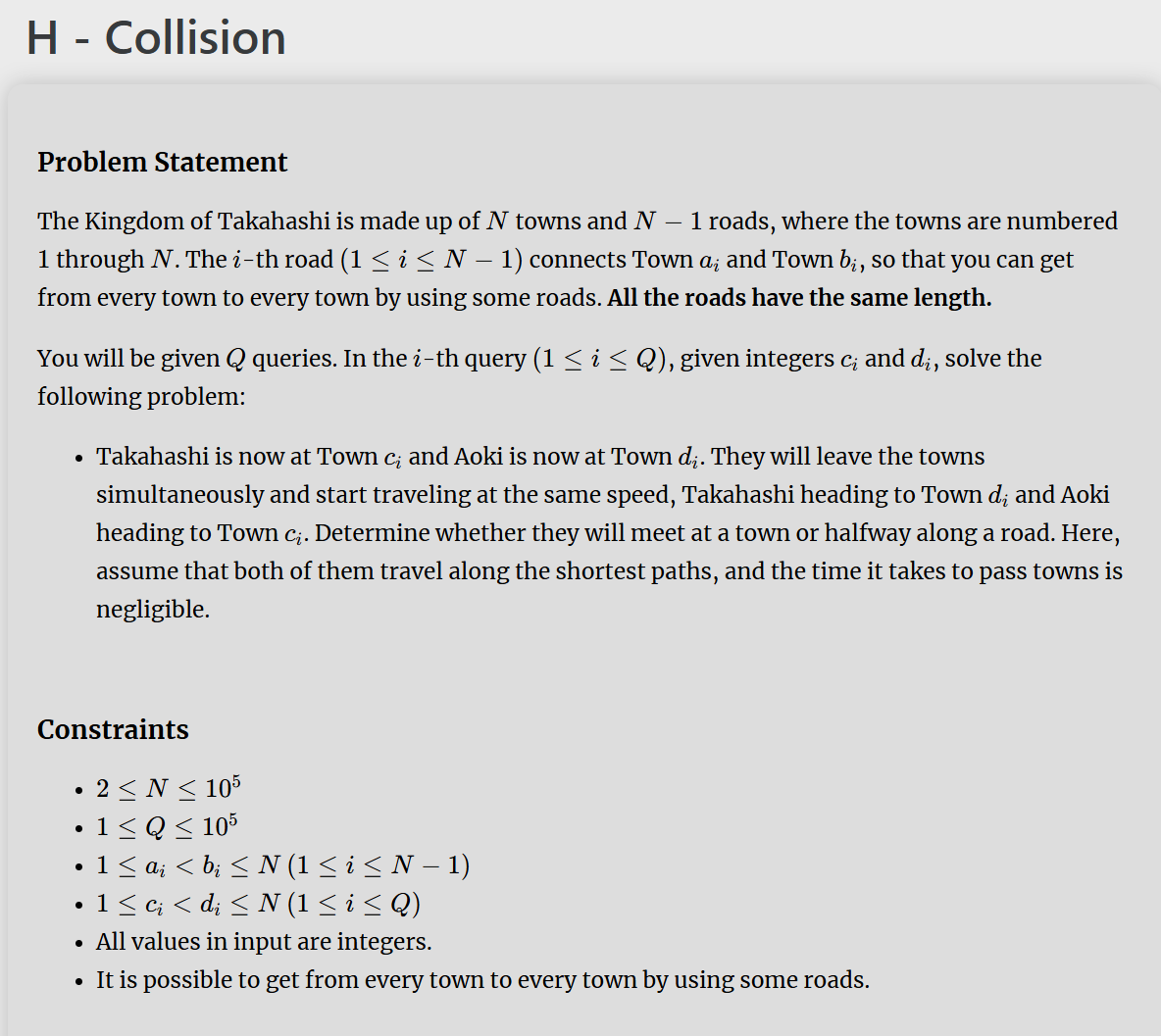
这一题我比较明确是什么意思,但是想不到有什么高效解法,又去问了D老师。
原来可以把这张图看成树,先定一个节点(我定1),然后计算所有点距离根节点的距离。
然后又给出了一个公式:
距离 = depthc + depthd - 2 × depthlca(c,d)
距离%2==1 输出Road;距离%2==0 输出Town。
lca是什么?

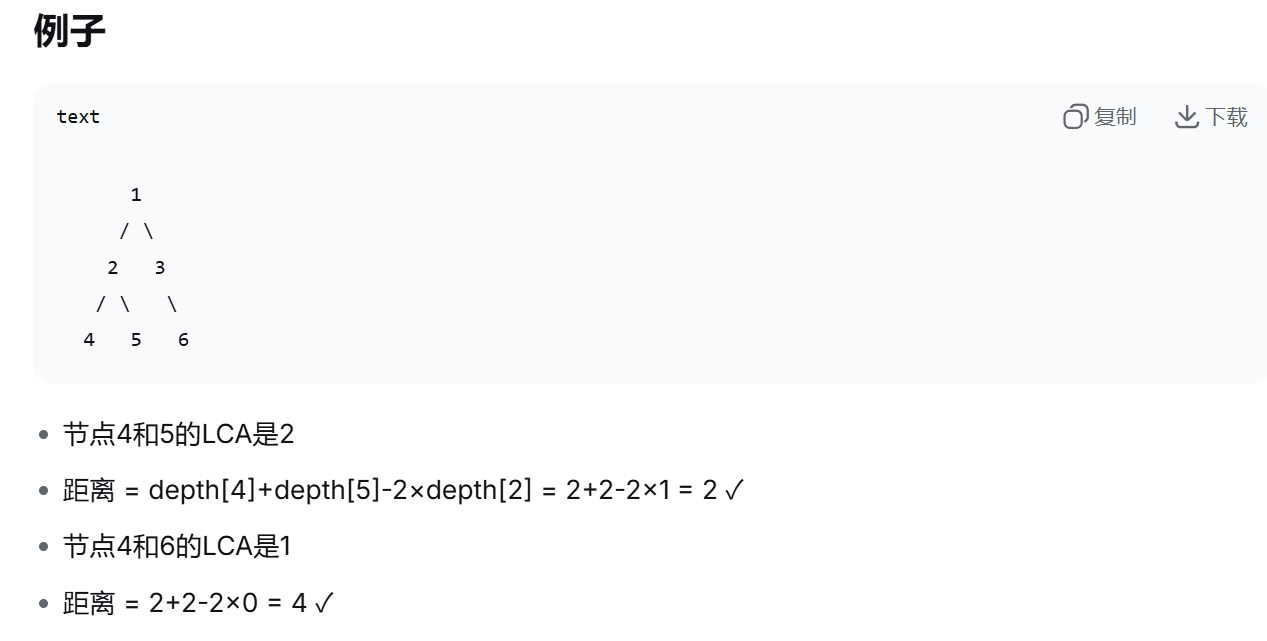
实际上和lca无关,因为 2 × depthlca(c,d)%2==0 ,不影响结果。本来想学的,但是看着很抽象,什么"向上跳2^k步",劝退,劝退。
写到这里,我发现我有点搞不清
vector<int> a200005;
vector<vector<pair<int,int> > > a(100005);
这两玩意

cpp
#include<iostream>
#include<vector>
#include<queue>
#define i64 long long
using namespace std;
i64 n,q,u,v;
vector<i64> a[200005];
i64 dis[200005];
void bfs();
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
cin>>n>>q;
for(i64 i=1;i<=n-1;i++){
cin>>u>>v;
a[u].push_back(v);
a[v].push_back(u);
}
bfs();
while(q--){
cin>>u>>v;
i64 ans=dis[u]+dis[v];
if(ans%2==1) cout<<"Road"<<endl;
else if(ans%2==0) cout<<"Town"<<endl;
}
return 0;
}
void bfs()
{
bool s[200005];
queue<i64> q;
q.push(1);
s[1]=1;
i64 depth=0;
while(!q.empty()){
q.push(0);
++depth;
while(q.front()!=0)
{
i64 lst=q.front();
q.pop();
for(i64 i=0;i<a[lst].size();i++){
i64 nxt=a[lst][i];
if(s[nxt])
continue;
s[nxt]=1;
dis[nxt]=depth;
q.push(nxt);
}
}
q.pop();
}
}I
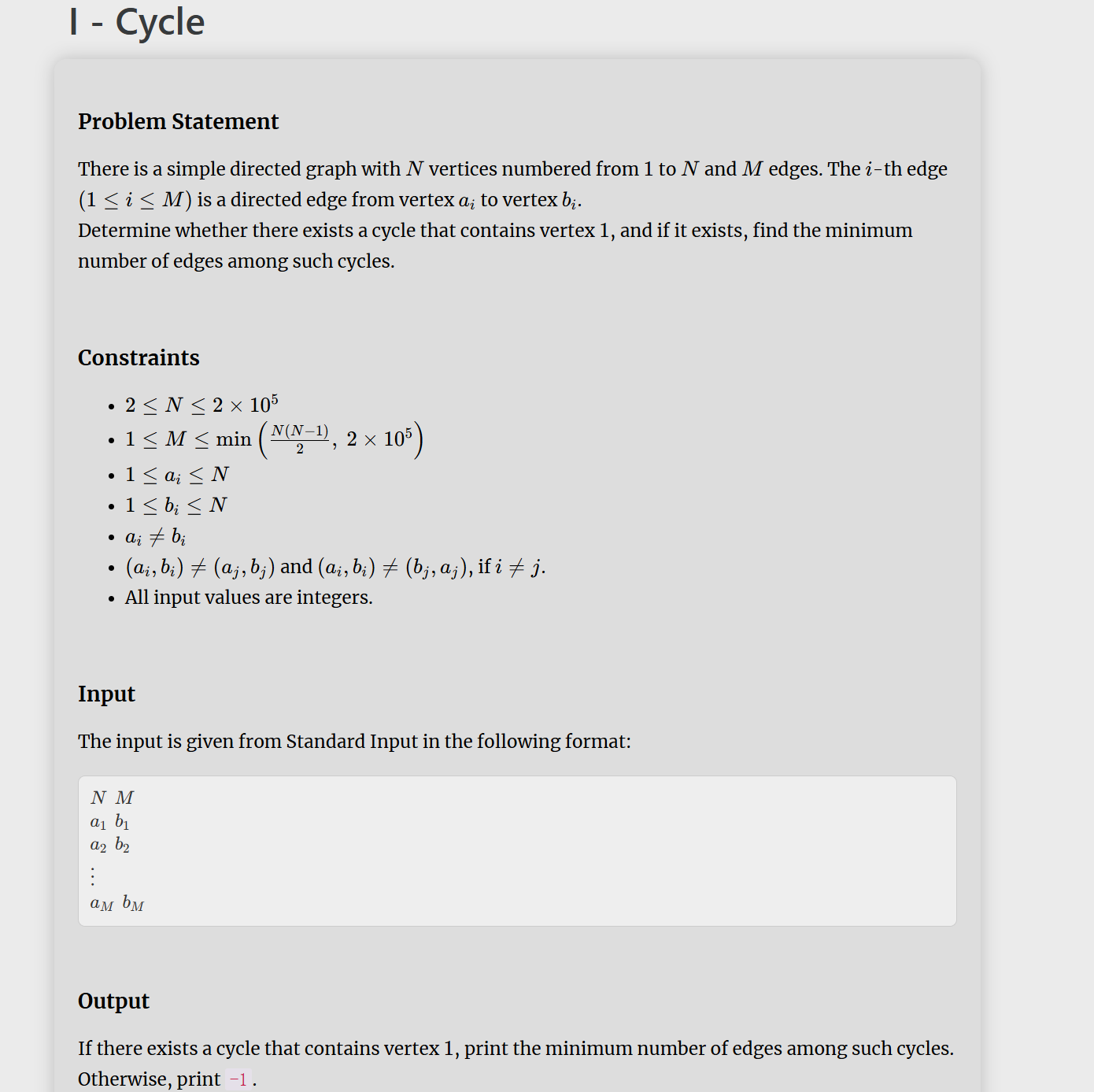
bfs记层可解,但是对32错7。
然后我发现,居然是一个代码冗余带来的灾难???
如果三个节点,但是只有两条边,是(1,2)(2,1),仍成立。
纪律性这一块
cpp
#include<iostream>
#include<vector>
#include<queue>
#define i64 long long
using namespace std;
i64 n,m,u,v;
vector<i64> a[200005];
void bfs();
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
cin>>n>>m;
for(i64 i=1;i<=m;i++){
cin>>u>>v;
a[u].push_back(v);
}
/*if(n>m){
cout<<-1<<endl;
return 0;
}*///错误代码
bfs();
return 0;
}
void bfs()
{
bool s[200005]={0},flag=0;
i64 depth=0;
queue<i64> q;
//s[1]=1;怀疑这点是不需要的
q.push(1);
while(!q.empty()&&!flag){
++depth;
q.push(0);
while(q.front()!=0&&!flag){
i64 lst=q.front();
q.pop();
for(int i=0;i<a[lst].size();i++){
int nxt=a[lst][i];
if(s[nxt])
continue;
if(nxt==1)//找到目标1
flag=1;
s[nxt]=1;
q.push(nxt);
}
}
q.pop();
}
while(!q.empty()){//队列全部放空,享受素质人生
q.pop();
}
if(flag) cout<<depth<<endl;
else cout<<-1<<endl;
return ;
}J

并查集的思路
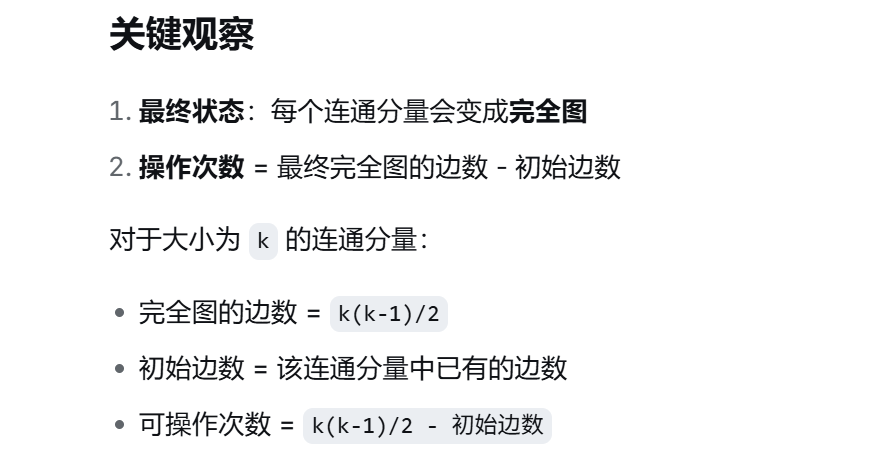
但是、对于每个连通分量,点数和边数如何统计?
我们可能想到,有那么多个点,但是只有几个连通分量,所以很难统计。可是实际上,往往都是空间换时间的过程,我们就开两个数组去存储边数和点数,就会方便很多。(这种思路很妙而且对于我这种初学者有点反直觉)
那么每两个点进来,就不仅是联合操作一次,而且边和点都要操作,实际上就是相加就可以了szx+=szy; edgex+=edgey+1;
这题一开始WA了两次,是因为 edgex++ 错写成 edgex=y ,edgex+edgey+1 错写成 edgex=edgey+1。
cpp
#include<iostream>
#define i64 long long
using namespace std;
i64 n,m,u,v,ans=0;
i64 pre[200005]={0},sz[200005]={0},edge[200005]={0};
void init();
void unite();
i64 find(i64 num);
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
cin>>n>>m;
init();
for(i64 i=1;i<=m;i++){
cin>>u>>v;
unite();
}
for(i64 i=1;i<=n;i++){
if(pre[i]==i){//自己
ans+=sz[i]*(sz[i]-1)/2-edge[i];
}
}
cout<<ans<<endl;
return 0;
}
void init(){
for(int i=1;i<=n;i++){
pre[i]=i;
sz[i]=1;//特别
}
}
void unite(){
i64 x=find(v),y=find(u);
if(x==y){
edge[x]=y;//如果两个点祖宗一致,那么单纯的边增加,不会带来点的问题。
return ;
}
//如果祖宗不一样,那么说明两个图之间变连通,原来两个点的点、边数据现在合并到一个点y上
pre[y]=x;//y依靠于x,那么x是核心
sz[x]+=sz[y];
edge[x]=edge[y]+1;
return ;
}
i64 find(i64 num)
{
if(pre[num]==num) return num;
else return pre[num]=find(pre[num]);
}K
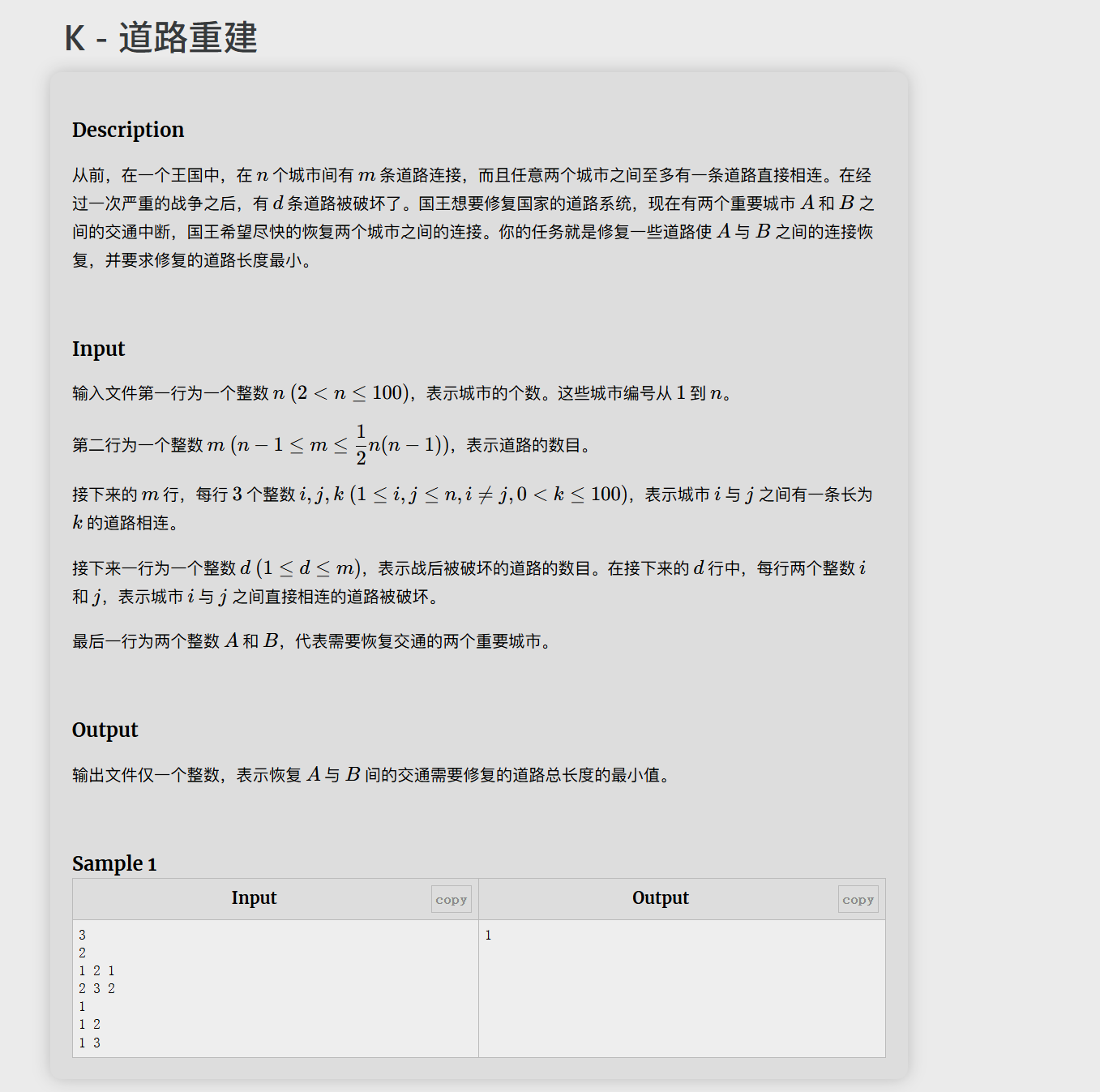
n<=100,那么懒得vector了,直接上邻接矩阵。
学到现在,算法无非就是dfs bfs 并查集 dijkstra,而现在分析题面的能力越来越重要了。
分析这题:灾后重建,有的桥带权,但是没有被破坏,所以实际上这个权不应该被计算进去。
如果把这个权置为0,那么是不是也是一个最短路径dijkstra?
所以我们借用一个数组操作一下,让没有被破坏的边权值变0,有破坏的边权值正常显示,其它都是MX。那么这题就结束了。
cpp
#include<iostream>
#include<queue>
#define MX 10086
#define i64 long long
using namespace std;
struct node{
bool vis;
int res,pre;
}di[105];
priority_queue<
pair<int,int>,
vector<pair<int,int> >,
greater<pair<int,int> >
> pq;
i64 n,m,t,u,v,w,st=0,ed=0,ans=0;
i64 a[105][105]={0};
bool broken[105][105]={0};
void init();
void dijkstra();
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
init();
cin>>st>>ed;
dijkstra();
return 0;
}
void dijkstra(){
di[st].res=0;
pq.push({0,st});
while(!pq.empty()){
i64 lst=pq.top().second;
pq.pop();
if(di[lst].vis)
continue;
di[lst].vis=1;
for(i64 i=1;i<=n;i++){
if(a[lst][i]==MX)
continue;
i64 wei=a[lst][i];
i64 nxt=i;
if(di[lst].res+wei<di[nxt].res){
di[nxt].res=di[lst].res+wei;
di[nxt].pre=lst;
pq.push({di[nxt].res,nxt});
}
}
}
/*for(int i=1;i<=n;i++)
cout<<di[i].res<<endl;*/
cout<<di[ed].res<<endl;
return ;
}
void init(){
cin>>n>>m;
//初始化全部是MX
for(i64 i=1;i<=n;i++){
di[i].res=MX;
for(i64 j=1;j<=n;j++){
a[i][j]=MX;
}
}
//开始输入路径
for(i64 i=1;i<=m;i++){
cin>>u>>v>>w;
a[u][v]=w;
a[v][u]=w;
}
//标记谁被破坏了
cin>>t;
for(i64 i=1;i<=t;i++){
cin>>u>>v;
broken[u][v]=1;
broken[v][u]=1;
}
//如果原来有路,而且没被破坏,道路置0
for(i64 i=1;i<=n;i++){
for(i64 j=1;j<=n;j++){
if(a[i][j]!=MX&&!broken[i][j]){
a[i][j]=0;
}
}
}
//输出演示
/*for(i64 i=1;i<=n;i++){
for(i64 j=1;j<=n;j++){
cout<<a[i][j]<<' ';
}
cout<<endl;
}*/
return ;
}M
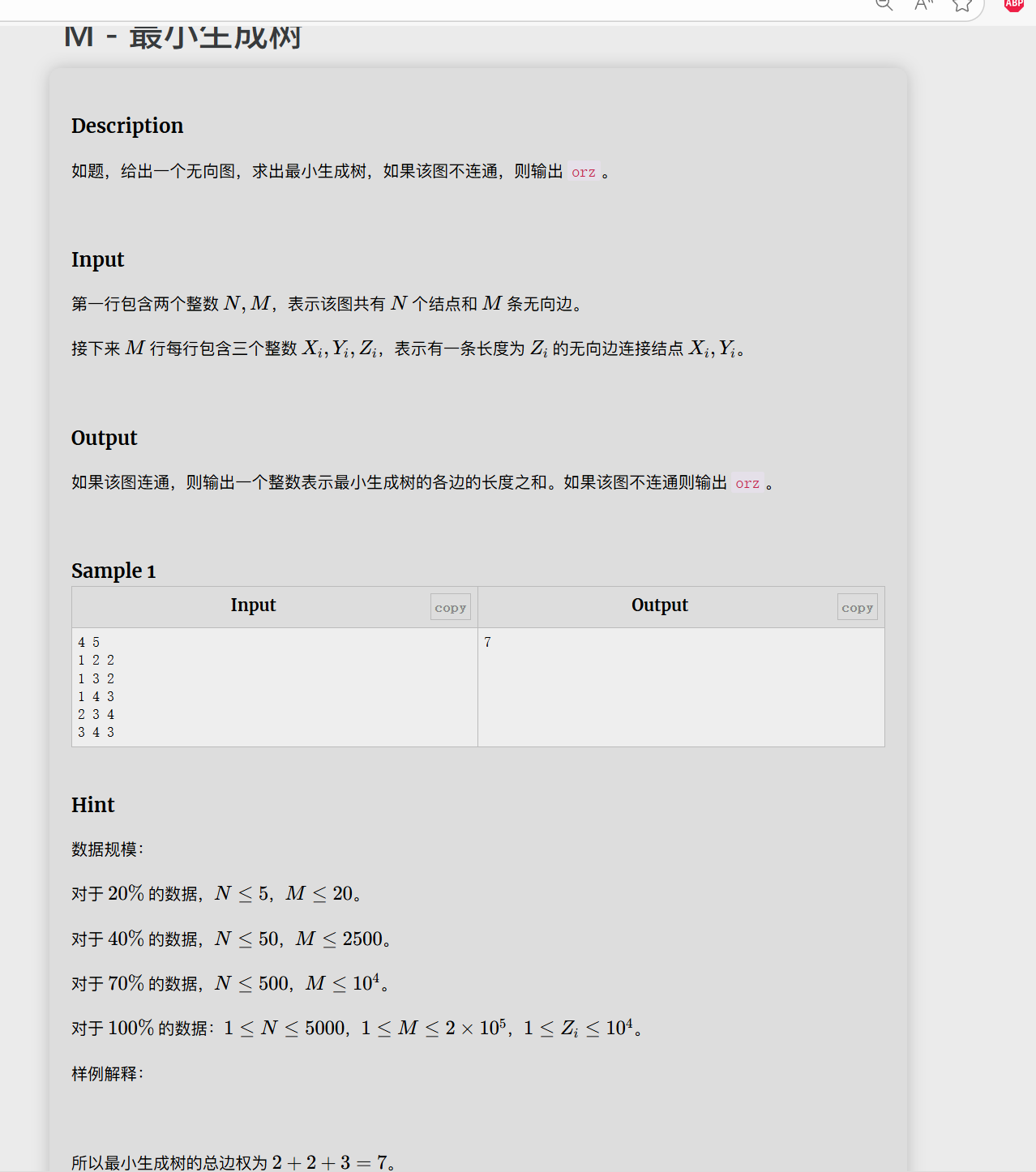
学了数据结构或者离散数学的都能知道Prim和Kruskal(避圈法)算法。算法很好理解,但是避圈法太难实现,所以我用prim。
我找的题解在这:最小生成树算法 - 洛谷专栏
其实不用完整看这个题解,你看一遍Prim的演示图你就知道这算法是个啥意思了。和迪杰斯特拉不能说一模一样但是确实是很像。内核都是bfs更新。不过最短路径着重点是点,最小生成树着重点是边。所以造成了判定条件略微的不一样。
然后这题依旧是稳定发挥交上去无法AC,因为一开始感觉a50055005还行,懒得用vector,但是MLE了4个点,所以只好换vector了。
cpp
#include<iostream>
#include<queue>
#define MX 10086
#define i64 long long
using namespace std;
i64 n,m,u,v,w,res=0;
i64 dis[5005]={0};
vector<pair<i64,i64> > a[5005];
bool s[5005]={0};
priority_queue<//来个堆更方便排序
pair<i64,i64>,
vector<pair<i64,i64> >,
greater<pair<i64,i64> >
> q;
void init();
void prim();
bool check();
int main(){
cin>>n>>m;
init();
for(i64 i=1;i<=m;i++){
cin>>u>>v>>w;
a[u].push_back({v,w});//可能存在重边
a[v].push_back({u,w});
}
prim();
if(check()) cout<<res<<endl;
else cout<<"orz"<<endl;
return 0;
}
void init(){
for(i64 i=1;i<=n;i++){
dis[i]=MX;
}
return ;
}
void prim(){
//把1作为根节点
dis[1]=0;
q.push({0,1});//路径在前节点在后,堆根据这样排序
while(!q.empty()){
i64 lst=q.top().second;//取出队首,能被取出来的一定是贪心最优解
i64 distance=q.top().first;
q.pop();
if(s[lst]==1)//如果被遍历过
continue;
s[lst]=1;
for(i64 i=0;i<a[lst].size();i++){
i64 nxt=a[lst][i].first;
i64 wei=a[lst][i].second;
if(s[nxt]) continue;
if(wei>=dis[nxt]) continue;
dis[nxt]=wei;
q.push({wei,nxt});
}
}
return ;
}
bool check(){
for(i64 i=1;i<=n;i++){
if(dis[i]==MX){
return 0;
}
res+=dis[i];
}
return 1;
}N
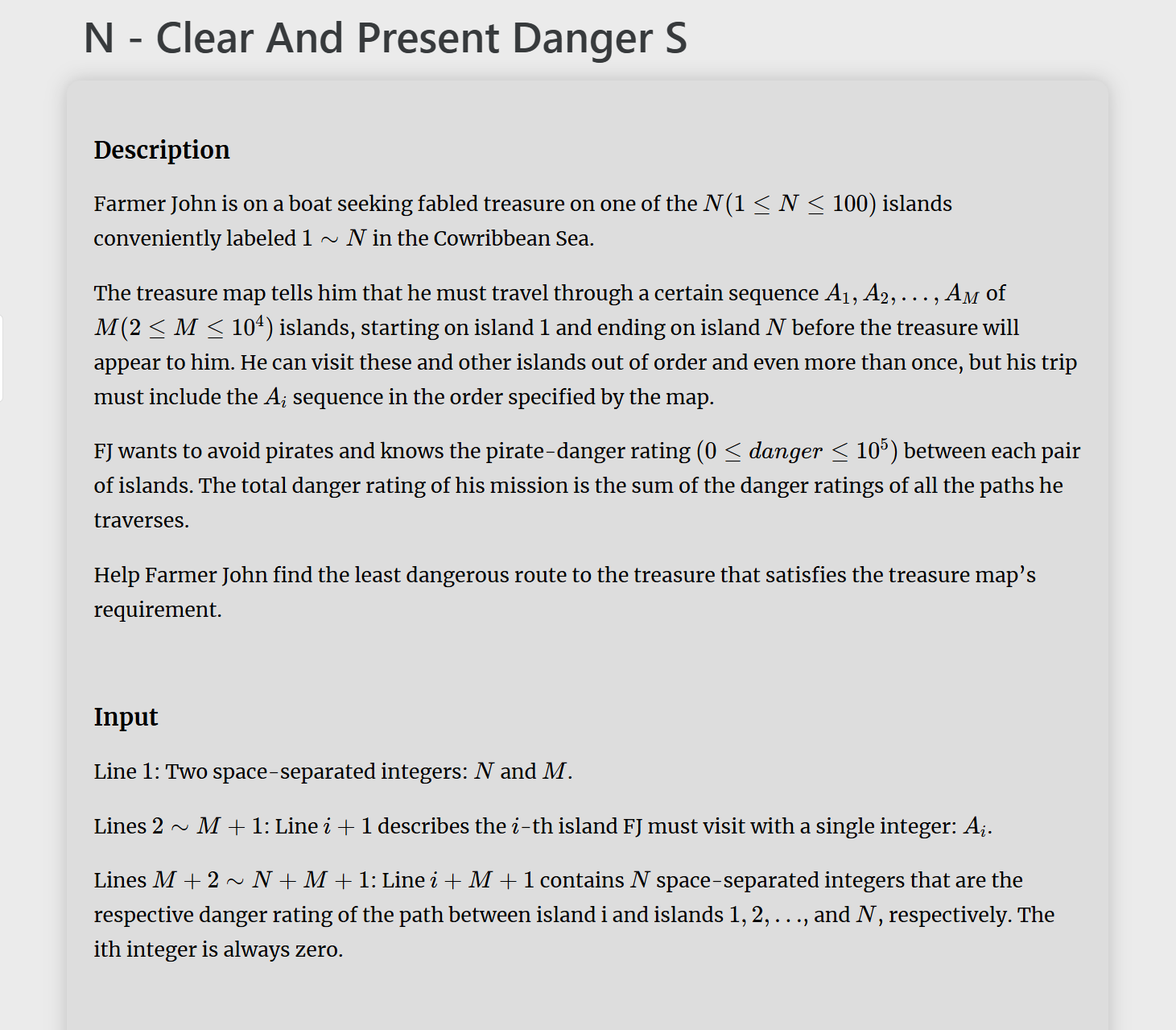
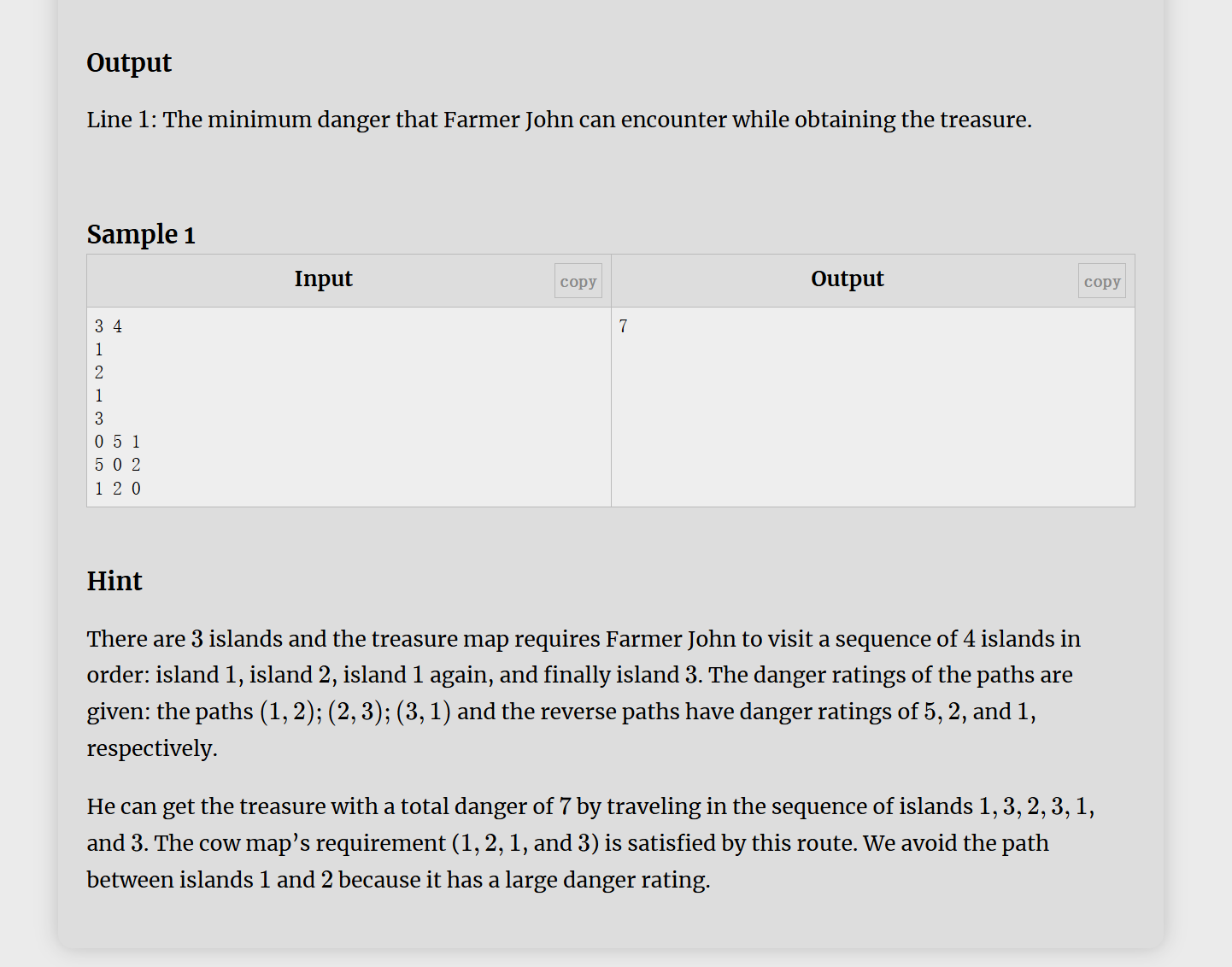
我一开始以为,这又是一个复杂的一批的题目,打开洛谷,啊?橙题?啊?题解代码这么短?
首先看这题可能被这个路径给吓到了,但是实际上我们并不关注中间还要经过多少额外节点,这题直接就是一个M个点之间的最短路径求和问题,不就行了?
所以这个纯纯就是纸老虎。我们只需要求出每个点对每个点的最短路径就行了。而Floyd算法复杂度为O(n3),100的数据恰到好处不会TLE。那么a不断更新就可以了。
不过,身为菜鸟级选手,为啥floyd这么写捏?
中间这一行是个dp更新最小值,很好理解,难的就是怎么理解k在i和j的前面。
这个文章描述的很好,D老师描述的我倒是没怎么理解到。
https://blog.csdn.net/qq_43753724/article/details/129507989
cpp
#include<iostream>
#define MX 10086
#define i64 long long
using namespace std;
i64 a[105][105]={0}, b[10005]={0};
i64 n,m,ans=0;
void floyd();
int main(){
cin>>n>>m;
for(i64 i=1;i<=m;i++){
cin>>b[i];
}
for(i64 i=1;i<=n;i++){
for(i64 j=1;j<=n;j++){
cin>>a[i][j];
}
}
floyd();
for(i64 i=2;i<=m;i++){
ans+=a[b[i-1]][b[i]];
}
cout<<ans;
return 0;
}
void floyd(){
for(i64 k=1;k<=n;k++){
for(i64 i=1;i<=n;i++){
for(i64 j=1;j<=n;j++){
a[i][j]=min(a[i][j],a[i][k]+a[k][j]);
}
}
}
return ;
}