
本文作者:茉卷,TRAE 开发者用户

背景
TurboPi 是一款由 Raspberry Pi 5 驱动的智能 AI 视觉机器人车套件, 配备 Mecanum 轮实现 360° 全向移动,2DOF 云台支持 360° 摄像头视角,具备面部检测、手势识别和二维码控制功能。
本文将介绍如何利用 TRAE + Spec-kit 实现一个控制小车方向的 前后端系统。
实现目标
前置条件:树莓派小车与 PC 需在同一局域网内
-
在 PC 上实现一个 React 前端页面,用来连接、控制小车移动。
-
在树莓派小车上,实现一个 FastAPI 后端,用来接收命令并执行。


Spec-kit 初始化
详细步骤,请大家查看 之前的公众号文章:TRAE × Spec Kit 实战:五步构建流式 AI 对话 Web 应用
示例我的项目路径 (turbopi_backend):
bash
/Users/susirial/work_station/Turbopi/Turbopi_ios/spec_turbopi_backend/spec-kit-main/turbopi_backend
Spec-kit 关键 步骤执行
我们需要依次执行以下命令生成关键文档:
-
/speckit.constitution - 生成项目章程
-
/speckit.specify - 生成需求规格
-
/speckit.plan - 生成技术方案
-
/speckit.tasks - 生成任务拆分
-
/speckit.implement - 执行代码实现
3.1 /speckit.constitution
第一步,生成项目章程文档,大家根据需求设定即可。
模型: GPT-5
输入指令:
注意:#speckit.constitution.md 需要通过 # 号选中文档(后续步骤同理)
arduino
#speckit.constitution.md 制定以代码质量、测试标准、用户体验一致性及性能要求为核心的原则

输出: TRAE 生成项目宪章文档 constitution.md 并更新相关模板。
3.2 /speckit.specify
接下来是需求说明:
模型: GPT-5
输入指令:
arduino
#speckit.specify.md 我有一个树莓派小车 Turbopi, 它是UBUNTU系统 ,它支持ROS2 系统。 我想实现一个后端,这个后端可以控制小车的方向,摄像头,其上搭载的LLM模型服务、LED等等组件。
输出: TRAE 生成 SPEC 文档和需求文档。
markdown
# 规格质量检查清单 - Turbopi 控制后端(ROS2)
**Created** : 2025-10-28
**Spec Path** : `turbopi_backend/specs/001-ros2-control-backend/spec.md`
## 检查范围
- 覆盖用户故事、边界场景、功能性需求、关键实体与可度量成功指标。
- 面向技术无关的规范与交付质量门槛,不涉及具体技术栈实现。
## 一、代码质量(语义一致性、错误统一、可维护性)
- [PASS] 指令与状态语义统一(CarCommand/CarState 命名清晰且可追踪)。
- [PASS] 统一错误结构(message/code/details/request_id)在 FR-007 明确。
- [PASS] 安全急停与超时回退语义独立、互不依赖,便于隔离测试。
- [PASS] LLM 能力默认与行驶控制隔离,需安全评估后再联动(FR-005)。
- [NOTE] 授权方式未定(FR-008 标记 NEEDS CLARIFICATION)。
- [PASS] 运行时模式(macbook_sim / raspberry_pi_ros2)与统一 API 语义一致(FR-012/FR-016)。
- [PASS] ROS2 控制语义(`cmd_vel` 发布与停止时 `Twist()` 清零)明确(FR-014)。
- [NOTE] 远程代码执行的沙箱/资源限制策略待定(FR-015 标记 NEEDS CLARIFICATION)。
## 二、测试标准(独立可测、验收场景、结果可观测)
- [PASS] 每个用户故事声明独立测试路径,最小可测 MVP 明确。
- [PASS] 验收场景采用 Given/When/Then,结果有"状态/反馈"锚点。
- [PASS] 边界场景覆盖硬件不可用/服务离线/网络中断等重要异常。
- [NOTE] 建议在实现阶段补充"通信丢失超时值"的确定性测试门槛。
- [PASS] Zeroconf 服务发现验收场景覆盖 macbook 与树莓派两种模式,前端可读取服务基本信息。
- [PASS] 远程代码执行端点具备可观察输出(stdout/stderr/exit_code)与 `job_id` 跟踪。
## 三、用户体验一致性(反馈一致、跨子系统协同)
- [PASS] 行驶/摄像头/LED/LLM 的反馈结构一致,便于统一 UI 显示。
- [PASS] LED 可映射系统状态(录制/急停/LLM 处理中),降低认知负担。
- [PASS] 基础能力(行驶与急停)优先交付,其他能力独立递进。
- [NOTE] LLM 回复与控制权限边界需在实施期做明示提示与开关控制。
- [PASS] 统一 API 在两种模式下保持一致,避免前端分叉逻辑(FR-012/FR-016)。
- [PASS] 服务发现结果包含模式标签,前端可正确呈现运行环境。
## 四、性能与可度量目标(技术无关、面向体验)
- [PASS] 行驶指令反馈 ≤1s(95%),摄像头预览 ≤2s、快照 ≤1s(95%)。
- [PASS] LED 控制 ≤0.5s(95%);LLM 文本回复 ≤5s(90%)。
- [PASS] 急停 100% 在安全时间窗内完成并返回停止状态。
- [NOTE] 安全时间窗及通信超时阈值需在实施时固化为配置常量。
- [PASS] Zeroconf 发现成功率 ≥95%,发现耗时 ≤3s(典型网络)。
- [PASS] 远程代码执行 trivial 片段 ≤1s 返回(90%),阻塞代码 100% 触发超时并返回错误。
## 结论
- 当前规格满足"代码质量、测试标准、体验一致性、性能指标"的四项宪法原则要求。
- 存在 3 处必要澄清:
1) 是否允许 LLM 触发行驶指令(需安全评估)。
2) 通信丢失/超时回退的阈值(需配置与测试门槛)。
3) 授权方式(令牌/账号/局域网白名单等)待明确。
新增澄清项:
4) Zeroconf 服务类型与 TXT 字段约定(与 iOS 发现兼容)。
5) 远程代码执行的沙箱策略(白名单库、资源限制、超时策略)。
这些澄清不影响当前规格作为实施输入的可用性,可在技术方案阶段冻结。3.3 /speckit.plan
接下来,我们描述一下技术实现细节要求。
模型: GPT-5
输入指令:
arduino
#speckit.plan.md 后端需要使用 python FastApi 实现。 需要 使用 zeroconf 来生成 turbopi_backend 服务可以让iOS前端NetServiceBrowser 的搜索到。需要做一个运行时开关,开发时是在macbook上,所以需要区分macbook 和树莓派ubuntu. 树莓派的控制是在ROS2上,通过 import rclpy 来控制,比如控制小车前进 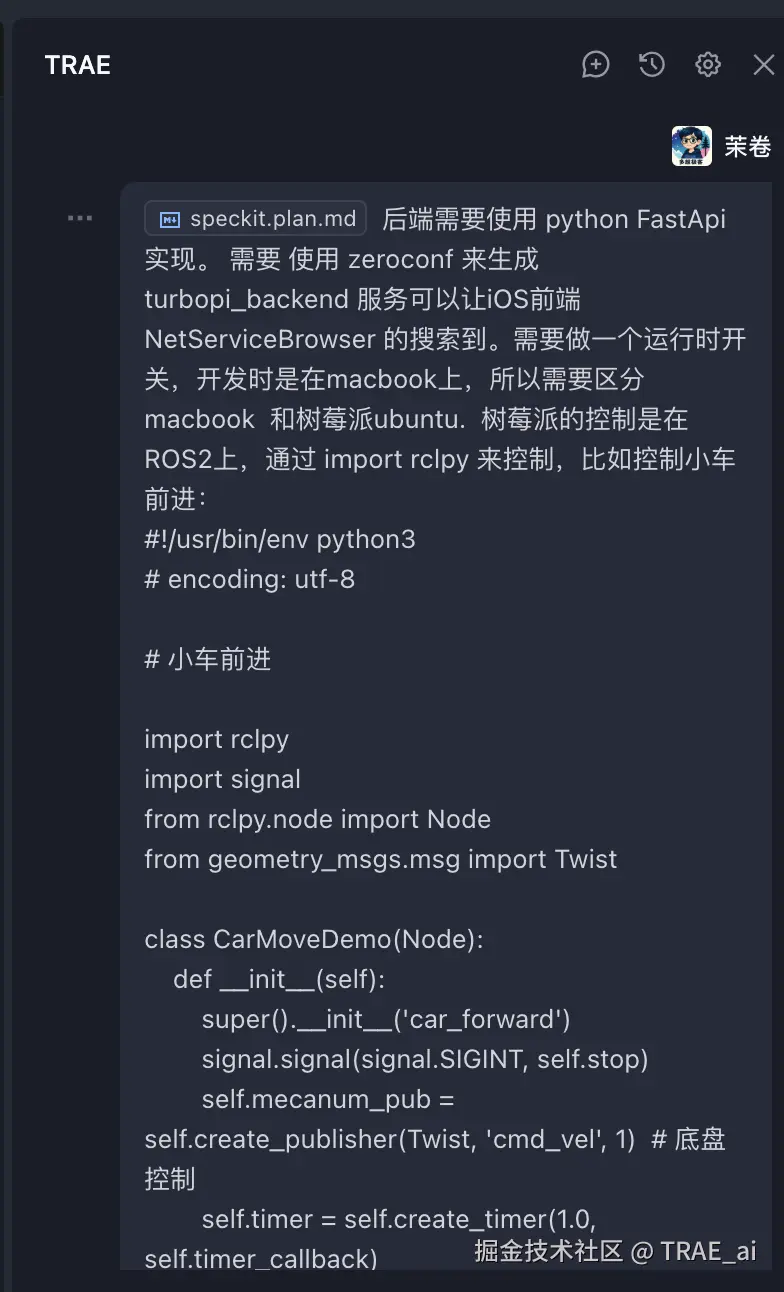

输出: TRAE 更新 SPEC 文档和需求文档。
3.4 /speckit.tasks
接下来,需要让 TRAE 拆分出任务。
模型: GPT-5
输入指令:
arduino
#speckit.tasks.md 详细拆分出完整的task
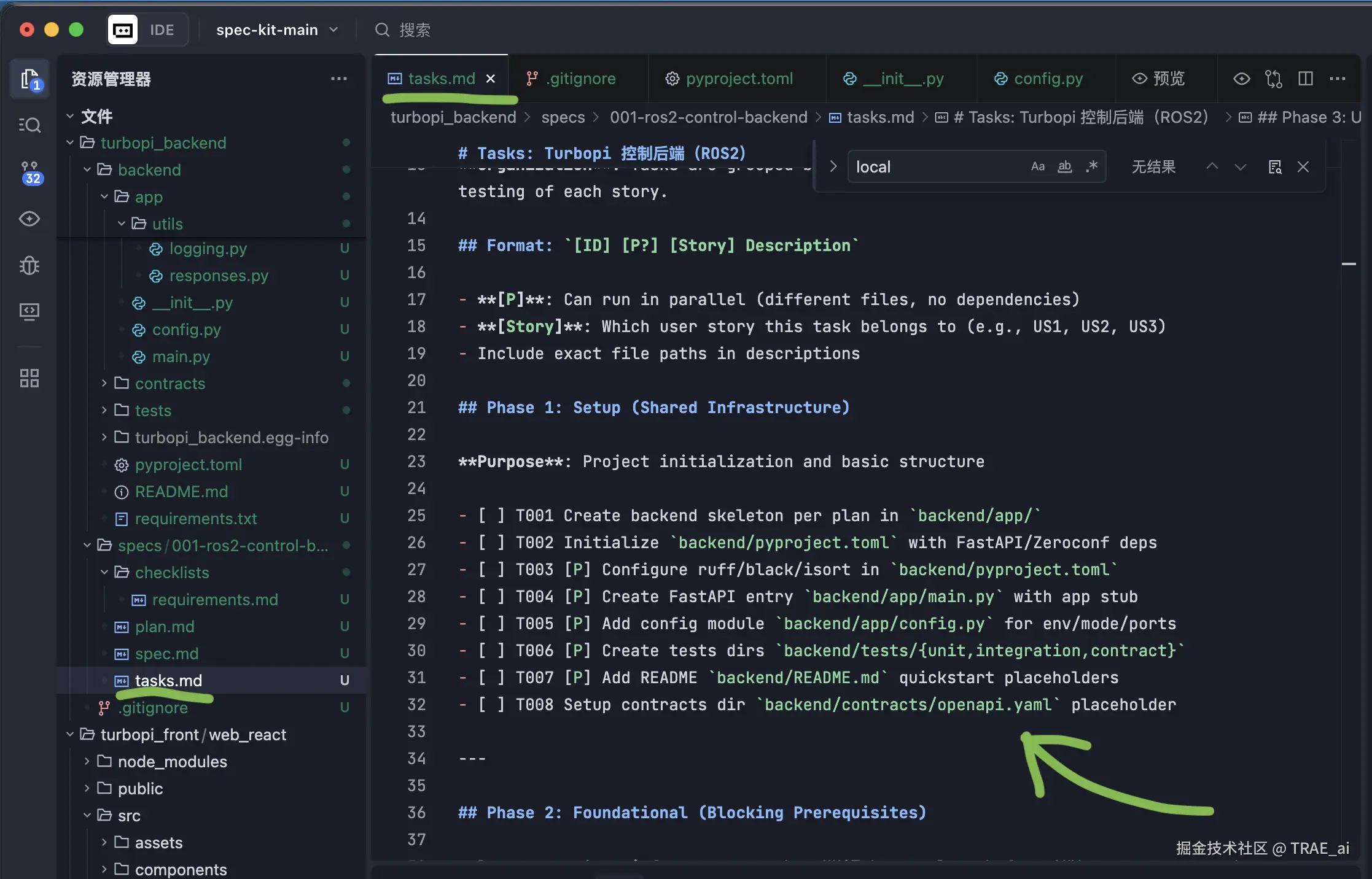
3.5 /speckit.implement
接下来,我们让 TRAE 开始编码。
输入指令:
arduino
#speckit.implement.md 开始实施 Phase 1,Phase 2,Phase 3

优化
4.1 修复代码问题
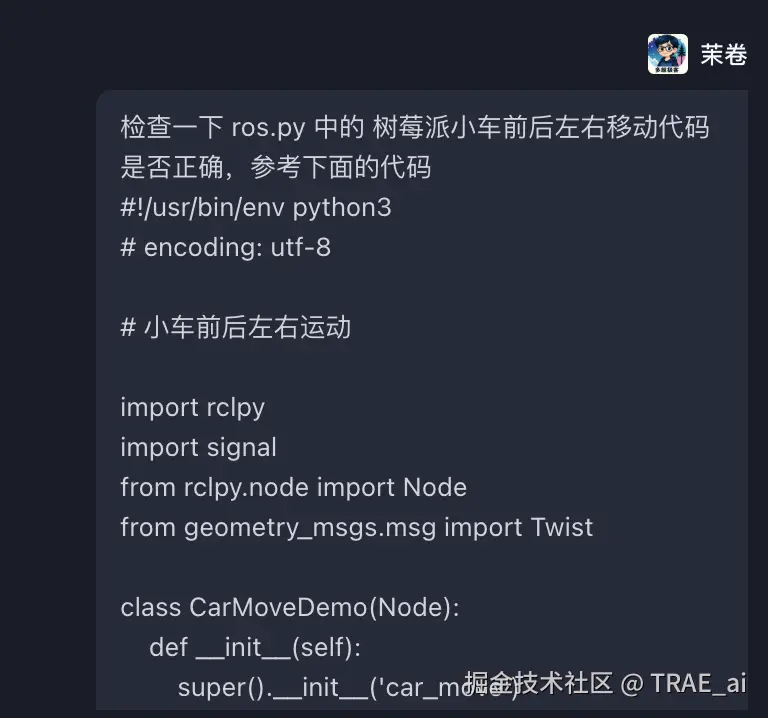
这里我 review 了一下代码,发现对于小车的方向控制部分,模型生成的代码有问题:Y 应该表示小车横向移动,而不是 Z (这个通过阅读厂商参考代码可以发现)。
于是我贴了一些参考代码给 TRAE,让它自己修复。
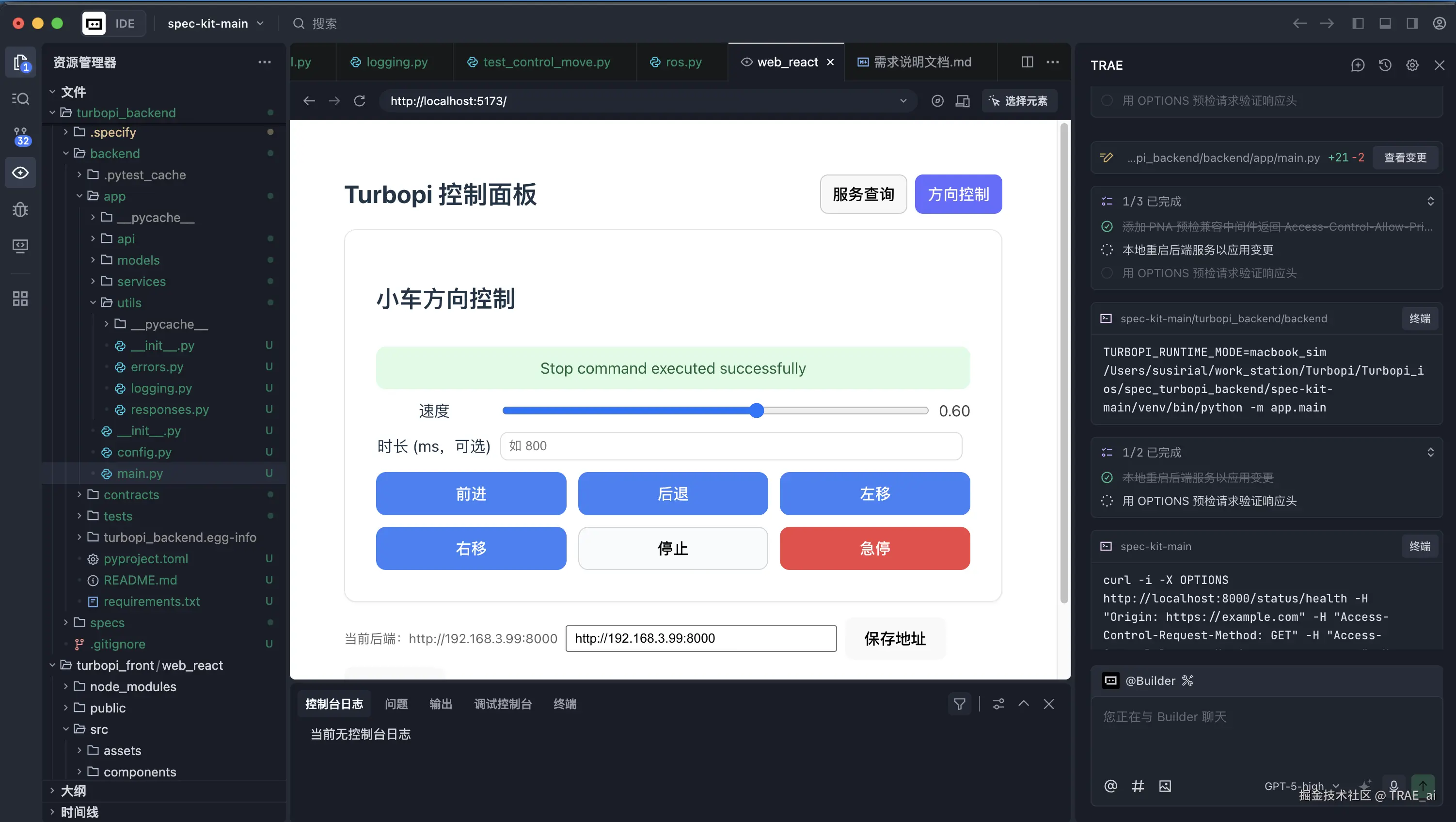
4.2 前端测试页面
我们需要一个前端页面来测试,于是我让 TRAE 写一个前端来测试(这里只是一个测试页面,没有用框架)。
输入指令:
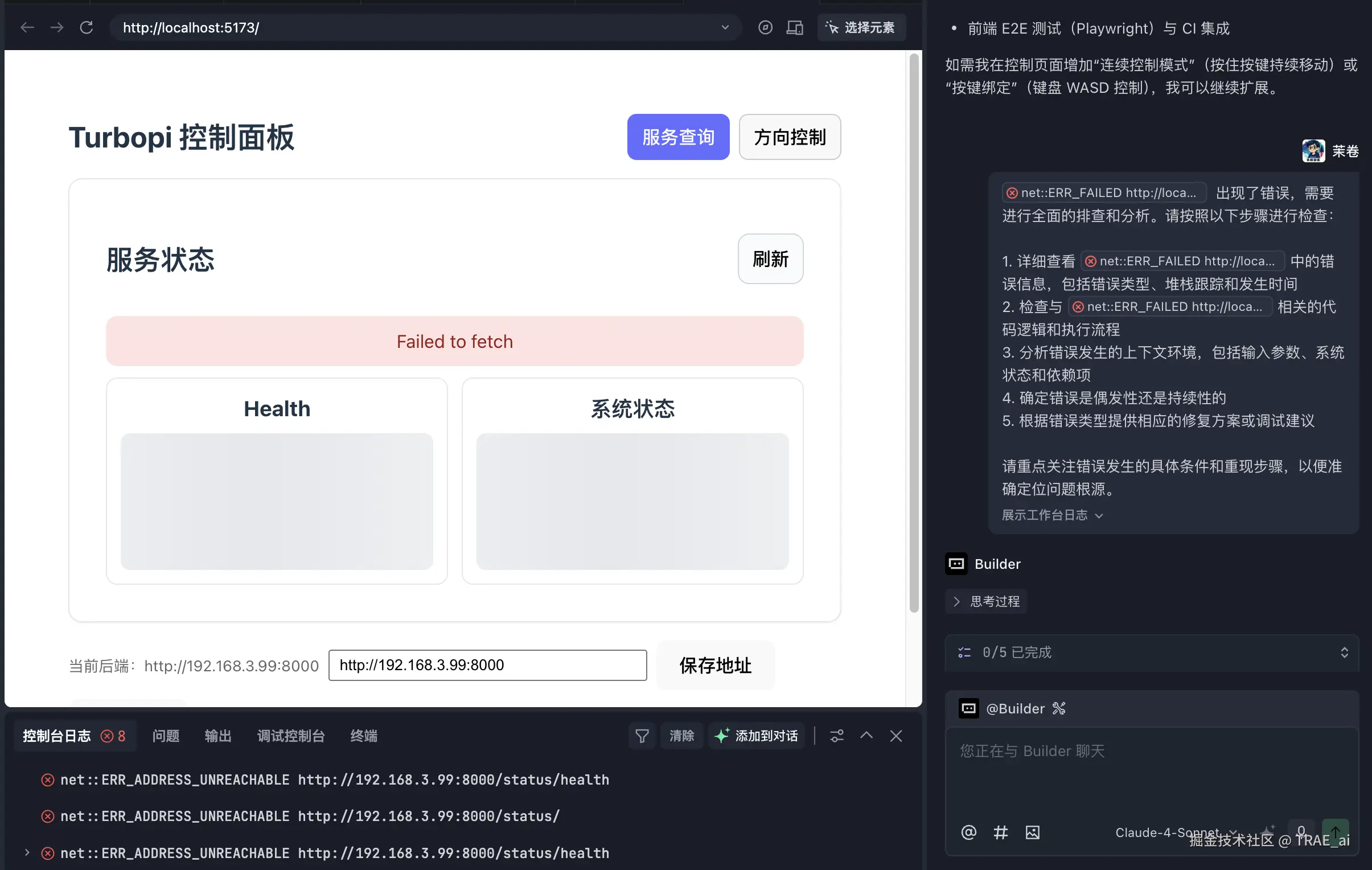
参考 backend 后端代码,实现一个vite react 的前端页面,支持查询服务,然后给出一个测试树莓派小车前后左右控制的前端页面,页面的风格需要美观、符合国际一流最佳实践。给出需求说明文档,放到 web_react 目录下面
页面有些问题,将底部的错误输入到 TRAE 对话框,让它检查,修复。
4.3 启动后端服务
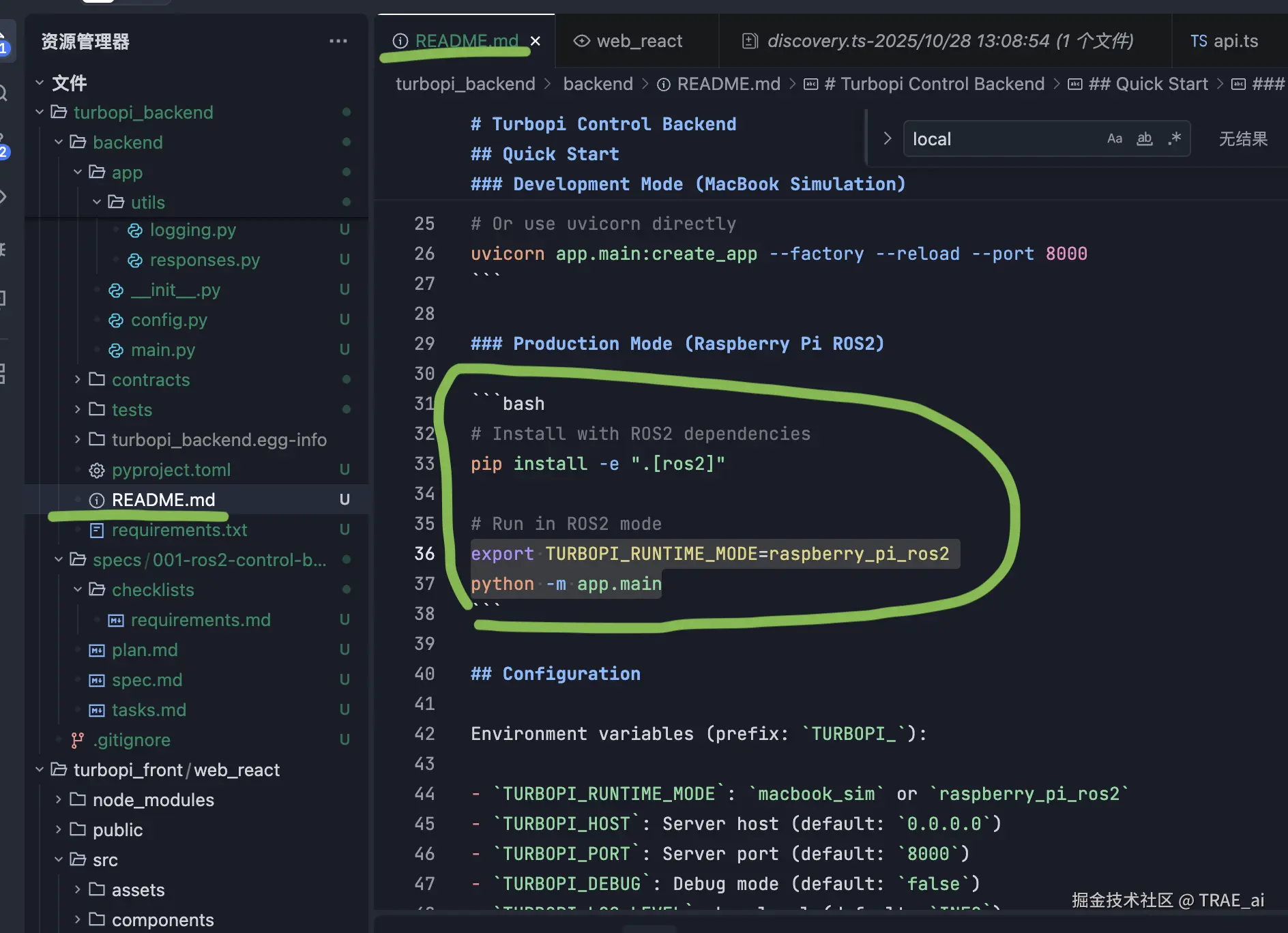
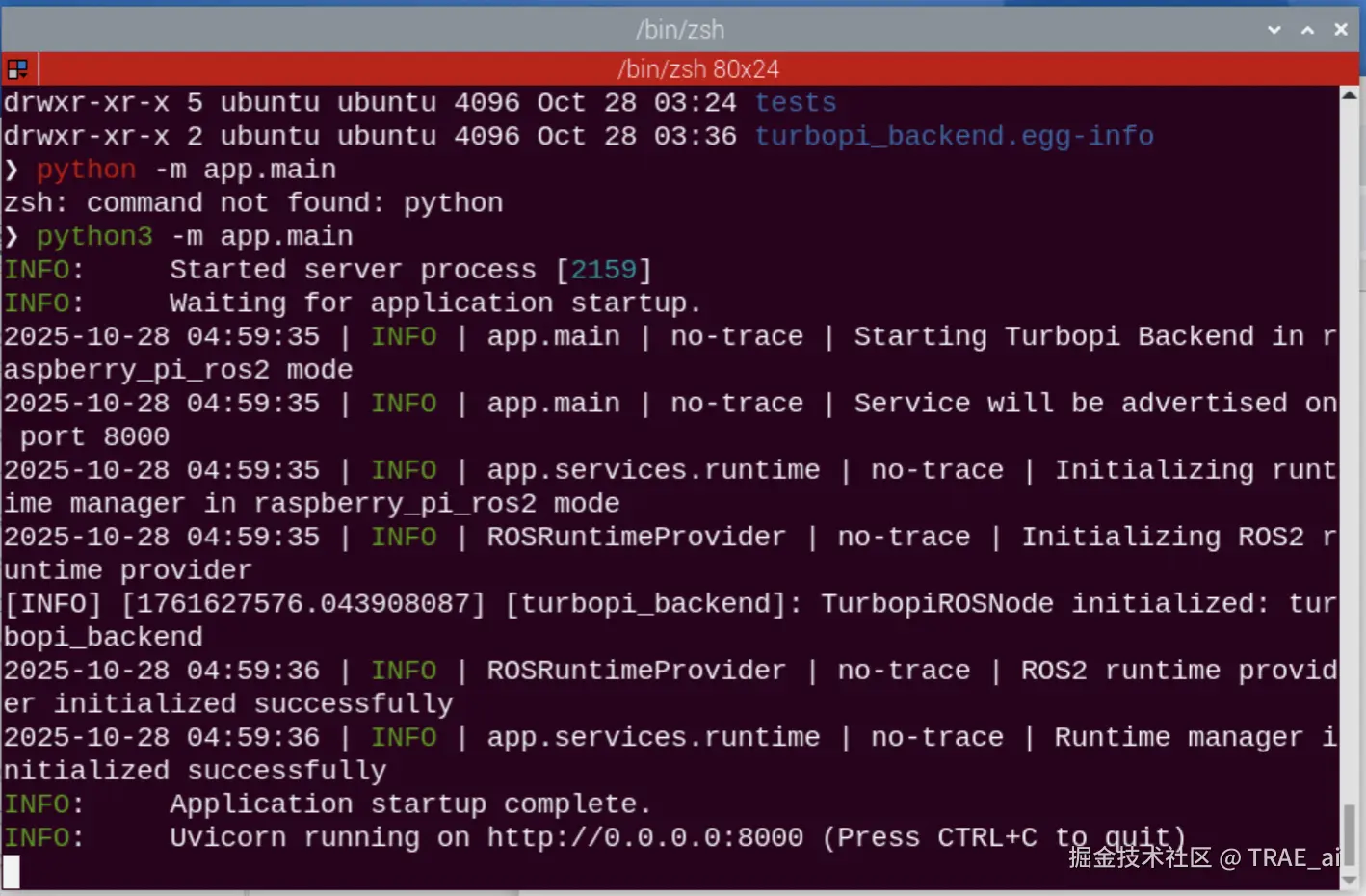
把后端代码拷贝到树莓派小车,然后根据项目 README.md (TRAE 写代码时生成) 安装、启动后端服务。
笔记本上成功找到后台服务。
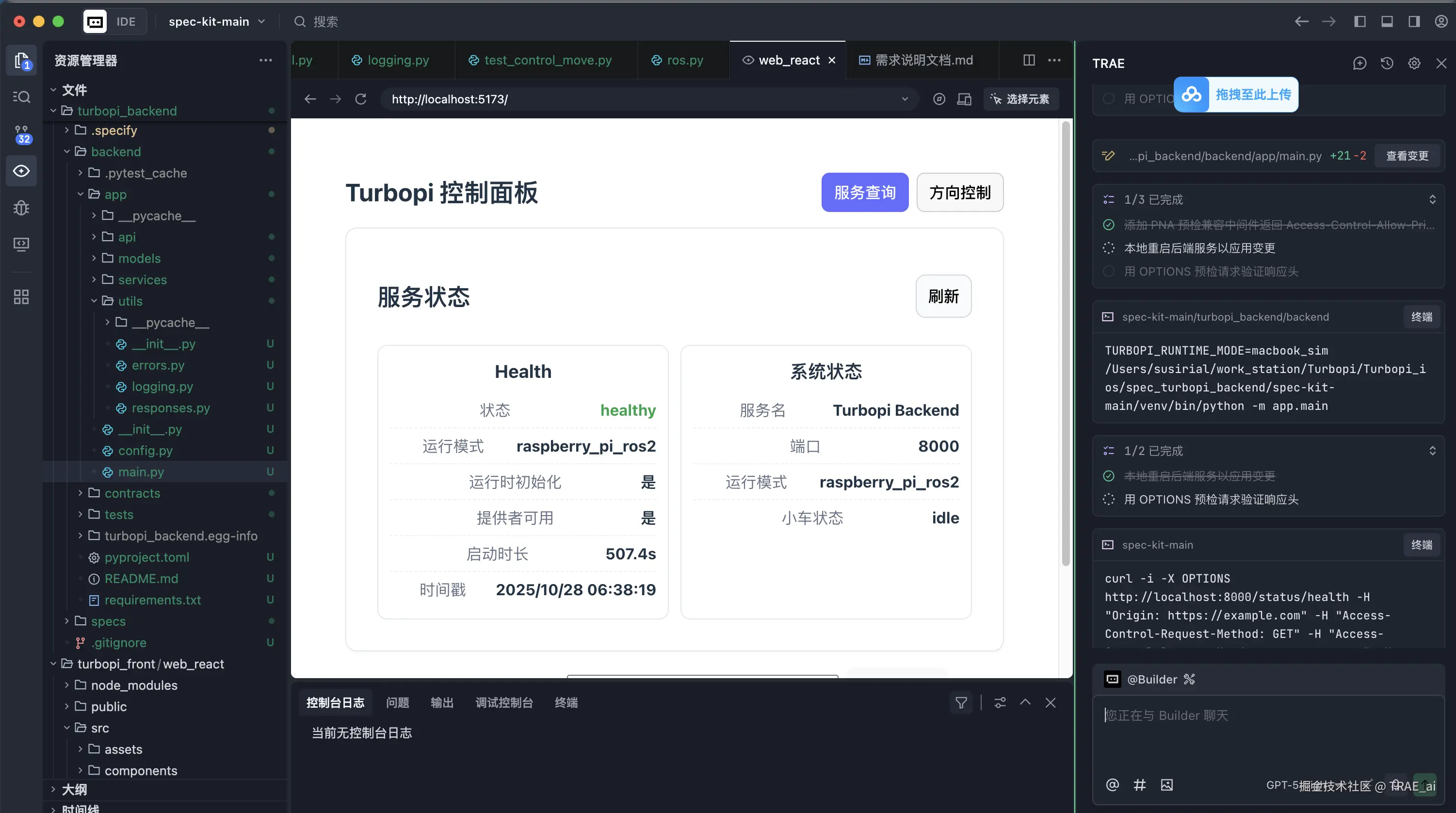
进入方向控制页面测试,一次通过测试(之前把完整的 DEMO 代码给到 TRAE)。

效果演示

总结
本文展示了如何使用 TRAE + Spec-kit 工具链,从需求定义到代码实现,完整构建一个树莓派智能小车控制系统。整个流程遵循规范化开发流程,通过 AI 辅助大幅提升开发效率,同时保证代码质量和系统可维护性。