1.课程介绍
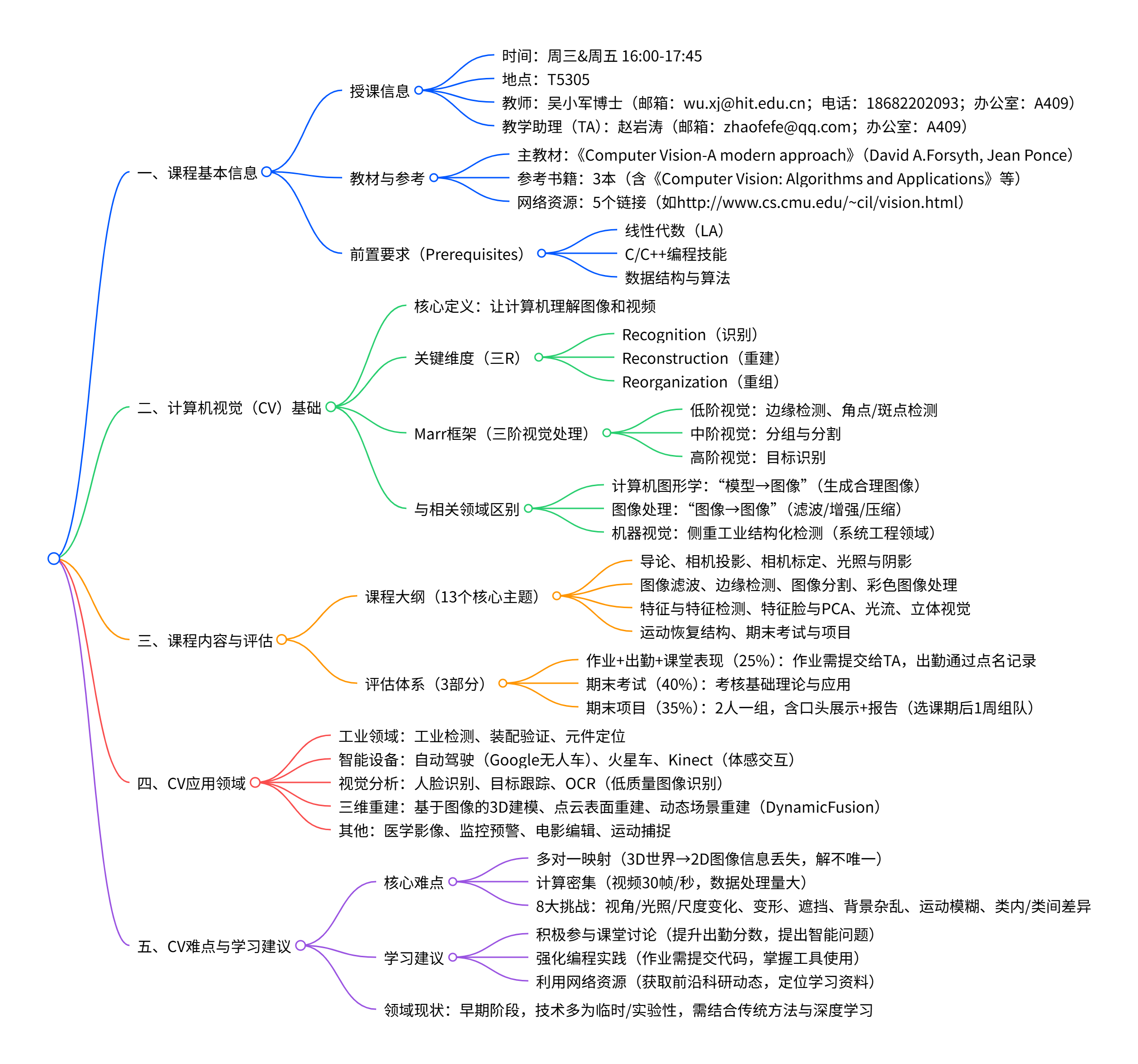
CV的定义是让计算机理解图像和视频 ,核心为"三R(Recognition、Reconstruction、Reorganization)",并通过Marr框架(低阶边缘检测、中阶分组分割、高阶识别)解析CV流程,同时列举了自动驾驶、3D重建、人脸识别等10+类应用场景 ,指出CV存在多对一映射、计算密集及视角/光照变化等8大挑战,强调其仍处于早期阶段,需结合传统方法与深度学习学习。
思维导图
计算机视觉核心定义与理论框架
-
CV的核心定义
- 本质:让计算机理解图像和视频 ,具体解决6类问题:
- 场景识别("这是什么场景?");
- 目标定位("汽车在哪里?");
- 距离测量("建筑物有多远?");
- 行为分析("它们在做什么?");
- 原因推断("为什么会发生?");
- 未来预测("接下来会看到什么?")。
- 本质:让计算机理解图像和视频 ,具体解决6类问题:
-
CV的核心维度------"三R"
- Recognition(识别):识别图像中的目标与场景;
- Reconstruction(重建):从2D图像恢复3D场景结构;
- Reorganization(重组):对图像信息进行结构化整理,支持后续分析。
-
Marr视觉框架(三阶处理流程)
视觉层级 核心任务 具体操作 低阶视觉(Early Vision) 处理局部图像属性 边缘检测、角点检测、斑点检测 中阶视觉(Mid-level Vision) 图像信息分组 目标分割、区域合并 高阶视觉(High-level Vision) 目标理解 目标识别、场景语义分析 -
CV与相关领域的区别
领域名称 核心目标 输入输出关系 学科归属 计算机视觉(CV) 从图像中提取定量/定性信息 图像→信息(如目标类别、距离) 计算机科学 计算机图形学 生成"合理"的图像 模型→图像(如3D模型渲染) 计算机科学 图像处理 图像间的转换优化 图像→图像(如滤波、压缩) 信号处理 机器视觉 工业结构化检测任务 图像→检测结果(如缺陷判断) 系统工程
课程大纲
- 课程核心大纲
- 计算机视觉导论;
- 相机模型与投影原理;
- 相机标定技术;
- 光照与阴影分析;
- 图像滤波算法;
- 边缘检测技术;
- 图像分割方法;
- 彩色图像处理;
- 特征提取与检测;
- 特征脸(Eigenface)与主成分分析(PCA);
- 光流(Optical Flow)估计;
- 立体视觉(Stereo Vision);
- 运动恢复结构(Structure from Motion)
四、CV的应用领域(10+类核心场景)
| 应用类别 | 具体案例 | 技术支撑 |
|---|---|---|
| 工业检测 | 表面缺陷检测(深度学习驱动)、装配验证、元件计数 | 机器视觉算法、图像分割 |
| 智能交通 | 自动驾驶(Google无人车,用LIDAR+相机)、车辆跟踪 | 立体视觉、目标检测、光流 |
| 三维重建 | 基于图像的3D建模(如罗马斗兽场重建)、点云表面重建、动态场景重建(DynamicFusion) | 运动恢复结构、激光扫描 |
| 生物识别 | 人脸识别(Face++、百度等企业应用)、微笑快门相机 | 特征脸、目标跟踪 |
| 智能设备 | Kinect体感交互(Xbox游戏、Skype视频)、火星车导航 | 深度相机、立体视觉 |
| 医学影像 | 病灶检测、器官分割 | 图像分割、特征提取 |
| 内容创作 | 电影特效、运动捕捉(如汤姆·汉克斯数字木偶) | 运动捕捉、变形传输 |
| 文字识别 | 低质量图像OCR(深度学习驱动)、代码读取 | 字符检测、特征匹配 |
CV的难点
- 核心难点(3大本质问题+8大挑战)
- 本质多对一映射------不同3D场景(材质、光照、几何)可能生成相似2D图像,导致解不唯一;
- 本质计算密集------视频数据量达30帧/秒,实时处理需求高;
- 8大具体挑战:视角变化、光照变化、尺度变化、目标变形、遮挡、背景杂乱、运动模糊、类内/类间差异。
关键问题
计算机视觉的核心本质是什么?其"三R"维度分别对应哪些具体任务?这些维度如何支撑CV的核心目标?
- CV的核心本质是让计算机理解图像和视频,即从2D视觉数据中提取3D场景的语义信息,解决"是什么、在哪里、做什么"等问题;
- "三R"维度及具体任务:
- Recognition(识别):对应"目标/场景识别"任务,如判断图像中的目标是汽车还是建筑、场景是街道还是校园;
- Reconstruction(重建):对应"3D结构恢复"任务,如从多张图像重建罗马斗兽场的3D模型、通过深度相机获取动态场景的4D(3D+时间)结构;
- Reorganization(重组):对应"信息结构化"任务,如将图像分割为前景目标与背景、整理目标的轮廓与特征点;
- 支撑逻辑:"三R"形成闭环------Reorganization对图像信息结构化,为Recognition(识别目标)和Reconstruction(重建3D)提供基础,最终共同实现"计算机理解视觉数据"的核心目标。
计算机视觉与图像处理、机器视觉的核心区别是什么?这些区别体现在目标、输入输出关系及学科归属上,对课程学习有何指导意义?
-
三者核心区别如下表:
对比维度 计算机视觉(CV) 图像处理 机器视觉 核心目标 提取定量/定性信息(如目标类别、距离) 优化图像质量/格式(如去噪、压缩) 解决工业结构化检测(如缺陷判断、装配验证) 输入输出 图像→信息 图像→图像 图像→检测结果(如"合格/不合格") 学科归属 计算机科学 信号处理 系统工程
2.相机模型
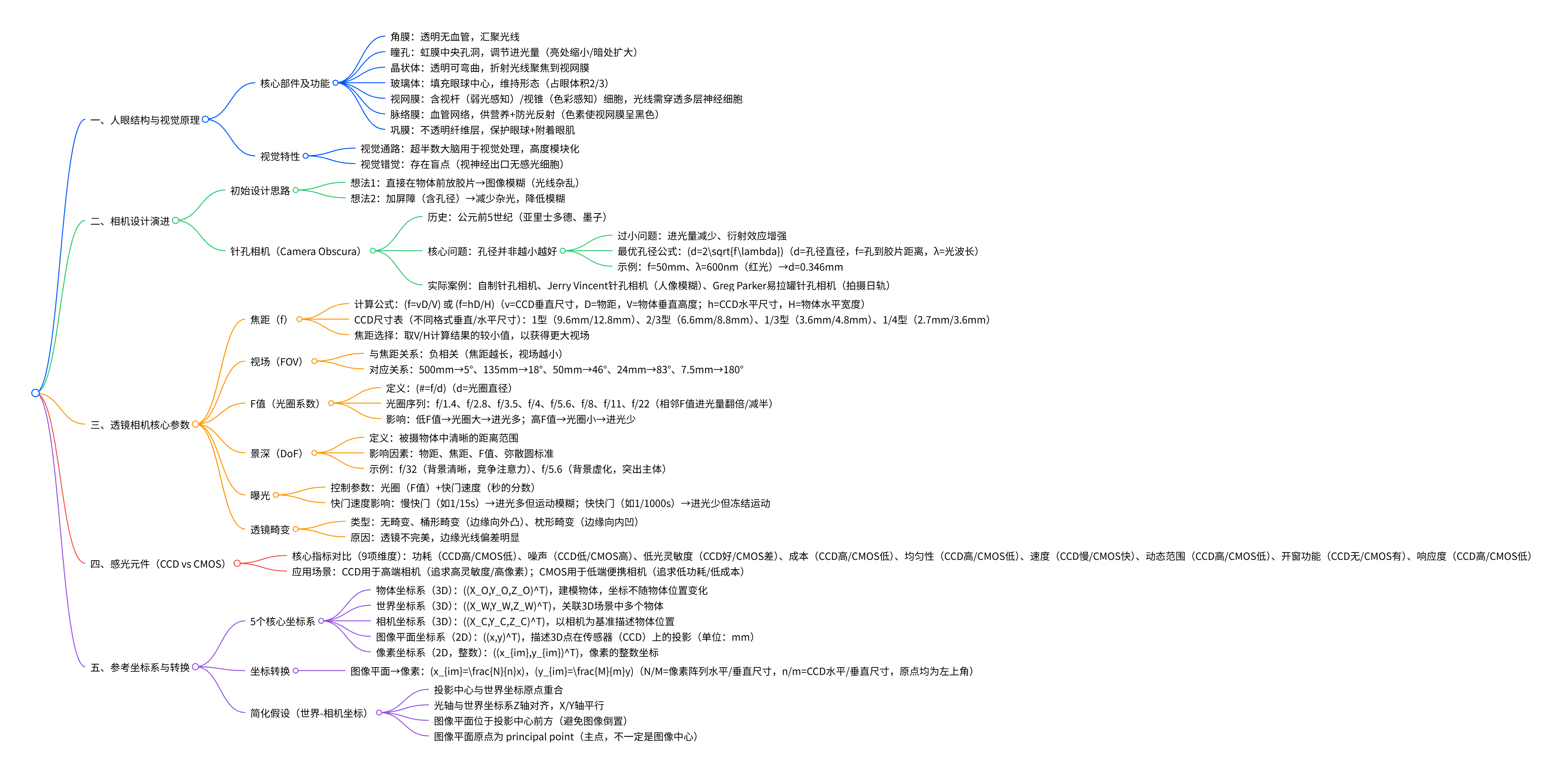
核心围绕"从人眼视觉原理到相机设计与参数"展开:先解析人眼结构 (角膜、瞳孔、晶状体等部件功能及视觉通路)与视觉特性(盲点错觉);再阐述相机设计演进(从"胶片+屏障"到针孔相机 ,给出最优孔径公式d=2fλd=2\sqrt{f\lambda}d=2fλ );随后详解透镜相机核心参数 (焦距计算f=vD/Vf=vD/Vf=vD/V或f=hD/Hf=hD/Hf=hD/H、视场与焦距负相关、F值与光圈的关系、景深影响因素、曝光的"光圈+快门速度"控制、透镜畸变类型);对比CCD与CMOS感光元件 的9项关键指标(如CCD功耗高但低光灵敏度好,CMOS成本低且速度快);最后定义5个参考坐标系(物体、世界、相机、图像平面、像素)及相互转换关系,为3D场景分析提供坐标基础。
思维导图
详细总结
人眼结构与视觉原理(相机设计的生物基础)
-
核心部件及功能
人眼是相机设计的灵感来源,各部件分工明确,共同实现光线感知与成像:
部件名称 核心功能 关键特性 角膜(Cornea) 汇聚入射光线 透明无血管,光线进入眼的第一道"透镜" 瞳孔(Pupil) 调节进光量 虹膜中央孔洞,亮环境缩小(减少强光损伤)、暗环境扩大(增加进光) 晶状体(Lens) 聚焦光线到视网膜 透明可弯曲,通过形状变化调整焦距(如看近物时变凸) 玻璃体(Vitreous) 维持眼球形态 透明粘稠物质,占眼球体积2/3,填充视网膜与晶状体之间的空间 视网膜(Retina) 感光并转换信号 含视杆细胞 (弱光感知,无色彩)和视锥细胞(色彩感知,强光下工作),感光细胞位于视网膜底层,光线需穿透血管、神经纤维等多层结构才能到达 脉络膜(Choroid) 营养供给+防反射 富含血管,为视网膜细胞供能;含色素使视网膜呈黑色,避免眼内光线反射导致成像模糊 巩膜(Sclera) 保护眼球 不透明纤维外层,为眼肌提供附着点,维持眼球结构稳定 -
视觉特性与通路
- 视觉通路:超半数大脑区域参与视觉处理,处理过程高度模块化(从感光细胞→双极细胞→神经节细胞→视神经→大脑视觉皮层);
- 视觉错觉:存在盲点(视神经穿出视网膜的区域无感光细胞,无法感知光线),但大脑会通过周边视觉信息"补全"盲点,使人难以察觉。
相机设计演进(从"模糊"到"针孔成像")
-
初始设计思路的缺陷与改进
- 想法1:直接在物体前方放置胶片→图像严重模糊(原因:物体各点发出的光线杂乱投射到胶片,无定向性);
- 想法2:在胶片与物体间加"带孔径的屏障"→减少杂光,降低模糊(孔径限制了光线投射方向,使物体各点光线大致对应胶片上的固定点),此时"孔径"即相机的雏形光圈。
-
针孔相机(Camera Obscura)的核心原理与局限
- 历史起源:公元前5世纪,亚里士多德与中国墨子分别记录了"针孔成像"现象,是最早的相机原型;
- 成像特点:通过极小孔径(针孔)使光线定向投射到胶片,形成倒立实像;
- 关键问题:孔径并非越小越好
- 过小缺陷:①进光量急剧减少,需长时间曝光;②衍射效应增强(光线绕过小孔边缘发生弯曲),导致图像模糊;
- 最优孔径公式:d=2fλ\boldsymbol{d=2\sqrt{f\lambda}}d=2fλ (ddd为孔径直径,fff为针孔到胶片的距离,λ\lambdaλ为入射光波长);
- 示例计算:若f=50mmf=50mmf=50mm(针孔到胶片距离)、λ=600nm\lambda=600nmλ=600nm(红光波长,1nm=10−6mm1nm=10^{-6}mm1nm=10−6mm),则d=250×600×10−6≈0.346mmd=2\sqrt{50\times600\times10^{-6}}≈0.346mmd=250×600×10−6 ≈0.346mm,此孔径下成像最清晰;
- 实际案例:Jerry Vincent的针孔相机拍摄人像(因曝光时间长,人物移动导致"鬼影"效果)、南安普顿大学Greg Parker的易拉罐针孔相机(拍摄夏至/冬至日轨,记录太阳运动轨迹)。
透镜相机核心参数(决定成像质量的关键)
透镜相机通过"透镜"替代针孔,解决了针孔相机进光量少、衍射模糊的问题,其核心参数直接影响成像效果:
-
焦距(f):决定"拍摄范围"的基础
-
定义:透镜中心到成像平面(CCD)的距离,是衡量透镜"聚光能力"的指标;
-
计算公式:基于物体尺寸、物距与CCD尺寸推导,有两个核心公式:
f=v×D/V\boldsymbol{f=v\times D/V}f=v×D/V
(垂直方向:vvv为CCD垂直尺寸,DDD为物体到透镜的距离,VVV为物体垂直高度)
f=h×D/H\boldsymbol{f=h\times D/H}f=h×D/H
(水平方向:hhh为CCD水平尺寸,HHH为物体水平宽度); -
CCD尺寸标准(不同格式的传感器尺寸,单位:mm):
CCD格式 垂直尺寸(v) 水平尺寸(h) 1型 9.6 12.8 2/3型 6.6 8.8 1/3型 3.6 4.8 1/4型 2.7 3.6 -
焦距选择原则:若垂直/水平方向计算的焦距值不同,取较小值(可获得更大的视场,拍摄范围更广)。
-
-
视场(FOV):与焦距负相关的"拍摄角度"
- 定义:相机能拍摄到的空间范围(以角度衡量),直接决定"一张照片能装下多少景物";
- 与焦距的关系:焦距越长,视场越小(长焦镜头拍远处小范围,广角镜头拍近处大范围);
- 典型对应关系(焦距→视场):
500mm→5°、135mm→18°、50mm→46°、24mm→83°、7.5mm→180°(鱼眼镜头)。
-
F值(光圈系数):控制"进光量"的核心
- 定义:衡量光圈大小的指标,公式为#=f/d\boldsymbol{\#=f/d}#=f/d(ddd为光圈直径);
- 光圈序列:常用F值从大到小为f/22、f/11、f/8、f/5.6、f/4、f/3.5、f/2.8、f/1.4,相邻F值的进光量相差1倍(如从f/2.8到f/4,进光量减半);
- 核心影响:低F值(如f/1.4)→光圈大→进光多(适合暗环境);高F值(如f/22)→光圈小→进光少(适合亮环境)。
-
景深(DoF):决定"清晰范围"的关键
- 定义:被摄物体中"成像清晰的距离范围",超出该范围的景物会虚化;
- 影响因素:①物距(物体越远,景深越大);②焦距(焦距越长,景深越小);③F值(F值越高,景深越大);④弥散圆标准(传感器尺寸越小,弥散圆阈值越小,景深越大);
- 示例对比:
- f/32(高F值):景深大,背景与主体均清晰,易导致背景"争夺视觉注意力";
- f/5.6(中F值):景深小,背景虚化,主体(如花朵)更突出。
-
曝光:控制"成像亮度"的平衡
- 定义:CCD传感器接收的光量总和,直接决定照片"过亮"(过曝)或"过暗"(欠曝);
- 控制参数:由"光圈(F值)"和"快门速度"共同决定:
- 快门速度:光线照射CCD的时间(单位:秒的分数,如1/15s、1/60s、1/250s、1/1000s);
- 速度影响:慢快门(1/15s)→进光多,但易产生运动模糊 (适合拍流水、夜景);快快门(1/1000s)→进光少,但能冻结运动(适合拍运动的动物、运动员)。
-
透镜畸变:透镜不完美导致的"成像偏差"
- 类型:①无畸变(理想透镜,仅理论存在);②桶形畸变(图像边缘向外凸起,常见于广角镜头);③枕形畸变(图像边缘向内凹陷,常见于长焦镜头);
- 原因:透镜镜片曲率加工不完美,边缘光线的折射角度与中心光线偏差过大,导致成像变形。
感光元件:CCD与CMOS的差异与应用
感光元件是相机的"视网膜",负责将光信号转换为电信号,主流类型为CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体),二者在性能与应用上差异显著:
| 对比维度 | CCD(电荷耦合器件) | CMOS(互补金属氧化物半导体) |
|---|---|---|
| 功耗(Power Consumption) | 高 | 低 |
| 噪声(Noise) | 低(成像更纯净) | 高(易产生杂色噪点) |
| 低光灵敏度(Low light Sensitivity) | 好(暗环境成像清晰) | 差(暗环境易欠曝、噪点多) |
| 成本(Cost) | 高 | 低 |
| 均匀性(Uniformity) | 高(画面亮度一致) | 低(边缘易偏暗) |
| 速度(Speed) | 慢(信号传输慢) | 快(每个像素独立处理信号) |
| 动态范围(Dynamic Range) | 高(明暗细节保留多) | 低(明暗对比强烈时易丢失细节) |
| 开窗功能(Windowing) | 不能(需读取全画面) | 能(仅读取指定区域,提速) |
| 响应度(Responsivity) | 高(光信号转换效率高) | 低(转换效率低) |
- 应用场景 :
- CCD:用于高端相机(如专业单反、工业检测相机),追求高成像质量、低噪声、高灵敏度;
- CMOS:用于低端便携相机(如手机相机、入门级卡片机),优先考虑低功耗(延长续航)、低成本(降低售价)。
参考坐标系与转换(3D场景分析的基础)
为实现"3D场景→2D图像"的精准映射,需定义5个参考坐标系,并明确其转换关系,支撑后续相机标定、立体视觉等技术:
-
5个核心坐标系的定义
坐标系名称 维度 符号表示 核心用途 关键特性 物体坐标系 3D (XO,YO,ZO)T(X_O,Y_O,Z_O)^T(XO,YO,ZO)T 建模单个物体(如检测零件孔位相对位置) 坐标不随物体在场景中的位置变化 世界坐标系 3D (XW,YW,ZW)T(X_W,Y_W,Z_W)^T(XW,YW,ZW)T 关联3D场景中多个物体(如定位"车"与"路") 全局基准坐标系,固定不变 相机坐标系 3D (XC,YC,ZC)T(X_C,Y_C,Z_C)^T(XC,YC,ZC)T 以相机为基准描述物体位置 原点为相机投影中心,光轴为Z轴 图像平面坐标系 2D (x,y)T(x,y)^T(x,y)T 描述3D点在CCD上的投影位置 单位为mm(物理尺寸),原点为主点 像素坐标系 2D (xim,yim)T(x_{im},y_{im})^T(xim,yim)T 描述像素在图像阵列中的位置 单位为"像素"(整数),原点为图像左上角 -
关键坐标转换关系
- 图像平面坐标系→像素坐标系(物理尺寸→像素尺寸):
因CCD的物理尺寸(如n mm×m mm)与像素阵列尺寸(如N像素×M像素)不同,转换公式为:
xim=Nnx\boldsymbol{x_{im}=\frac{N}{n}x}xim=nNx
yim=Mmy\boldsymbol{y_{im}=\frac{M}{m}y}yim=mMy
(NNN为像素阵列水平尺寸,nnn为CCD水平物理尺寸;MMM为像素阵列垂直尺寸,mmm为CCD垂直物理尺寸,原点均为左上角)。
- 图像平面坐标系→像素坐标系(物理尺寸→像素尺寸):
-
世界坐标系与相机坐标系的简化假设
为简化3D→2D投影的数学计算,通常做以下假设:
- 相机投影中心与世界坐标系原点重合;
- 相机光轴与世界坐标系Z轴对齐,X/Y轴分别与世界坐标系X/Y轴平行;
- 图像平面位于投影中心前方(避免传统针孔相机的"倒立图像",简化后续处理);
- 图像平面原点为主点(principal point) ------光轴与图像平面的交点,注意:主点不一定是图像的几何中心(受透镜安装偏差影响)。
关键问题
针孔相机的"最优孔径"是如何确定的?请结合公式与示例说明其原理,以及孔径过小会导致什么问题?
针孔相机的最优孔径由"进光量"与"衍射模糊"的平衡决定,核心是通过公式计算使成像最清晰:
-
最优孔径公式 :d=2fλ\boldsymbol{d=2\sqrt{f\lambda}}d=2fλ ,其中ddd为孔径直径(mm),fff为针孔到胶片的距离(mm),λ\lambdaλ为入射光的波长(mm,如红光λ=600nm=600×10−6mm\lambda=600nm=600\times10^{-6}mmλ=600nm=600×10−6mm);
-
示例计算 :若针孔到胶片距离f=50mmf=50mmf=50mm,红光波长λ=600nm\lambda=600nmλ=600nm,代入公式得:
d=250×600×10−6=20.03=2×0.173≈0.346mmd=2\sqrt{50\times600\times10^{-6}}=2\sqrt{0.03}=2\times0.173≈0.346mmd=250×600×10−6 =20.03 =2×0.173≈0.346mm即孔径直径为0.346mm时成像最清晰;
-
孔径过小的问题:
①进光量不足------光线仅能通过极小孔洞,需延长曝光时间(如拍摄动态物体时易产生模糊);
②衍射效应增强------光线绕过小孔边缘发生弯曲,导致物体各点的投影光斑扩大,图像整体模糊。
透镜相机的"焦距""视场""F值"三者之间存在怎样的关联?这些关联对实际拍摄(如人像、风景)有何指导意义?
三者的核心关联的是"焦距为基础,视场与焦距负相关,F值通过光圈间接影响成像范围的清晰度",具体关联及拍摄指导如下:
- 焦距与视场的关联 :焦距越长,视场越小 (焦距决定"镜头能'看'多远",视场决定"镜头能'看'多广");
- 典型对应:500mm长焦→5°视场(仅拍远处小物体,如月亮);24mm广角→83°视场(拍大范围场景,如风景);50mm标准焦→46°视场(接近人眼视角,拍日常场景);
- 焦距与F值的关联 :F值由"焦距/光圈直径"(#=f/d\#=f/d#=f/d)决定,相同光圈直径下,焦距越长,F值越高(进光量越少);
- 对实际拍摄的指导 :
- 人像拍摄:选50-85mm中长焦(视场适中,压缩背景空间感)+低F值(如f/1.8-f/4,背景虚化突出人物);
- 风景拍摄:选16-24mm广角(大视场容纳更多景物)+高F值(如f/8-f/16,大景深确保远近景物均清晰);
- 夜景拍摄:选24-50mm标准焦(平衡视场与手抖影响)+低F值(如f/2.8-f/5.6,增加进光量,减少噪点)。
CCD与CMOS作为两种主流感光元件,在"低光灵敏度""功耗""成本"三个关键维度上有何差异?这些差异如何决定它们的应用场景?
CCD与CMOS在三个维度的差异显著,直接决定了其适用的相机类型:
-
核心差异对比 :
维度 CCD CMOS 低光灵敏度 好(暗环境下感光能力强,成像清晰、噪点少) 差(暗环境下易欠曝,噪点多、细节丢失) 功耗 高(信号需逐行传输,耗电多) 低(每个像素独立处理信号,耗电少) 成本 高(制造工艺复杂,量产难度大) 低(工艺简单,可与其他电路集成) -
应用场景决定 :
- CCD的应用:高端相机(如专业单反相机、工业检测相机、天文相机)------这类场景优先追求"成像质量"(低光清晰、低噪点),对功耗和成本敏感度低;例如工业检测中,需在暗箱内拍摄零件缺陷,CCD的低光灵敏度可确保缺陷细节不丢失;
- CMOS的应用:低端便携设备(如手机相机、入门级卡片机、监控摄像头)------这类场景优先考虑"续航"(低功耗延长使用时间)和"售价"(低成本降低用户购买门槛),对成像质量要求适中;例如手机相机需集成在狭小空间内,CMOS的低功耗和小体积优势显著,同时满足日常拍照需求。
3.相机参数与投影原理
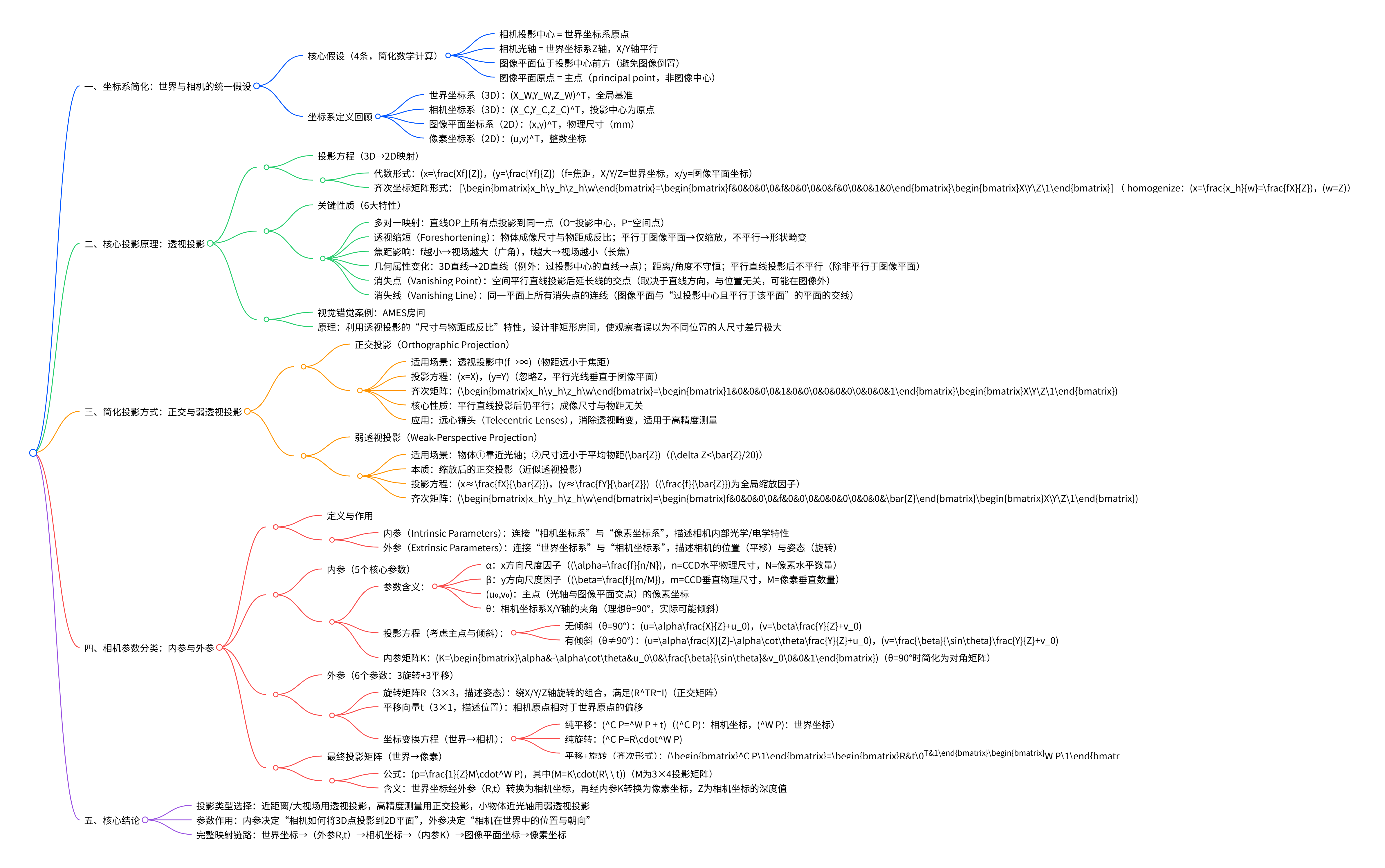
核心围绕"3D场景到2D像素的映射过程"展开:先通过4个简化假设(投影中心与世界原点重合、光轴对齐世界Z轴等)统一世界与相机坐标系;随后详解透视投影 的代数/矩阵(齐次坐标)方程及关键性质(多对一映射、透视缩短、消失点/消失线,附AMES房间视觉错觉案例);对比两种简化投影(正交投影 :焦距→∞,平行线条投影后仍平行,适用于远心镜头测量;弱透视投影 :近似透视,适用于物体近光轴且尺寸远小于物距);最终明确相机参数分类------内参 (连接相机与像素坐标系,含尺度因子α/β、主点u₀/v₀、轴夹角θ)与外参(定义相机相对世界的姿态,含旋转矩阵R、平移向量t),并推导内参投影矩阵与外参坐标变换(平移+旋转)的组合形式,最终形成"世界坐标→相机坐标(外参)→图像平面(内参)→像素坐标"的完整映射链路。
思维导图
详细总结
坐标系简化:世界与相机的统一基础
为降低"3D世界→2D图像"映射的数学复杂度,文档提出4条核心简化假设,将世界坐标系与相机坐标系对齐,为后续投影方程推导奠定基础:
- 投影中心重合:相机的投影中心(透镜中心)与世界坐标系的原点重合;
- 光轴对齐:相机的光轴(垂直于图像平面的直线)与世界坐标系的Z轴完全一致,且相机坐标系的X/Y轴分别与世界坐标系的X/Y轴平行;
- 图像平面前置 :将图像平面(CCD/CMOS所在平面)置于投影中心前方(而非传统针孔相机的后方),避免成像倒置,简化后续处理;
- 主点为原点 :图像平面的坐标原点定义为"主点"(光轴与图像平面的交点),需注意:主点不一定是图像的几何中心(受透镜安装偏差影响)。
此阶段需明确4个关键坐标系的角色:世界坐标系(全局基准)、相机坐标系(3D投影起点)、图像平面坐标系(物理尺寸,mm)、像素坐标系(整数坐标,用于显示),后续所有投影与参数均围绕这4个坐标系的转换展开。
核心投影原理:透视投影(Perspective Projection)
透视投影是最贴近人眼与相机成像的模型,文档从方程推导、核心性质、视觉案例三方面展开,是本章重点内容。
1. 投影方程(3D→2D的数学映射)
基于坐标系简化假设,空间中任意一点P(X,Y,Z)P(X,Y,Z)P(X,Y,Z)(世界坐标,因坐标系对齐,等同于相机坐标)在图像平面上的投影点p(x,y)p(x,y)p(x,y)满足:
- 代数形式 :通过相似三角形推导(△OAB∽△OA'B',O为投影中心,AB为物体尺寸,A'B'为投影尺寸),得到:
x=XfZ,y=YfZ\boldsymbol{x=\frac{Xf}{Z}},\quad\boldsymbol{y=\frac{Yf}{Z}}x=ZXf,y=ZYf
其中,fff为焦距(投影中心到图像平面的距离),ZZZ为点PPP到投影中心的深度(沿光轴方向)。 - 齐次坐标矩阵形式 :为统一处理"无穷远点"(如消失点),引入齐次坐标(4维),投影矩阵为:
xhyhzhw=f0000f0000f00010XYZ1\begin{bmatrix}x_h\\y_h\\z_h\\w\end{bmatrix}=\begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&f&0\\0&0&1&0\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix} xhyhzhw = f0000f0000f10000 XYZ1
齐次坐标转换为非齐次坐标时,需除以w=Zw=Zw=Z,还原为代数形式:x=xhw=fXZx=\frac{x_h}{w}=\frac{fX}{Z}x=wxh=ZfX,y=yhw=fYZy=\frac{y_h}{w}=\frac{fY}{Z}y=wyh=ZfY。
2. 透视投影的6大核心性质
透视投影的特性直接决定了成像效果,也是计算机视觉中"3D重建、相机标定"的关键依据:
- 性质1:多对一映射
空间中所有位于"过投影中心的直线OP"上的点,投影到图像平面后均为同一点ppp(深度信息Z丢失,导致3D→2D的信息损失)。 - 性质2:透视缩短(Foreshortening)
物体的成像尺寸与"物体到相机的距离Z"成反比:距离越远,成像越小;若物体表面不平行于图像平面,会产生"形状畸变"(如倾斜的桌面投影后呈梯形);若平行于图像平面,则仅发生"缩放"(无畸变)。 - 性质3:焦距对於视场的影响
焦距fff与视场(FOV)呈负相关 :- fff越小(广角镜头):视场越大,能拍摄更多场景,但透视畸变越明显;
- fff越大(长焦镜头):视场越小,仅能拍摄局部场景,但透视畸变越弱(近似"望远镜"效果)。
- 性质4:几何属性不守恒
- 3D空间中的直线投影后仍为2D直线(例外:过投影中心的直线投影为点);
- 距离、角度不守恒(如正方形投影后可能为梯形,直角投影后可能为锐角/钝角);
- 平行直线投影后不平行(除非直线平行于图像平面),而是汇聚于"消失点"。
- 性质5:消失点(Vanishing Point)
空间中平行的直线 ,其透视投影的延长线会交于图像平面上的同一点,该点称为"消失点"。- 关键特性:消失点仅与直线的方向有关,与直线的位置无关;若直线方向平行于光轴,消失点会落在图像平面外(无穷远处)。
- 性质6:消失线(Vanishing Line)
空间中同一平面上的所有直线 ,其消失点会构成一条直线,称为"消失线"。- 几何意义:消失线是"过投影中心且平行于该平面"的平面,与图像平面的交线;例如,地面的消失线对应"地平线"。
3. 视觉错觉案例:AMES房间
通过"AMES房间"案例直观展示透视投影的特性:该房间实际为非矩形(墙面、地面均为梯形),但从特定角度观察时,其透视投影与"矩形房间"完全一致,导致观察者误以为房间内不同位置的人"尺寸差异极大"(近处人显小、远处人显大),本质是利用了"透视缩短"与"消失点"的视觉原理。
简化投影方式:正交与弱透视投影
透视投影的数学复杂度较高,在特定场景下可采用正交投影 或弱透视投影简化,文档详细对比了两种模型的适用场景、方程与性质。
1. 正交投影(Orthographic Projection)
-
适用场景 :当物体到相机的距离远大于物体尺寸(即焦距f→∞f→∞f→∞),此时透视效应可忽略,如卫星遥感、高精度测量。
-
核心假设 :投影光线为平行光,且垂直于图像平面。
-
投影方程 :忽略深度Z的影响,直接映射:
x=X,y=Y\boldsymbol{x=X},\quad\boldsymbol{y=Y}x=X,y=Y齐次矩阵形式:xhyhzhw=1000010000000001XYZ1\begin{bmatrix}x_h\\y_h\\z_h\\w\end{bmatrix}=\begin{bmatrix}1&0&0&0\\0&1&0&0\\0&0&0&0\\0&0&0&1\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix} xhyhzhw = 1000010000000001 XYZ1
( homogenize后x=X,y=Yx=X,y=Yx=X,y=Y)。
-
关键性质:
- 空间中平行的直线,投影后仍平行;
- 物体成像尺寸与"物距"无关(无透视缩短);
- 无深度信息丢失(但实际应用中仍需额外手段获取Z)。
-
典型应用 :远心镜头(Telecentric Lenses) ------通过在透镜焦点处放置小孔,确保投影光线平行,消除透视畸变,适用于工业零件尺寸测量(如螺丝直径、芯片引脚间距)。
2. 弱透视投影(Weak-Perspective Projection)
- 适用场景 :物体①靠近相机光轴;②尺寸远小于其到相机的平均距离Zˉ\bar{Z}Zˉ(通常要求δZ<Zˉ/20\delta Z<\bar{Z}/20δZ<Zˉ/20),如小物体(昆虫、零件)的成像。
- 本质 :近似的透视投影,用"缩放后的正交投影"替代,平衡精度与计算复杂度。
- 投影方程 :将深度Z近似为平均距离Zˉ\bar{Z}Zˉ,引入全局缩放因子fZˉ\frac{f}{\bar{Z}}Zˉf:
x≈fXZˉ,y≈fYZˉ\boldsymbol{x≈\frac{fX}{\bar{Z}}},\quad\boldsymbol{y≈\frac{fY}{\bar{Z}}}x≈ZˉfX,y≈ZˉfY
齐次矩阵形式:xhyhzhw=f0000f000000000ZˉXYZ1\begin{bmatrix}x_h\\y_h\\z_h\\w\end{bmatrix}=\begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&0&0\\0&0&0&\bar{Z}\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix} xhyhzhw = f0000f000000000Zˉ XYZ1 ( homogenize后x=fXZˉ,y=fYZˉx=\frac{fX}{\bar{Z}},y=\frac{fY}{\bar{Z}}x=ZˉfX,y=ZˉfY)。 - 关键性质:精度低于透视投影,但计算量远小于透视投影,是计算机视觉中"小物体识别"(如细胞检测)的常用模型。
四、相机参数分类:内参与外参(3D→2D的关键桥梁)
相机参数是"世界坐标→像素坐标"映射的核心,文档将其分为内参 (相机内部特性)与外参(相机外部姿态),明确了各参数的定义、方程与矩阵形式。
1. 内参(Intrinsic Parameters):相机的"内在属性"
内参描述相机自身的光学与电学特性,连接"相机坐标系"与"像素坐标系",共5个核心参数,决定了3D点如何在图像平面上形成像素。
| 内参符号 | 参数名称 | 物理含义 |
|---|---|---|
| α | x方向尺度因子 | 焦距f除以"像素水平物理尺寸"(α=fn/N\alpha=\frac{f}{n/N}α=n/Nf,n=CCD水平尺寸,N=水平像素数) |
| β | y方向尺度因子 | 焦距f除以"像素垂直物理尺寸"(β=fm/M\beta=\frac{f}{m/M}β=m/Mf,m=CCD垂直尺寸,M=垂直像素数) |
| (u₀,v₀) | 主点的像素坐标 | 光轴与图像平面交点的像素位置(理想为图像中心,实际因安装偏差可能偏移) |
| θ | 相机X/Y轴的夹角 | 理想情况下θ=90°(正交),实际镜头制造误差可能导致θ≠90°(倾斜) |
-
投影方程(内参作用过程) :
相机坐标系中的点P(X,Y,Z)P(X,Y,Z)P(X,Y,Z),经内参转换为像素坐标(u,v)(u,v)(u,v):
- 无倾斜(θ=90°,理想情况):
u=α⋅XZ+u0,v=β⋅YZ+v0u=\alpha\cdot\frac{X}{Z}+u_0,\quad v=\beta\cdot\frac{Y}{Z}+v_0u=α⋅ZX+u0,v=β⋅ZY+v0
(XZ\frac{X}{Z}ZX、YZ\frac{Y}{Z}ZY为归一化图像坐标,乘以尺度因子α/β转换为像素,再叠加主点偏移(u₀,v₀)) - 有倾斜(θ≠90°,实际情况):
u=α⋅XZ−αcotθ⋅YZ+u0,v=βsinθ⋅YZ+v0u=\alpha\cdot\frac{X}{Z}-\alpha\cot\theta\cdot\frac{Y}{Z}+u_0,\quad v=\frac{\beta}{\sin\theta}\cdot\frac{Y}{Z}+v_0u=α⋅ZX−αcotθ⋅ZY+u0,v=sinθβ⋅ZY+v0
(额外引入−αcotθ⋅YZ-\alpha\cot\theta\cdot\frac{Y}{Z}−αcotθ⋅ZY项补偿X/Y轴倾斜的影响)
- 无倾斜(θ=90°,理想情况):
-
内参矩阵K :将上述方程整理为矩阵形式,便于计算:
K=α−αcotθu00βsinθv0001K=\begin{bmatrix}\alpha&-\alpha\cot\theta&u_0\\0&\frac{\beta}{\sin\theta}&v_0\\0&0&1\end{bmatrix}K= α00−αcotθsinθβ0u0v01当θ=90°时,cotθ=0\cot\theta=0cotθ=0、sinθ=1\sin\theta=1sinθ=1,矩阵简化为:
K=α0u00βv0001K=\begin{bmatrix}\alpha&0&u_0\\0&\beta&v_0\\0&0&1\end{bmatrix}K= α000β0u0v01(对角矩阵,理想内参)
2. 外参(Extrinsic Parameters):相机的"外在姿态"
外参描述相机在世界坐标系中的位置 与姿态 ,连接"世界坐标系"与"相机坐标系",共6个参数(3个旋转+3个平移)。
| 外参类型 | 符号 | 维度 | 核心作用 | 关键特性 |
|---|---|---|---|---|
| 旋转矩阵 | R | 3×3 | 描述相机姿态(绕X/Y/Z轴旋转) | 正交矩阵,满足RTR=IR^TR=IRTR=I(转置等于逆),行列式为1(右手坐标系) |
| 平移向量 | t | 3×1 | 描述相机位置(相对世界原点) | 向量分量(tx,ty,tz)(t_x,t_y,t_z)(tx,ty,tz)分别为相机原点在世界X/Y/Z轴上的偏移量 |
- 坐标变换方程(外参作用过程) :
世界坐标系中的点WP(XW,YW,ZW)^W P(X_W,Y_W,Z_W)WP(XW,YW,ZW),经外参转换为相机坐标系中的点CP(XC,YC,ZC)^C P(X_C,Y_C,Z_C)CP(XC,YC,ZC):- 纯平移(仅位置变化,姿态不变):
CP=WP+t^C P=^W P + tCP=WP+t
(相机原点相对于世界原点偏移t,所有点的坐标均叠加t) - 纯旋转(仅姿态变化,位置不变):
CP=R⋅WP^C P=R\cdot^W PCP=R⋅WP
(绕X/Y/Z轴旋转的组合,如先绕X轴转α角,再绕Y轴转β角,最后绕Z轴转γ角) - 平移+旋转(完整变换,齐次形式):
为统一处理平移与旋转,引入齐次坐标(4维),变换矩阵为"旋转矩阵+平移向量"的组合:CP1\]=\[Rt0T1\]\[WP1\]\\begin{bmatrix}\^C P\\\\1\\end{bmatrix}=\\begin{bmatrix}R\&t\\\\0\^T\&1\\end{bmatrix}\\begin{bmatrix}\^W P\\\\1\\end{bmatrix}\[CP1\]=\[R0Tt1\]\[WP1
(0T=(0,0,0)0^T=(0,0,0)0T=(0,0,0),右下角1为齐次坐标的缩放因子)
- 纯平移(仅位置变化,姿态不变):
3. 最终投影矩阵(世界→像素的完整链路)
结合内参与外参,可推导从"世界坐标"到"像素坐标"的完整映射矩阵------投影矩阵M:
-
核心公式 :p=1ZM⋅WPp=\frac{1}{Z}M\cdot^W Pp=Z1M⋅WP
其中:
- p=(u,v,1)Tp=(u,v,1)^Tp=(u,v,1)T:像素的齐次坐标;
- M=K⋅(R t)M=K\cdot(R\ \ t)M=K⋅(R t):3×4投影矩阵(K为3×3内参矩阵,(R t)为3×4外参矩阵);
- ZZZ:相机坐标系中的深度值(由Z=m3⋅WPZ=m_3\cdot^W PZ=m3⋅WP计算,m3m_3m3为M的第3行);
- 1Z\frac{1}{Z}Z1:齐次坐标的归一化因子,消除深度对投影的影响。
-
物理意义 :
世界坐标→(外参R,t)→相机坐标→(内参K)→归一化图像坐标→(除以Z)→像素坐标,形成"3D→2D"的完整闭环,是后续"相机标定"(求解内参K与外参R,t)的理论基础。
核心结论与应用价值
-
投影模型的选择依据:
- 透视投影:适用于近距离、大视场场景(如手机拍照、自动驾驶),需完整考虑透视效应;
- 正交投影:适用于远距离、高精度测量(如卫星地图、工业检测),需消除透视畸变;
- 弱透视投影:适用于小物体、近光轴场景(如显微成像、零件识别),平衡精度与计算量。
-
参数的核心作用:
- 内参K:决定相机"如何成像"(如焦距、主点位置),需通过相机标定实验求解;
- 外参(R,t):决定相机"在哪里成像"(如在世界中的位置与朝向),需结合场景特征(如棋盘格)估计;
- 投影矩阵M:整合内参与外参,是"3D重建""目标定位"等任务的核心输入(如通过M反推空间点的3D坐标)。
-
后续学习关联 :
本章内容是"相机标定""立体视觉""运动恢复结构(SfM)"的前置基础------相机标定的目标是求解K、R、t;立体视觉需利用两台相机的内参与外参计算深度;SfM需通过多帧图像的投影矩阵恢复场景3D结构。
4.单应性
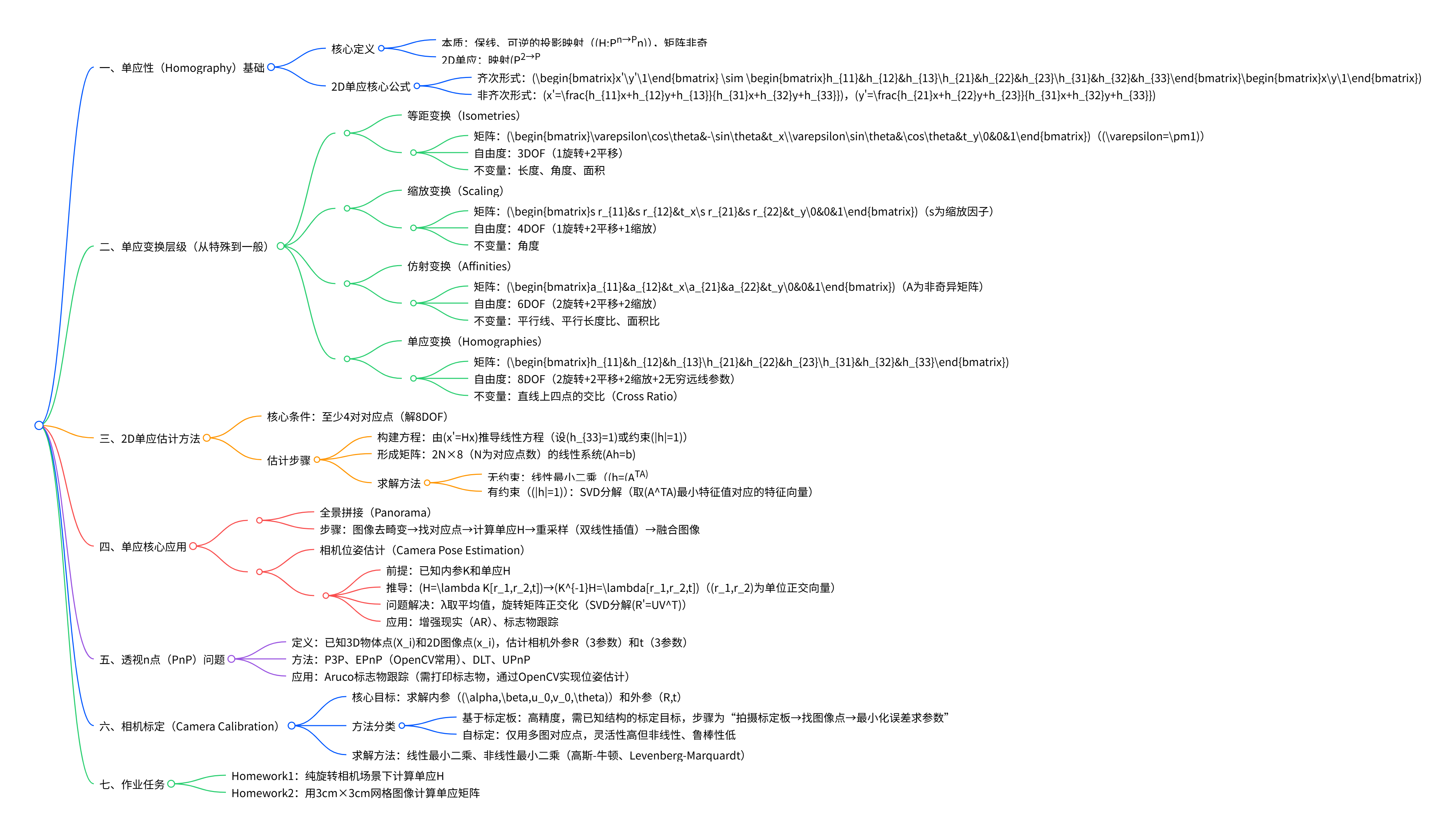
核心围绕2D单应性变换 展开:先明确单应性是保线、可逆的投影映射 ,2D单应由3×3非奇异矩阵 表示(含8个自由度 );随后梳理单应变换层级(从低到高为等距变换3DOF、缩放变换4DOF、仿射变换6DOF、单应变换8DOF);详解单应估计方法------需至少4对对应点 ,通过构建线性方程(如x′=h11x+h12y+h13h31x+h32y+h33x'=\frac{h_{11}x+h_{12}y+h_{13}}{h_{31}x+h_{32}y+h_{33}}x′=h31x+h32y+h33h11x+h12y+h13),用线性最小二乘(ATAh=ATbA^TAh=A^TbATAh=ATb)或SVD 求解;介绍两大核心应用(全景拼接 :通过单应融合多图;相机位姿估计 :结合内参K从单应推导旋转矩阵R和平移向量t);还补充了透视n点(PnP)问题 (估计相机6DOF位姿,方法含EPnP)及相机标定(分标定板法和自标定法)。
思维导图
详细总结
前置回顾:相机参数与单应引入
文档开篇简要回顾相机参数,明确投影矩阵M=KRt\mathcal{M}=KR\\quad tM=KRt(KKK为内参,R/tR/tR/t为外参),投影关系为p=1zMPp=\frac{1}{z}\mathcal{M}Pp=z1MP(p=(u,v)Tp=(u,v)^Tp=(u,v)T为像素点,PPP为世界点),为后续单应性与3D位姿估计奠定基础。
单应性(Homography)基础定义
-
通用定义
单应性是保线、可逆的投影映射 (记为H:Pn→PnH:P^n→P^nH:Pn→Pn),由(n+1)×(n+1)(n+1)×(n+1)(n+1)×(n+1)非奇异矩阵表示,自由度为(n+1)2−1(n+1)^2-1(n+1)2−1(消除尺度歧义)。计算机视觉中重点关注2D单应性 (n=2n=2n=2)。
-
2D单应性核心特性
- 保线性:3个共线点经单应变换后仍共线;
- 矩阵形式:3×3非奇异矩阵,记为H=h11h12h13h21h22h23h31h32h33H=\begin{bmatrix}h_{11}&h_{12}&h_{13}\\h_{21}&h_{22}&h_{23}\\h_{31}&h_{32}&h_{33}\end{bmatrix}H= h11h21h31h12h22h32h13h23h33 ;
- 自由度(DOF):8个(3×3矩阵共9个元素,消除尺度因子后剩8个独立参数);
- 变换关系:齐次坐标下x′y′1∼Hxy1\begin{bmatrix}x'\\y'\\1\end{bmatrix} \sim H\begin{bmatrix}x\\y\\1\end{bmatrix} x′y′1 ∼H xy1 ,非齐次形式为:
x′=h11x+h12y+h13h31x+h32y+h33,y′=h21x+h22y+h23h31x+h32y+h33x'=\frac{h_{11}x+h_{12}y+h_{13}}{h_{31}x+h_{32}y+h_{33}},\quad y'=\frac{h_{21}x+h_{22}y+h_{23}}{h_{31}x+h_{32}y+h_{33}}x′=h31x+h32y+h33h11x+h12y+h13,y′=h31x+h32y+h33h21x+h22y+h23
单应变换层级(从特殊到一般)
单应变换是最一般的2D投影变换,包含从简单到复杂的4个层级,各层级的矩阵形式、自由度、不变量差异显著,具体对比如下:
| 变换层级 | 矩阵形式 | 自由度(DOF) | 核心不变量 | 适用场景 |
|---|---|---|---|---|
| 等距变换 | εcosθ−sinθtxεsinθcosθty001\begin{bmatrix}\varepsilon\cos\theta&-\sin\theta&t_x\\\varepsilon\sin\theta&\cos\theta&t_y\\0&0&1\end{bmatrix} εcosθεsinθ0−sinθcosθ0txty1 (ε=±1\varepsilon=\pm1ε=±1) | 3 | 长度、角度、面积 | 刚体运动(如物体平移旋转) |
| 缩放变换 | sr11sr12txsr21sr22ty001\begin{bmatrix}s r_{11}&s r_{12}&t_x\\s r_{21}&s r_{22}&t_y\\0&0&1\end{bmatrix} sr11sr210sr12sr220txty1 (s为缩放因子) | 4 | 角度 | 相似变换(如图像缩放+旋转) |
| 仿射变换 | a11a12txa21a22ty001\begin{bmatrix}a_{11}&a_{12}&t_x\\a_{21}&a_{22}&t_y\\0&0&1\end{bmatrix} a11a210a12a220txty1 (A为非奇异矩阵) | 6 | 平行线、平行长度比、面积比 | 非均匀缩放(如拉伸图像) |
| 单应变换 | h11h12h13h21h22h23h31h32h33\begin{bmatrix}h_{11}&h_{12}&h_{13}\\h_{21}&h_{22}&h_{23}\\h_{31}&h_{32}&h_{33}\end{bmatrix} h11h21h31h12h22h32h13h23h33 | 8 | 直线上四点的交比(Cross Ratio) | 透视畸变场景(如全景拼接) |
- 关键补充:交比(Cross Ratio) 是单应变换的核心不变量,定义为直线上四点x1,x2,x3,x4x_1,x_2,x_3,x_4x1,x2,x3,x4的比例关系,即Cross(x1,x2,x3,x4)=(x3−x1)(x4−x2)(x3−x2)(x4−x1)\text{Cross}(x_1,x_2,x_3,x_4)=\frac{(x_3-x_1)(x_4-x_2)}{(x_3-x_2)(x_4-x_1)}Cross(x1,x2,x3,x4)=(x3−x2)(x4−x1)(x3−x1)(x4−x2),变换后数值不变。
2D单应估计方法(从对应点到求解)
单应估计的核心是通过图像点对应关系求解3×3单应矩阵H,需满足以下条件与步骤:
-
核心前提
至少需要4对不共线的对应点(每对对应点提供2个方程,8个自由度需8个方程,4对对应点恰好满足)。
-
估计步骤与方程构建
-
步骤1:设定约束消除尺度歧义
方法1:设h33=1h_{33}=1h33=1(固定矩阵右下角元素为1,减少1个参数),此时非齐次方程可整理为线性形式:
h11x+h12y+h13−h31xx′−h32yx′=x′h_{11}x + h_{12}y + h_{13} - h_{31}xx' - h_{32}yx' = x'h11x+h12y+h13−h31xx′−h32yx′=x′
h21x+h22y+h23−h31xy′−h32yy′=y′h_{21}x + h_{22}y + h_{23} - h_{31}xy' - h_{32}yy' = y'h21x+h22y+h23−h31xy′−h32yy′=y′方法2:设∥h∥=1\|h\|=1∥h∥=1(矩阵元素的L2范数为1),适用于需严格约束尺度的场景。
-
步骤2:形成线性系统
对N对对应点,构建2N×8的矩阵A和2N×1的向量b,形成线性方程组Ah=bAh=bAh=b(方法1)或Ah=0Ah=0Ah=0(方法2)。
-
-
求解方法
约束类型 求解算法 核心公式/步骤 无约束(h33=1h_{33}=1h33=1) 线性最小二乘 h=(ATA)−1ATbh=(A^TA)^{-1}A^Tbh=(ATA)−1ATb,Matlab中可直接用h=A\bh=A\backslash bh=A\b求解 有约束(∣h∣=1|h|=1∣h∣=1) SVD分解(奇异值分解) 1. 计算ATAA^TAATA;2. 对ATAA^TAATA做SVD分解得U,D,VTU,D,V^TU,D,VT;3. 取V中最小特征值对应的列向量作为h -
超定情况处理
当对应点数N>4时(超定系统),通过最小化投影误差优化H,常用非线性最小二乘方法(如Levenberg-Marquardt算法)。
单应性的核心应用场景
-
应用1:全景拼接(Panorama Stitching)
目标是将多幅重叠图像融合为一幅宽视角全景图,步骤如下:
- 图像去畸变:消除镜头畸变(如桶形/枕形畸变),确保后续单应计算准确;
- 寻找对应点:通过特征检测算法(如SIFT、ORB)匹配多幅图像的重叠区域点;
- 计算单应H:用4对以上对应点估计相邻图像间的单应矩阵;
- 重采样与融合 :
- 遍历第一幅图像的像素,通过H投影到第二幅图像的对应位置;
- 用双线性插值填充投影后的像素值,避免锯齿;
- 融合多幅图像的重叠区域,生成全景图。
-
应用2:相机位姿估计(Camera Pose Estimation)
目标是通过单应矩阵推导相机的6DOF位姿(3个旋转参数R+3个平移参数t),适用于增强现实(AR)、机器人导航等场景,具体流程:
- 前提条件:已知相机内参矩阵K(需提前标定)、平面场景的单应H;
- 核心推导:
平面场景中(设Z=0),投影关系为x=Kr1,r2,tXx=Kr_1,r_2,tXx=Kr1,r2,tX,对比单应定义得H=λKr1,r2,tH=\lambda Kr_1,r_2,tH=λKr1,r2,t(λ为尺度因子);
两边左乘K−1K^{-1}K−1,得K−1H=λr1,r2,tK^{-1}H=\lambdar_1,r_2,tK−1H=λr1,r2,t,其中r1,r2r_1,r_2r1,r2是旋转矩阵R的前两列(需满足单位正交性); - 关键问题解决:
① 尺度因子λ不唯一:取r1r_1r1和r2r_2r2对应的λ的平均值;
② 旋转矩阵不正交:对初步估计的R′R'R′做SVD分解,令R=UVTR=UV^TR=UVT(U、V为正交矩阵),确保R的正交性; - 典型案例:标志物跟踪(如Aruco marker),步骤为"视频输入→标志物识别→计算单应→估计3D位姿→渲染虚拟物体并叠加到真实图像"。
透视n点(PnP)问题
PnP是单应位姿估计的扩展,适用于非平面场景,核心是通过3D-2D点对应关系估计相机外参:
-
问题定义
已知:① 3D物体点的世界坐标Xi=(Xi,Yi,Zi)X_i=(X_i,Y_i,Z_i)Xi=(Xi,Yi,Zi);② 对应的2D图像点坐标xi=(ui,vi)x_i=(u_i,v_i)xi=(ui,vi);③ 相机内参K(已标定);
求解:相机外参------旋转矩阵R(3参数)、平移向量t(3参数),共6个自由度。
-
常用求解方法
方法名称 核心特点 适用场景 P3P 仅需3对对应点,直接求解,但鲁棒性较差 点少且噪声小的场景 EPnP O(n)复杂度,OpenCV默认方法,用4个控制点表示所有点 实时场景(如机器人视觉) DLT 基于直接线性变换,需6对以上对应点 高精度、非实时场景 UPnP 鲁棒性强,适用于噪声较大的对应点数据 复杂环境(如户外导航) -
应用案例:Aruco标志物跟踪
- 准备工作:打印Aruco标志物(如6×6网格),标定相机获取内参K;
- 流程:
- 视频输入:通过摄像头采集含标志物的图像;
- 标志物检测:识别标志物的4个角点(3D-2D对应点);
- PnP求解:用EPnP估计相机相对于标志物的位姿(R,t);
- 渲染叠加:将虚拟物体(如3D立方体)按位姿渲染,叠加到真实图像。
相机标定(Camera Calibration)
相机标定是求解内参和外参的关键步骤,直接影响单应估计和PnP位姿的精度:
-
核心目标
求解相机的内参 (α,β,u0,v0,θ\alpha,\beta,u_0,v_0,\thetaα,β,u0,v0,θ)和外参(每幅标定图像对应的R,t),消除镜头畸变影响。
-
方法分类
标定方法 核心特点 优点 缺点 基于标定板 利用已知结构的标定目标(如棋盘格) 精度高,适用于所有相机模型 流程复杂,需高精度标定板 自标定 仅用多幅图像的对应点,无需标定目标 灵活性高,适用无标定板场景 非线性问题,鲁棒性低,易受噪声影响 -
线性标定流程
以基于棋盘格的标定为例,步骤如下:
- 拍摄标定板:从不同角度拍摄至少10幅含棋盘格的图像;
- 识别图像点:自动或手动标记棋盘格的角点(已知世界坐标);
- 构建方程 :根据投影关系u=m1⋅Pm3⋅Pu=\frac{m_1\cdot P}{m_3\cdot P}u=m3⋅Pm1⋅P,v=m2⋅Pm3⋅Pv=\frac{m_2\cdot P}{m_3\cdot P}v=m3⋅Pm2⋅P构建线性方程组;
- 求解参数 :
- 初步求解:用线性最小二乘得到内参和外参的初始值;
- 优化迭代:用非线性最小二乘(如Gaussian-Newton算法)最小化投影误差,优化参数。
作业任务
- Homework1:纯旋转相机场景下,推导并计算单应矩阵H(提示:纯旋转时平移t=0,投影矩阵简化);
- Homework2:给定3cm×3cm网格的图像,用文档介绍的单应估计方法(如4点法+线性最小二乘)计算单应矩阵。
关键问题
单应变换的4个层级(等距、缩放、仿射、单应)在自由度、不变量上有何核心差异?这些差异决定了它们各自的适用场景是什么?
单应变换的4个层级从特殊到一般,自由度、不变量及适用场景差异显著,具体如下:
| 变换层级 | 自由度(DOF) | 核心不变量 | 适用场景 |
|---|---|---|---|
| 等距变换 | 3 | 长度、角度、面积 | 刚体运动场景(如机器人抓取物体时的视觉定位,需保持物体尺寸和角度不变) |
| 缩放变换 | 4 | 角度 | 相似变换场景(如图像缩放+旋转,需保持物体形状不变仅改变大小,如证件照裁剪) |
| 仿射变换 | 6 | 平行线、平行长度比、面积比 | 非均匀缩放场景(如图像拉伸、挤压,需保持平行线关系,如UI设计中的图像变形) |
| 单应变换 | 8 | 直线上四点的交比 | 透视畸变场景(如全景拼接、相机位姿估计,需处理不同视角的透视差异) |
核心逻辑:层级越一般(如单应),自由度越高,不变量越少,适用场景越复杂(如透视畸变);层级越特殊(如等距),自由度越低,不变量越多,适用场景越简单(如刚体运动)。
估计2D单应矩阵H需要多少对对应点?为什么?当对应点数超过所需数量时,如何处理超定系统以提高H的精度?
-
所需对应点数 :至少4对不共线的对应点 。
原因:2D单应矩阵H是3×3非奇异矩阵,共9个元素,但存在1个尺度歧义(即kH与H表示同一单应,k≠0),因此实际自由度为8个 ;每对对应点((x,y)(x,y)(x,y)与(x′,y′)(x',y')(x′,y′))可提供2个线性方程(从非齐次投影公式推导),8个自由度需8个方程,故需4对对应点(4×2=8个方程)。
-
超定系统处理(对应点数N>4) :
当对应点数超过4时,系统为超定(方程数2N>8),此时需通过最小化投影误差优化H,常用方法如下:
- 第一步:用线性最小二乘求解初始H,公式为h=(ATA)−1ATbh=(A^TA)^{-1}A^Tbh=(ATA)−1ATb(A为2N×8矩阵,b为2N×1向量);
- 第二步:用非线性最小二乘优化,如Levenberg-Marquardt算法,目标函数为最小化所有对应点的投影误差(即真实图像点与H投影得到的预测点之间的欧氏距离);
- 核心目的:消除噪声对对应点的影响,使估计的H更符合实际投影关系,提高后续应用(如全景拼接、位姿估计)的精度。
如何利用单应矩阵H估计相机的6DOF位姿(R,t)?推导过程中会遇到哪些关键问题?如何解决这些问题?
-
位姿估计的前提与推导过程:
- 前提:① 场景为平面(设世界坐标系中平面Z=0);② 已知相机内参矩阵K(需提前标定);③ 已估计出平面场景的单应矩阵H。
- 核心推导:
平面场景的投影关系为x=Kr1,r2,tXx=Kr_1,r_2,tXx=Kr1,r2,tX(r1,r2r_1,r_2r1,r2为旋转矩阵R的前两列,t为平移向量);
对比单应矩阵的定义(x=HXx=HXx=HX),可得H=λKr1,r2,tH=\lambda Kr_1,r_2,tH=λKr1,r2,t(λ为尺度因子);
两边左乘K−1K^{-1}K−1,得K−1H=λr1,r2,tK^{-1}H=\lambdar_1,r_2,tK−1H=λr1,r2,t,由此可分离出r1,r2,tr_1,r_2,tr1,r2,t的初步估计(除以λ)。
-
推导中的关键问题与解决方案:
关键问题 产生原因 解决方案 尺度因子λ不唯一 r1r_1r1和r2r_2r2从K−1HK^{-1}HK−1H分离时,λ可能不同 计算r1r_1r1和r2r_2r2对应的λ(如λ1=∣K−1H\lambda_1=|K^{-1}Hλ1=∣K−1H的第1列|,λ2=∣K−1H\lambda_2=|K^{-1}Hλ2=∣K−1H的第2列|),取两者的平均值作为最终λ 初步估计的旋转矩阵不正交 噪声或对应点误差导致r1⋅r2≠0r_1\cdot r_2≠0r1⋅r2=0或∣r1∣≠1|r_1|≠1∣r1∣=1 对初步旋转矩阵R′=r1,r2,r1×r2R'=r_1,r_2,r_1×r_2R′=r1,r2,r1×r2做SVD分解得R′=UVTR'=UV^TR′=UVT,令R=UVTR=UV^TR=UVT(U、V为正交矩阵),确保R满足正交性(RTR=IR^TR=IRTR=I) -
最终位姿确定 :
旋转矩阵R的第三列r3=r1×r2r_3=r_1×r_2r3=r1×r2(叉乘),平移向量t由t=1λ⋅(K−1Ht=\frac{1}{\lambda}\cdot(K^{-1}Ht=λ1⋅(K−1H的第3列)计算,最终得到相机的6DOF位姿(R,t),可用于增强现实(AR)中虚拟物体的叠加。
5.相机标定
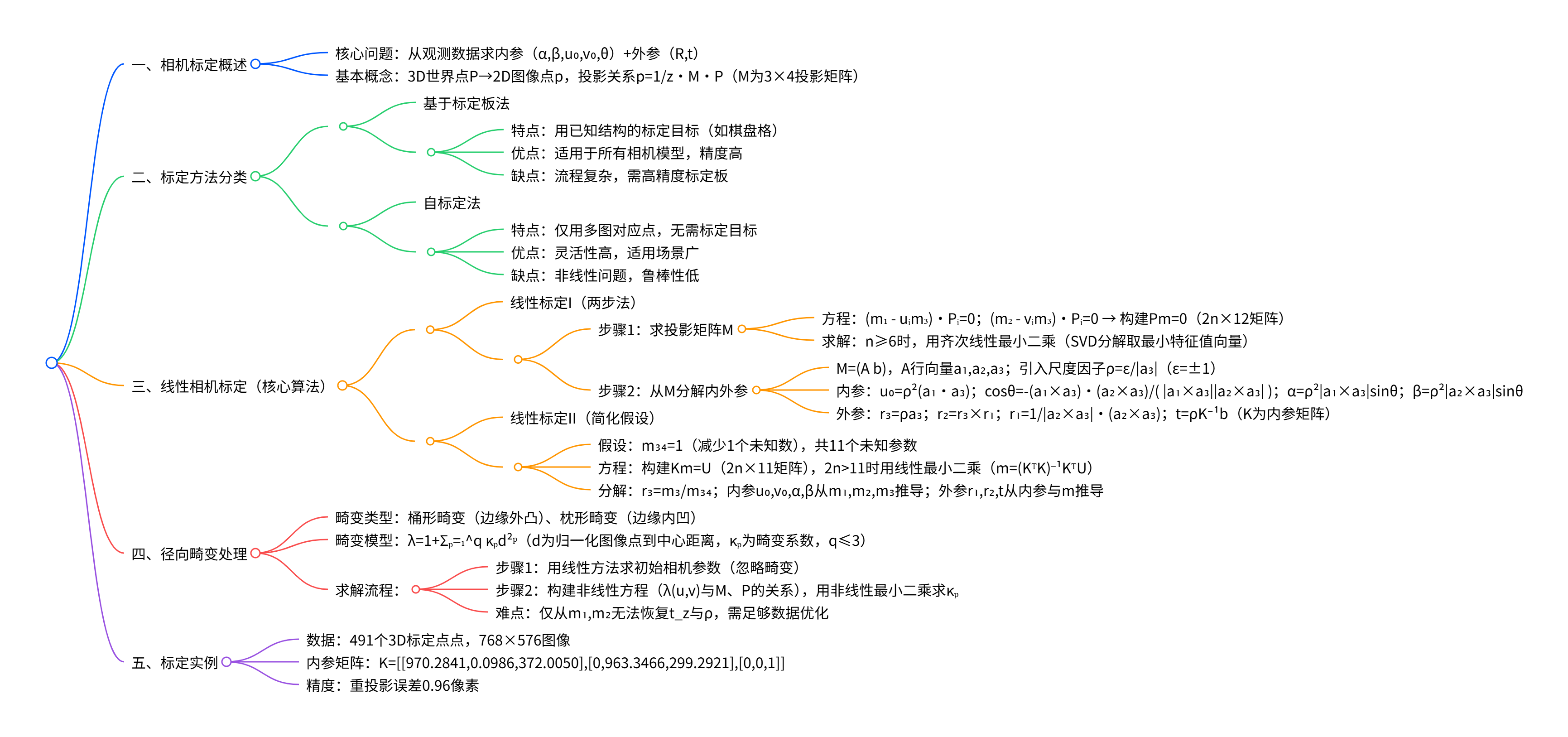
核心目标是通过观测数据求解相机内参(α,β,u₀,v₀,θ) 与外参(旋转矩阵R、平移向量t) ;首先将标定方法分为基于标定板法 (高精度、需已知场景结构)与自标定法 (灵活、非线性鲁棒性低)两类;重点阐述线性标定两步法(先通过线性最小二乘求解3×4透视投影矩阵M,再从M分解内外参,需至少6个3D-2D对应点),并补充线性标定II(假设m₃₄=1简化求解);还详细说明径向畸变(桶形/枕形)的建模(λ=1+Σκₚd²ᵖ,κₚ为畸变系数)与非线性求解流程;最后给出标定实例(内参矩阵、重投影误差0.96像素),完整覆盖相机标定的问题定义、方法分类、核心算法及误差处理。
思维导图
详细总结
相机标定核心定义与问题
-
核心目标
通过相机拍摄的3D世界点P(已知坐标) 与对应的2D图像点p(观测坐标),求解相机的两类关键参数:
- 内参:描述相机光学/电学特性,包括尺度因子α(x方向)、β(y方向)、主点坐标(u₀,v₀)、轴夹角θ(理想90°);
- 外参:描述相机在世界坐标系中的姿态,包括旋转矩阵R(3×3正交矩阵)、平移向量t(3×1向量)。
-
投影关系基础
3D点到2D点的投影通过3×4透视投影矩阵M 实现,齐次坐标下公式为:
zuivi1=MPixPiyPiz1z\begin{bmatrix}u_i\\v_i\\1\end{bmatrix}=M\begin{bmatrix}P_{ix}\\P_{iy}\\P_{iz}\\1\end{bmatrix}z uivi1 =M PixPiyPiz1其中z为3D点在相机坐标系中的深度,M可分解为内参矩阵K与外参矩阵R t的乘积,即M=KRtM=KR\\quad tM=KRt。
相机标定方法分类
两类方法在原理、精度、适用场景上差异显著,具体对比如下:
| 标定方法 | 核心特点 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| 基于标定板法 | 依赖已知结构的标定目标(如棋盘格、3D标定 rig) | 1. 适用于所有相机模型; 2. 标定精度高 | 1. 流程复杂(需多角度拍摄); 2. 对标定板精度要求高 | 高精度场景(如工业检测、3D重建) |
| 自标定法 | 仅利用多幅图像间的点对应关系,无需标定目标 | 1. 灵活性高; 2. 无需预设场景结构 | 1. 非线性优化问题; 2. 鲁棒性低(易受噪声影响) | 无标定板场景(如户外导航、动态场景) |
线性相机标定算法(核心内容)
文档详细介绍两种线性标定思路,均通过"构建线性方程→求解投影矩阵M→分解内外参"实现,核心差异在于M的求解约束不同。
1. 线性标定I(标准两步法)
适用于无特殊假设的场景,需至少6个3D-2D对应点(n≥6),步骤如下:
| 步骤 | 核心任务 | 方程/算法 | 关键细节 |
|---|---|---|---|
| 1 | 构建线性方程组 | 对每个对应点(i),由投影关系推导: (m1−uim3)⋅P⃗i=0(m_1 - u_i m_3)·\vec{P}_i = 0(m1−uim3)⋅P i=0 (m2−vim3)⋅P⃗i=0(m_2 - v_i m_3)·\vec{P}_i = 0(m2−vim3)⋅P i=0 | 堆叠n个点的方程,形成2n×12的矩阵P和12×1的向量m(M的元素),得到齐次方程Pm=0Pm=0Pm=0 |
| 2 | 求解投影矩阵M | 齐次线性最小二乘:对P做SVD分解,取PTPP^TPPTP最小特征值对应的特征向量作为m | M为3×4矩阵,需满足单位Frobenius范数(|m|=1) |
| 3 | 从M分解内外参 | 设M=(Ab)M=(A\quad b)M=(Ab)(A为3×3矩阵,b为3×1向量),引入尺度因子ρ=ε/ | a₃ |
| 4 | 计算内参 | - u0=ρ2(a1⋅a3)u_0=ρ²(a₁·a₃)u0=ρ2(a1⋅a3)(主点x坐标) - $cosθ=-(a₁×a₃)·(a₂×a₃)/( | a₁×a₃ |
| 5 | 计算外参 | - 旋转矩阵R:$r₁=1/ | a₂×a₃ |
2. 线性标定II(简化假设法)
通过假设m34=1m_{34}=1m34=1(M第3行第4列元素为1)减少未知数,步骤如下:
- 简化约束 :M共12个元素,设m34=1m_{34}=1m34=1后剩11个未知参数,记为m;
- 构建方程 :对n个对应点,构建2n×11的矩阵K和2n×1的向量U,形成线性方程组Km=UKm=UKm=U;
- 求解M :当2n>11(超定系统)时,用线性最小二乘求解m=(KTK)−1KTUm=(K^TK)^{-1}K^TUm=(KTK)−1KTU,进而构建M;
- 分解参数 :
- 旋转矩阵:r3=m3/m34r₃=m₃/m_{34}r3=m3/m34(m₃为M第3行前3个元素);r1=(m1−u0m3)⋅m34/αr₁=(m₁ - u₀m₃)·m_{34}/αr1=(m1−u0m3)⋅m34/α;r2=(m2−v0m3)⋅m34/βr₂=(m₂ - v₀m₃)·m_{34}/βr2=(m2−v0m3)⋅m34/β;
- 平移向量:tx=(m14−u0)⋅m34/αt_x=(m_{14} - u₀)·m_{34}/αtx=(m14−u0)⋅m34/α;ty=(m24−v0)⋅m34/βt_y=(m_{24} - v₀)·m_{34}/βty=(m24−v0)⋅m34/β;tz=m34t_z=m_{34}tz=m34。
四、径向畸变处理(误差补偿)
镜头制造缺陷会导致径向畸变(边缘光线投影偏差),文档重点介绍其建模与求解:
-
畸变类型
- 桶形畸变(Barrel):图像边缘向外凸;
- 枕形畸变(Pin Cushion):图像边缘向内凹;
- 无畸变(理想镜头,仅理论存在)。
-
畸变模型
假设图像中心为主点(u₀=v₀=0),畸变通过缩放因子λ修正,λ为归一化距离d²(图像点到中心距离的平方)的多项式:
λ=1+∑p=1qκpd2p\lambda=1+\sum_{p=1}^q \kappa_p d^{2p}λ=1+p=1∑qκpd2p其中:
- q≤3(低次多项式,避免过拟合);
- κₚ为径向畸变系数(需求解的未知量);
- d2=u^2+v^2d²=\hat{u}^2+\hat{v}^2d2=u^2+v^2(u^,v^\hat{u},\hat{v}u^,v^为归一化图像坐标,由物理坐标与内参转换得到)。
-
求解流程
- 步骤1:忽略畸变,用线性标定求解初始内参(K)与外参(R,t);
- 步骤2:构建非线性方程:λuv=1m3⋅Pm1⋅Pm2⋅P\lambda\begin{bmatrix}u\\v\end{bmatrix}=\frac{1}{m_3·P}\begin{bmatrix}m_1·P\\m_2·P\end{bmatrix}λuv=m3⋅P1m1⋅Pm2⋅P,代入λ模型;
- 步骤3:用非线性最小二乘(如Levenberg-Marquardt算法)优化κₚ、t_z、ρ(仅从m₁,m₂无法恢复t_z,需足够数据约束)。
标定实例(验证效果)
文档给出具体标定案例,验证算法有效性:
- 标定数据:491个3D标定点点(来自标定rig),对应768×576分辨率图像的2D点;
- 内参矩阵 :
K=970.28410.0986372.00500963.3466299.2921001K=\begin{bmatrix}970.2841&0.0986&372.0050\\0&963.3466&299.2921\\0&0&1\end{bmatrix}K= 970.2841000.0986963.34660372.0050299.29211 - 标定精度 :重投影误差(真实2D点与M投影点的欧氏距离)为0.96像素,精度满足多数计算机视觉场景需求。
关键问题
基于标定板法与自标定法在原理、精度、适用场景上有何核心差异?选择时需优先考虑哪些因素?
两类方法的核心差异如下表,选择时需优先考虑"精度需求""场景约束""流程复杂度":
| 对比维度 | 基于标定板法 | 自标定法 |
|---|---|---|
| 原理 | 利用已知结构的标定目标(如棋盘格),构建3D-2D对应关系 | 仅利用多幅图像间的点对应关系,无需预设场景结构 |
| 精度 | 高(标定板结构已知,误差可控) | 低(非线性优化易受噪声影响,鲁棒性差) |
| 流程复杂度 | 复杂(需多角度拍摄标定板,确保点覆盖全视场) | 简单(仅需采集多幅重叠图像) |
| 适用场景 | 高精度需求场景(工业检测、3D重建、AR位姿估计) | 无标定板场景(户外导航、动态场景、无法布置标定目标的环境) |
选择因素:若场景允许布置标定板且需高精度(如工业零件尺寸测量),优先选基于标定板法;若场景动态或无法预设标定目标(如无人机户外飞行),则选自标定法。
线性标定I的核心步骤是"求解投影矩阵M→分解内外参",请详细说明M的求解方程如何构建,以及从M分解内参(u₀,α,θ)的关键公式与逻辑。
-
投影矩阵M的求解方程构建 :
对每个3D-2D对应点(i),由投影关系ui=m1⋅P⃗im3⋅P⃗iu_i=\frac{m_1·\vec{P}_i}{m_3·\vec{P}_i}ui=m3⋅P im1⋅P i、vi=m2⋅P⃗im3⋅P⃗iv_i=\frac{m_2·\vec{P}_i}{m_3·\vec{P}_i}vi=m3⋅P im2⋅P i(m₁,m₂,m₃为M的行向量),整理得齐次方程:
(m1−uim3)⋅P⃗i=0(m_1 - u_i m_3)·\vec{P}_i = 0(m1−uim3)⋅P i=0
(m2−vim3)⋅P⃗i=0(m_2 - v_i m_3)·\vec{P}_i = 0(m2−vim3)⋅P i=0对n个点,堆叠上述方程形成2n×12的矩阵P (每行对应1个方程,列对应M的12个元素)和12×1的向量m (M的元素),最终得到齐次线性系统Pm=0Pm=0Pm=0。当n≥6时,通过SVD分解PTPP^TPPTP,取最小特征值对应的特征向量作为m,即M的元素。
-
从M分解内参(u₀,α,θ)的关键公式与逻辑:
- 步骤1:拆分M为M=(Ab)M=(A\quad b)M=(Ab)(A为3×3矩阵,a₁,a₂,a₃为A的行向量),引入尺度因子ρ=ϵ/∣a3∣\rho=\epsilon/|a_3|ρ=ϵ/∣a3∣(ε=±1,确保α,β为正,|a₃|为a₃的L2范数);
- 步骤2:求主点u₀:利用旋转矩阵行向量的正交性(r₁·r₃=0),推导得u0=ρ2(a1⋅a3)u_0=\rho²(a₁·a₃)u0=ρ2(a1⋅a3);
- 步骤3:求轴夹角θ:θ为相机X/Y轴的夹角,利用r₁与r₂的正交性,推导得cosθ=−(a1×a3)⋅(a2×a3)∣a1×a3∣⋅∣a2×a3∣cosθ=-\frac{(a₁×a₃)·(a₂×a₃)}{|a₁×a₃|·|a₂×a₃|}cosθ=−∣a1×a3∣⋅∣a2×a3∣(a1×a3)⋅(a2×a3)(叉乘确保向量垂直于a₃,对应r₁,r₂的方向);
- 步骤4:求x尺度因子α:α为焦距与像素水平尺寸的比值,利用r₁的单位性(|r₁|=1),推导得α=ρ2∣a1×a3∣sinθα=ρ²|a₁×a₃|sinθα=ρ2∣a1×a3∣sinθ(sinθ由θ的余弦值计算,因θ接近90°,sinθ为正)。
径向畸变会导致图像边缘偏差,如何建立畸变模型?求解畸变系数κₚ时面临的核心难点是什么?如何解决?
-
径向畸变模型的建立 :
文档采用多项式缩放模型 修正畸变,核心思路是:畸变图像点(u,v)由无畸变点(u^,v^\hat{u},\hat{v}u^,v^)经缩放因子λ修正得到,即(u,v)=λ(u^,v^)(u,v)=\lambda(\hat{u},\hat{v})(u,v)=λ(u^,v^),其中λ为归一化距离d²(无畸变点到图像中心的距离平方)的低次多项式:
λ=1+∑p=1qκpd2p\lambda=1+\sum_{p=1}^q \kappa_p d^{2p}λ=1+p=1∑qκpd2p式中:
- q≤3(避免过拟合,通常取q=1或2);
- κₚ为待求解的径向畸变系数;
- d2=u^2+v^2d²=\hat{u}^2+\hat{v}^2d2=u^2+v^2(u^,v^\hat{u},\hat{v}u^,v^为无畸变的归一化图像坐标,由物理坐标与内参转换:u^=uα+vcosθβ\hat{u}=\frac{u}{\alpha}+\frac{v cosθ}{\beta}u^=αu+βvcosθ,v^=vsinθ∣β∣\hat{v}=\frac{v sinθ}{|\beta|}v^=∣β∣vsinθ)。
-
求解κₚ的核心难点与解决方法:
- 核心难点:仅通过m₁(M第1行)和m₂(M第2行)无法同时恢复尺度因子ρ、平移分量t_z和畸变系数κₚ------因畸变模型引入非线性项(λ中的d²ᵖ),且t_z的信息仅存在于M的第3行(m₃),而m₃未参与初始线性求解(仅用m₁,m₂构建方程)。
- 解决方法 :
- 两步法优化:先忽略畸变,用线性标定求解初始内参(K)、外参(R,r₃);
- 非线性最小二乘:构建目标函数(最小化"畸变修正后的投影点"与"真实图像点"的误差),代入λ模型和M的投影关系,联合优化κₚ、ρ、t_z;
- 数据约束:采集足够多的3D-2D对应点(n≥8),形成超定系统,确保非线性优化有唯一解(如文档中用491个标定点点,保证精度)。
6.相机标定II
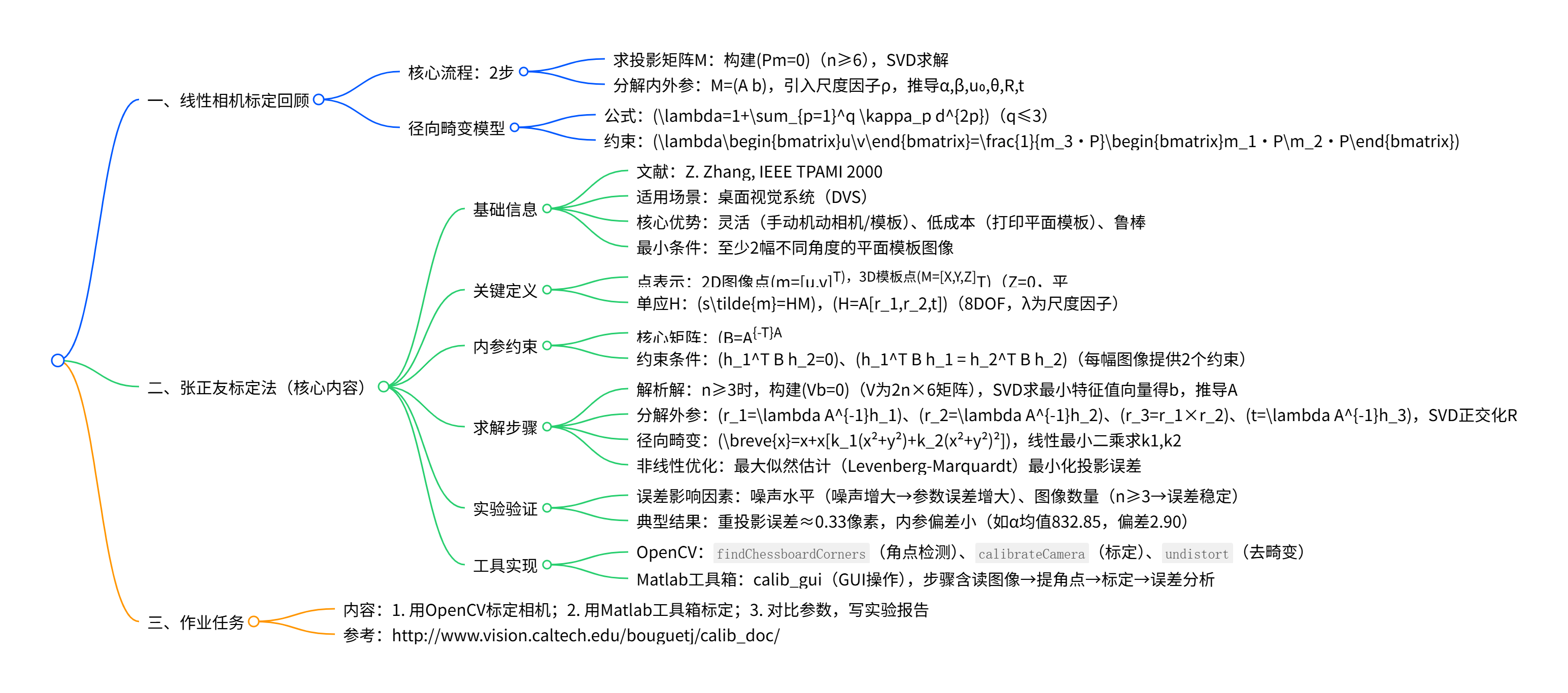
先回顾线性相机标定的两步流程(求解透视投影矩阵M→分解内外参)及径向畸变模型(λ=1+∑p=1qκpd2p\lambda=1+\sum_{p=1}^q \kappa_p d^{2p}λ=1+∑p=1qκpd2p);随后详细阐述张正友方法的核心------仅需相机观测至少2个不同角度的平面模板 ,通过建立"平面模板与图像间的单应H",利用内参约束(h1TA−TA−1h2=0h_1^T A^{-T} A^{-1} h_2=0h1TA−TA−1h2=0、h1TA−TA−1h1=h2TA−TA−1h2h_1^T A^{-T} A^{-1} h_1 = h_2^T A^{-T} A^{-1} h_2h1TA−TA−1h1=h2TA−TA−1h2)求解内参矩阵A(含α,β,u₀,v₀,γ),再分解外参(R,t),并通过非线性最大似然估计(Levenberg-Marquardt算法) 优化参数;还介绍了该方法的实验验证(噪声水平与图像数量对误差的影响)、工具实现(OpenCV函数如calibrateCamera、Matlab标定工具箱)。
思维导图
详细总结
线性相机标定回顾(前置知识)
-
线性标定核心流程(两步法)
- 步骤1:求解透视投影矩阵M
对n个3D-2D对应点,构建齐次线性方程组Pm=0Pm=0Pm=0(P为2n×12矩阵,m为M的12个元素),当n≥6 时,通过SVD分解PTPP^TPPTP,取最小特征值对应的特征向量作为m,得到3×4的M。 - 步骤2:分解内外参
将M拆分为M=(Ab)M=(A\quad b)M=(Ab)(A为3×3矩阵,b为3×1向量),引入尺度因子ρ=ϵ/∣a3∣\rho=\epsilon/|a_3|ρ=ϵ/∣a3∣(ε=±1,a₃为A的第3行),利用旋转矩阵的正交性(RTR=IR^TR=IRTR=I)推导内参(α,β,u₀,θ)和外参(R,t)。
- 步骤1:求解透视投影矩阵M
-
径向畸变模型回顾
镜头畸变用缩放因子λ修正,λ为归一化距离d²的低次多项式:
λ=1+∑p=1qκpd2p\lambda=1+\sum_{p=1}^q \kappa_p d^{2p}λ=1+p=1∑qκpd2p其中:q≤3(避免过拟合),d2=u2α2+v2β2+2uvαβcosθd²=\frac{u²}{\alpha²}+\frac{v²}{\beta²}+2\frac{uv}{\alpha\beta}cosθd2=α2u2+β2v2+2αβuvcosθ(u,v为图像点坐标),约束关系为λuv=1m3⋅Pm1⋅Pm2⋅P\lambda\begin{bmatrix}u\\v\end{bmatrix}=\frac{1}{m_3·P}\begin{bmatrix}m_1·P\\m_2·P\end{bmatrix}λuv=m3⋅P1m1⋅Pm2⋅P。
张正友标定法(核心章节)
张正友标定法是文档重点,发表于2000年IEEE TPAMI期刊,是计算机视觉中应用最广泛的标定方法之一,具体内容分模块详解:
1. 方法基础与优势
| 维度 | 具体内容 |
|---|---|
| 适用场景 | 桌面视觉系统(DVS),如工业检测、机器人视觉 |
| 核心特点 | 1. 灵活性 :相机或平面模板可手动机动,无需精密设备; 2. 低成本 :模板可打印在平面上; 3. 鲁棒性:抗噪声能力强,超定系统优化 |
| 最小条件 | 至少拍摄2幅不同角度的平面模板图像(n≥3时内参有唯一解) |
| 模板要求 | 平面结构(如棋盘格),已知模板点的世界坐标(通常设Z=0,简化计算) |
2. 关键定义与单应性
- 点的表示 :
- 2D图像点:m=u,vTm=u,v^Tm=u,vT,齐次形式m~=u,v,1T\tilde{m}=u,v,1^Tm~=u,v,1T;
- 3D模板点:M=X,Y,ZTM=X,Y,Z^TM=X,Y,ZT(因模板平面,设Z=0),齐次形式M~=X,Y,0,1T\tilde{M}=X,Y,0,1^TM~=X,Y,0,1T。
- 单应矩阵H :
平面模板与其图像间存在单应关系,满足sm~=HM~s\tilde{m}=H\tilde{M}sm~=HM~(s为尺度因子),且H=Ar1,r2,tH=Ar_1,r_2,tH=Ar1,r2,t------A为内参矩阵,r1,r2r_1,r_2r1,r2为旋转矩阵R的前两列,t为平移向量。
H为3×3矩阵,含8个自由度(消除尺度歧义)。
3. 内参约束与求解
张正友方法的核心是利用旋转矩阵的正交性,建立内参的约束条件:
- 核心矩阵B :定义B=A−TA−1B=A^{-T}A^{-1}B=A−TA−1,B为3×3对称矩阵,仅含6个独立参数 (b=B₁₁,B₁₂,B₂₂,B₁₃,B₂₃,B₃₃^T),与内参的关系如下:
B=1α2−γα2βv0γ−u0βα2β−γα2βγ2α2β2+1β2−γ(v0γ−u0β)α2β2−v0β2v0γ−u0βα2β−γ(v0γ−u0β)α2β2−v0β2(v0γ−u0β)2α2β2+v02β2+1B=\begin{bmatrix}\frac{1}{\alpha²}&-\frac{\gamma}{\alpha²\beta}&\frac{v₀\gamma - u₀\beta}{\alpha²\beta}\\-\frac{\gamma}{\alpha²\beta}&\frac{\gamma²}{\alpha²\beta²}+\frac{1}{\beta²}&-\frac{\gamma(v₀\gamma - u₀\beta)}{\alpha²\beta²}-\frac{v₀}{\beta²}\\\frac{v₀\gamma - u₀\beta}{\alpha²\beta}&-\frac{\gamma(v₀\gamma - u₀\beta)}{\alpha²\beta²}-\frac{v₀}{\beta²}&\frac{(v₀\gamma - u₀\beta)²}{\alpha²\beta²}+\frac{v₀²}{\beta²}+1\end{bmatrix}B= α21−α2βγα2βv0γ−u0β−α2βγα2β2γ2+β21−α2β2γ(v0γ−u0β)−β2v0α2βv0γ−u0β−α2β2γ(v0γ−u0β)−β2v0α2β2(v0γ−u0β)2+β2v02+1 - 约束条件 :
因r1Tr2=0r_1^T r_2=0r1Tr2=0且r1Tr1=r2Tr2=1r_1^T r_1=r_2^T r_2=1r1Tr1=r2Tr2=1,代入H=λAr1,r2,tH=\lambda Ar_1,r_2,tH=λAr1,r2,t(λ为尺度因子),推导得:- h1TBh2=0h_1^T B h_2=0h1TBh2=0(r₁与r₂正交);
- h1TBh1=h2TBh2h_1^T B h_1 = h_2^T B h_2h1TBh1=h2TBh2(r₁与r₂模长相等)。
(h1,h2h_1,h_2h1,h2为H的前两列)
- 解析解求解 :
对n幅图像,每幅图像提供2个约束,构建2n×6的矩阵V和方程Vb=0Vb=0Vb=0:- 当n≥3 时,V为超定矩阵,对VTVV^TVVTV做SVD分解,取最小特征值对应的特征向量作为b;
- 当n=2时,需额外施加无畸变约束(γ=0);
- 当n=1时,仅能求解α,β(需已知u₀,v₀且γ=0)。
由b推导内参的公式如下:
{v0=B12B13−B11B23B11B22−B122λ=B33−B132+v0(B12B13−B11B23)B11α=λB11β=λB11B11B22−B122γ=−B12α2βλu0=γv0α−B13α2λ \begin{cases} v₀=\frac{B₁₂B₁₃ - B₁₁B₂₃}{B₁₁B₂₂ - B₁₂²} \\ \lambda=B₃₃ - \frac{B₁₃² + v₀(B₁₂B₁₃ - B₁₁B₂₃)}{B₁₁} \\ \alpha=\sqrt{\frac{\lambda}{B₁₁}} \\ \beta=\sqrt{\frac{\lambda B₁₁}{B₁₁B₂₂ - B₁₂²}} \\ \gamma=-\frac{B₁₂\alpha²\beta}{\lambda} \\ u₀=\frac{\gamma v₀}{\alpha} - \frac{B₁₃\alpha²}{\lambda} \end{cases} ⎩ ⎨ ⎧v0=B11B22−B122B12B13−B11B23λ=B33−B11B132+v0(B12B13−B11B23)α=B11λ β=B11B22−B122λB11 γ=−λB12α2βu0=αγv0−λB13α2
4. 外参分解与优化
- 外参分解 :
已知A和H,由H=λAr1,r2,tH=\lambda Ar_1,r_2,tH=λAr1,r2,t推导:
r1=λA−1h1,r2=λA−1h2,r3=r1×r2,t=λA−1h3r_1=\lambda A^{-1}h_1,\quad r_2=\lambda A^{-1}h_2,\quad r_3=r_1×r_2,\quad t=\lambda A^{-1}h_3r1=λA−1h1,r2=λA−1h2,r3=r1×r2,t=λA−1h3
因噪声影响,初步得到的R可能不正交,需通过SVD分解(R′=UVTR'=UV^TR′=UVT)正交化。 - 径向畸变处理 :
设理想图像点为(u,v),实际观测点为(u˘,v˘\breve{u},\breve{v}u˘,v˘),归一化坐标为(x,y),畸变模型为:
x˘=x+xk1(x2+y2)+k2(x2+y2)2,y˘=y+yk1(x2+y2)+k2(x2+y2)2\breve{x}=x+xk_1(x²+y²)+k_2(x²+y²)²,\quad \breve{y}=y+yk_1(x²+y²)+k_2(x²+y²)²x˘=x+xk1(x2+y2)+k2(x2+y2)2,y˘=y+yk1(x2+y2)+k2(x2+y2)2
代入u˘=u0+αx+γy\breve{u}=u₀+\alpha x+\gamma yu˘=u0+αx+γy、v˘=v0+βy\breve{v}=v₀+\beta yv˘=v0+βy,构建线性方程组Dk=dDk=dDk=d(D为2mn×2矩阵,k=k₁,k₂^T),用线性最小二乘求解k=(DTD)−1DTdk=(D^TD)^{-1}D^Tdk=(DTD)−1DTd。 - 非线性优化 :
通过最大似然估计 (Levenberg-Marquardt算法)最小化投影误差,目标函数为:
∑i=1n∑j=1m∥m˘ij−m(A,k1,k2,Ri,ti,Mj)∥2\sum_{i=1}^n\sum_{j=1}^m \|\breve{m}{ij} - m(A,k₁,k₂,R_i,t_i,M_j)\|²i=1∑nj=1∑m∥m˘ij−m(A,k1,k2,Ri,ti,Mj)∥2
(m˘ij\breve{m}{ij}m˘ij为第i幅图像第j个点的观测值,m(·)为投影计算值)
5. 实验验证结果
文档给出实验数据,验证方法的稳定性与精度:
| 实验指标 | 结果示例 |
|---|---|
| 内参稳定性 | α均值832.85(偏差2.90),β均值832.90(偏差2.84),u₀均值304.18(偏差0.44) |
| 径向畸变系数 | k₁均值-0.229(偏差0.001),k₂均值0.190(偏差0.006) |
| 重投影误差 | 均值0.334像素(偏差0.04) |
| 噪声影响 | 噪声从0→1.6像素,参数误差逐渐增大(如α误差从0→0.8) |
| 图像数量影响 | 图像数从1→17,参数误差从1.0→0.2(n≥3后误差稳定) |
6. 工具实现(OpenCV与Matlab)
-
OpenCV关键函数:
函数名 功能 findChessboardCorners检测棋盘格角点,返回角点坐标 calibrateCamera输入3D模板点、2D图像点,输出内参矩阵、畸变系数、旋转向量(rvecs)、平移向量(tvecs) undistort用标定得到的内参和畸变系数,对图像去畸变 initCameraMatrix2D初始化内参矩阵 -
Matlab标定工具箱操作步骤:
- 下载工具箱:http://www.vision.caltech.edu/bouguetj/calib_doc/,添加到Matlab路径;
- 运行
calib_gui,选择"Standard"模式; - 读取图像:输入图像basename(如Image)和格式(如tif);
- 提取角点:点击"Extract grid corners",选择图像,手动点击4个角点确定模板范围,输入方格尺寸(如30mm);
- 标定:点击"Calibration",自动完成解析解与非线性优化;
- 结果分析:查看内参、外参(3D可视化)、重投影误差(彩色编码)。
作业任务
文档布置实践作业,强化标定方法的应用能力:
- 任务内容 :
- 用OpenCV编写程序,基于TA提供的图像完成相机标定;
- 用Matlab相机标定工具箱完成同一相机的标定;
- 对比两种方法得到的内参(α,β,u₀,v₀,γ)、畸变系数(k₁,k₂)及重投影误差,撰写实验报告。
- 参考资源:http://www.vision.caltech.edu/bouguetj/calib_doc/htmls/example.html
关键问题
张正友标定法相比传统线性标定法,核心优势是什么?这些优势使其适用于哪些场景?
张正友标定法相比传统线性标定法,核心优势体现在灵活性、成本、鲁棒性三个维度,具体如下:
- 灵活性更高 :传统线性标定需高精度3D标定rig(如多控制点的立体标定板),且需固定相机/标定物;张正友方法仅需平面模板(可打印),相机或模板可手动机动,无需精密设备,适配更多场景;
- 成本更低:传统方法的3D标定rig价格昂贵,张正友方法的模板可自行打印,硬件成本几乎为零;
- 鲁棒性更强 :传统线性标定易受噪声影响(仅线性求解,无优化);张正友方法通过非线性最大似然估计(Levenberg-Marquardt)优化参数,且引入径向畸变修正,降低噪声干扰,重投影误差可控制在0.3像素左右。
适用场景:桌面视觉系统(DVS),如工业零件检测、机器人手眼协调、AR/VR设备标定、低成本视觉项目(无精密标定设备)等。
张正友标定法中,内参约束条件(h1TBh2=0h_1^T B h_2=0h1TBh2=0、h1TBh1=h2TBh2h_1^T B h_1 = h_2^T B h_2h1TBh1=h2TBh2)是如何基于旋转矩阵的特性推导而来的?
内参约束的推导核心是旋转矩阵的正交性 (riTrj=δijr_i^T r_j=\delta_{ij}riTrj=δij,δ为克罗内克函数,i,j=1,2),具体步骤如下:
-
单应与内外参的关系 :
平面模板的单应矩阵H满足H=λAr1,r2,tH=\lambda Ar_1,r_2,tH=λAr1,r2,t(λ为尺度因子,A为内参矩阵,r₁,r₂为旋转矩阵R的前两列,t为平移向量),因此H的前两列可表示为h1=λAr1h_1=\lambda A r_1h1=λAr1、h2=λAr2h_2=\lambda A r_2h2=λAr2。
-
利用旋转矩阵的正交性:
- 正交性1:r1Tr2=0r_1^T r_2=0r1Tr2=0(r₁与r₂垂直):
对h1=λAr1h_1=\lambda A r_1h1=λAr1、h2=λAr2h_2=\lambda A r_2h2=λAr2两边左乘A−1A^{-1}A−1,得r1=1λA−1h1r_1=\frac{1}{\lambda} A^{-1} h_1r1=λ1A−1h1、r2=1λA−1h2r_2=\frac{1}{\lambda} A^{-1} h_2r2=λ1A−1h2;
代入r1Tr2=0r_1^T r_2=0r1Tr2=0,得(A−1h1)T(A−1h2)=0(A^{-1} h_1)^T (A^{-1} h_2)=0(A−1h1)T(A−1h2)=0,即h1T(A−TA−1)h2=0h_1^T (A^{-T} A^{-1}) h_2=0h1T(A−TA−1)h2=0;
因定义B=A−TA−1B=A^{-T} A^{-1}B=A−TA−1,故约束1为h1TBh2=0h_1^T B h_2=0h1TBh2=0。 - 正交性2:r1Tr1=r2Tr2=1r_1^T r_1=r_2^T r_2=1r1Tr1=r2Tr2=1(r₁与r₂模长均为1):
同理,代入r1Tr1=1r_1^T r_1=1r1Tr1=1得(A−1h1)T(A−1h1)=(λ)−2(A^{-1} h_1)^T (A^{-1} h_1)=(\lambda)^{-2}(A−1h1)T(A−1h1)=(λ)−2,代入r2Tr2=1r_2^T r_2=1r2Tr2=1得(A−1h2)T(A−1h2)=(λ)−2(A^{-1} h_2)^T (A^{-1} h_2)=(\lambda)^{-2}(A−1h2)T(A−1h2)=(λ)−2;
两式相等,即h1T(A−TA−1)h1=h2T(A−TA−1)h2h_1^T (A^{-T} A^{-1}) h_1 = h_2^T (A^{-T} A^{-1}) h_2h1T(A−TA−1)h1=h2T(A−TA−1)h2,故约束2为h1TBh1=h2TBh2h_1^T B h_1 = h_2^T B h_2h1TBh1=h2TBh2。
- 正交性1:r1Tr2=0r_1^T r_2=0r1Tr2=0(r₁与r₂垂直):
-
约束的作用 :
每幅图像提供2个约束,n幅图像提供2n个约束,通过求解Vb=0Vb=0Vb=0(b为B的6个独立参数),可从单应矩阵中分离出内参(A),避免传统方法需多组3D点的局限。
使用OpenCV和Matlab相机标定工具箱进行标定时,核心操作步骤有哪些?如何对比两种方法的标定结果?
OpenCV标定核心步骤
- 准备工作 :
- 采集至少10幅不同角度的棋盘格图像(确保棋盘格覆盖全视场);
- 定义3D模板点(如棋盘格方格尺寸30mm,设Z=0,生成objPoints=X,Y,0objPoints=X,Y,0objPoints=X,Y,0)。
- 角点检测 :
- 对每幅图像,用
cv2.findChessboardCorners(image, patternSize, corners)检测棋盘格内角点(如patternSize=(9,6)表示9列6行角点); - 用
cv2.cornerSubPix亚像素优化角点坐标,提高精度。
- 对每幅图像,用
- 相机标定 :
- 调用
cv2.calibrateCamera(objPoints, imgPoints, imgSize, camMatrix, distCoeffs, rvecs, tvecs):objPoints:3D模板点列表;imgPoints:2D图像角点列表;imgSize:图像分辨率;- 输出:
camMatrix(内参矩阵)、distCoeffs(畸变系数,如k₁,k₂,p₁,p₂,k₃)、rvecs(旋转向量)、tvecs(平移向量)。
- 调用
- 结果验证 :
- 用
cv2.projectPoints将3D模板点投影到图像,计算投影点与实际角点的欧氏距离,得到重投影误差。
- 用
Matlab工具箱标定核心步骤
- 工具箱配置 :
- 图像读取 :
- 点击"Image names",输入图像basename(如"chess")和格式(如"jpg"),加载所有标定图像。
- 角点提取 :
- 点击"Extract grid corners",选择所有图像,手动点击棋盘格4个对角点确定模板范围;
- 输入方格尺寸(如30mm),工具箱自动提取亚像素角点。
- 标定与优化 :
- 点击"Calibration",工具箱先计算解析解,再通过非线性优化得到最终内参、畸变系数、外参;
- 点击"Show calib results"查看内参矩阵、畸变系数、重投影误差(彩色编码图)。
结果对比维度
| 对比维度 | 对比方法 |
|---|---|
| 内参矩阵(A) | 对比α(fx)、β(fy)、u₀、v₀、γ的数值差异(如计算绝对误差 |
| 畸变系数 | 对比k₁、k₂(径向畸变)、p₁、p₂(切向畸变)的差异,评估一致性 |
| 重投影误差 | 对比两种方法的平均重投影误差(如OpenCV误差0.35像素,Matlab误差0.33像素),误差越小精度越高 |
| 外参一致性 | 对同一幅图像,对比OpenCV的rvecs/tvecs与Matlab的外参(旋转矩阵/平移向量),通过SVD验证旋转矩阵正交性 |
| 去畸变效果 | 用两种方法的内参和畸变系数,调用cv2.undistort(OpenCV)和undistort(Matlab)对同一幅畸变图像去畸变,目视对比去畸变后的图像清晰度与边缘一致性 |