本文核心在于阐明构成自动驾驶车辆各项技术的发展现状。自动驾驶技术划分为感知模块(深入剖析摄像头、激光雷达、毫米波雷达、超声波传感器及新兴成像雷达技术的最新进展)、决策与学习模块以及边缘计算模块(重点探讨包含先进AI算法、自然语言处理、机器学习技术的动态格局,以及边缘计算的变革性影响)。这篇文章主要介绍感知模块。
传感技术
在自动驾驶车辆(AV)技术的前沿,多种先进传感模式的融合构成了车辆自主性的基石。这种融合的核心在于高清摄像头与一系列多样化传感器(包括超声波传感器、激光雷达和毫米波雷达)的集成。这种被称为"传感器融合"的技术,代表了当前为车辆赋予实现完全自动驾驶所需感知能力的最高成就。
高清摄像头以其敏锐的视觉分辨率和色彩辨别能力而至关重要,在这感知交响曲中扮演着不可或缺的角色。它们在解读复杂视觉刺激方面表现出色------从交通信号灯细微的色彩变化到道路标志的复杂图案。然而,摄像头的强大能力也并非没有致命弱点;在夜幕笼罩或恶劣天气条件下,其性能会减弱。正是在这些短板之处,传感器融合的协调变得至关重要。
在传感器集成的前沿,超声波传感器与激光雷达和毫米波雷达的结合,正在解决以往独立系统的缺陷。这种集成对于克服近距离探测的挑战尤为关键------这是传统激光雷达传感器常常表现不佳的领域。这种精确的近距感知对于执行复杂的停车操作和在狭窄空间中准确无误地导航至关重要。
超声波传感器与激光雷达之间的协作动态构建了一个更强大的解释框架。虽然激光雷达能提供车辆周围环境的详细地形图,但它偶尔容易产生误判,尤其是在存在反射表面或非典型物体轮廓的情况下。此时,超声波传感器提供了更深层次的空间感知,验证并优化激光雷达的数据,从而降低了物体识别错误的风险。
将这种协同作用进一步延伸,超声波传感器与毫米波雷达技术的融合,预示着感知系统新时代的到来,该系统能够兼顾短距和长距探测。毫米波雷达因其更宽的波型,在近距离场景中常常难以实现精确定位。超声波技术巧妙地填补了这一空白,赋予自动驾驶车辆更强的态势感知能力------这一特性在需要远近感知和谐结合的场景(例如在高速公路上行驶穿插复杂停车序列)中至关重要。
在这一前沿领域,汽车制造商并非仅仅在传感器技术之间做选择;相反,他们正在战略性地协调多种激光雷达变体,每种变体都为自动驾驶车辆的集体感知智能贡献其独特优势。选择特定的激光雷达型号不再仅仅是技术选择,而是受多种因素影响的战略决策,这些因素包括特定应用需求、成本效益分析以及技术创新的不断推进。
本章旨在深入探讨自动驾驶车辆中复杂精密的传感与视觉技术世界。本节涵盖摄像头及人工智能增强视觉技术。
摄像头与视觉系统
摄像头在自动驾驶车辆中占据基础性且技术复杂的位置,作为主要传感器为感知和导航系统提供至关重要的视觉数据。它们的作用远不止于图像捕捉,还包含复杂的计算机视觉处理过程,以像素级精度解读周围环境。摄像头在关键任务中发挥着重要作用,包括实时车道检测、物体识别和复杂的深度感知,这使得它们对于自动驾驶车辆的安全性和运行效率不可或缺。
在过去三年中,高分辨率摄像头取得了显著进步,其捕捉精细细节的能力显著提升。这反过来使自动驾驶车辆能够更准确地识别周围物体,从而变得更加可靠和安全。因此,在本节中,我们将探讨过去三年中对自动驾驶车辆发展产生影响的视觉技术进展。
3D立体视觉
3D立体视觉技术利用两个摄像头来确定环境中物体的深度和精确位置。这类似于人类利用双目视觉进行深度感知的方式。通过使自动驾驶车辆比单摄像头更安全地行驶,该技术成为其未来不可或缺的一部分。
该技术在过去十年中发展迅速,一些公司取得了重大进展,使汽车制造商能够通过软件解决方案快速且低成本地将3D立体视觉添加到现有的高级驾驶辅助系统(ADAS)中。
摄像头在车辆中的定位是行业内持续讨论的话题。间隔较宽的摄像头在受到底盘温度变化或道路振动影响时,有可能发生错位------当摄像头需要保持在百分之一度内的对准精度时,这是一个问题。
主要参与者,如斯巴鲁的EyeSight和梅赛德斯EQS中的Drive Pilot系统,采用部署更紧凑的立体视觉系统来避免此问题------这些系统与毫米波雷达协同工作。立体视觉是一项不断发展的技术,研究人员和开发者正在探索提高其精度、效率和视野范围的新方法。
最大的影响可能来自于用于处理遮挡和校准问题的深度学习和神经网络。其他有趣的研究领域包括主动立体视觉,该技术被用于将图案或信号投射到场景中,以创建人工纹理和对比度。
一些此类前沿研究正在由大学团队在赛道上进行测试。例如,使用Nerian的SceneScan Pro和Karmin3立体摄像头为自动驾驶汽车创建3D立体视觉系统。

热成像摄像头
21世纪初,通用汽车、宝马和本田等多家知名汽车制造商率先引入被动式热成像摄像头,以提升夜间行车安全。这些创新性的热成像摄像头旨在应对光线昏暗或有雾区域动物碰撞和行人事故风险,其首要目的是为人类驾驶员提供宝贵的辅助。
然而,随着DARPA无人驾驶挑战赛的到来,自动驾驶的格局开始发生显著变化。该赛事引发了人们对各种传感技术的浓厚兴趣和大量投资。其中,激光雷达脱颖而出,吸引了绝大部分的关注和资金。它与雷达和可见光摄像头一起,被广泛认为是实现更高级别自动驾驶的最佳感知组合。
为了增强传感器能力,一些公司正将热成像摄像头纳入其传感器组合,因为它们认识到热成像技术在弥补激光雷达、雷达和可见光摄像头的不足方面具有独特优势。这种额外的传感模式被证明在应对特定挑战时极具价值,例如在弱光或雾、烟、蒸汽等重度遮蔽环境下识别动物和行人。
行人在天黑后与道路车辆发生事故的风险最高。行人死亡事故发生在黑暗环境中的比例(75%)远高于白天(21%)、黄昏(2%)和黎明(2%)。

值得注意的是,Waymo Via 和 Plus.ai 等先驱企业已利用热成像摄像头提升卡车在高速公路等场景的自动驾驶能力。这一举措显著增强了长途运输的安全性与效率。
Nuro、Cruise 和 Zoox 等公司则将热成像摄像头纳入其专用车辆的传感器组合,这些车辆专为高密度城市区域的复杂路况而设计。此类车辆不仅彻底改变了最后一英里的食品杂货配送模式,也为网约车服务提供了创新思路。通过战略性地部署热成像摄像头,这些企业大幅提升了其在城市环境中运营的安全性与效能。
人工智能增强视觉的赋能
传统摄像头捕获原始视觉数据后,需经后续处理与解读才能获取有意义的环境信息。人工智能算法(尤其是深度学习模型)通过使摄像头能够解读周围视觉信息并增强图像理解能力,实现了这一过程的革命性变革。
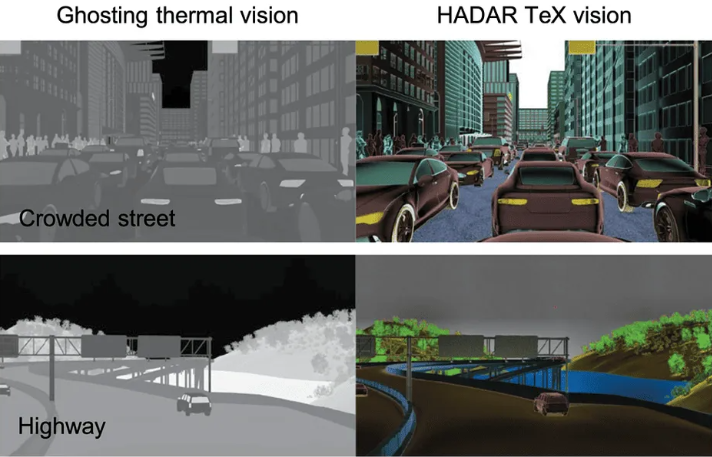
AI增强视觉的集成是一项突破性进展,显著提升了自动驾驶车辆摄像头系统的能力。例如,由普渡大学和密歇根州立大学研究人员开发的HADAR(一种AI驱动的热成像系统),可通过解读热签名生成清晰的热图像。它有效解决了传统热成像中常见的模糊"重影"问题,极大改善了自动驾驶车辆与机器人的感知能力。
此外,Omniq近期推出了面向自动驾驶车辆的人脸检测功能,通过面部识别预防犯罪以提升安全性。其AI采用神经网络算法进行智能决策,已在全球完成逾两万次安装。SemiDrive与瞰瞰科技正携手改进车载成像系统:SemiDrive的X9芯片为系统提供算力,瞰瞰科技则提供全流程开发服务。
瞰瞰科技在高清舱内摄像头领域拥有专业技术,并开发出可替代传统后视镜的摄像头方案。该公司还推出了用于车辆接入的掌静脉生物识别技术。该系统的红外摄像头不受光线变化影响,采用YOLO v7算法实现实时人脸检测,并通过分析面部表情与头部朝向保障安全,计划在全面测试后投入商用市场。
在卷积神经网络(CNN)与配套机器学习分类技术的赋能下,摄像头使自动驾驶视觉系统能精准识别和分类物体、行人、路标与车道线。这种认知水平提升了车辆在复杂动态交通场景中的决策能力。
AI增强视觉对自动驾驶车辆至关重要,其应用涵盖物体识别、运动追踪与分类等任务。该技术显著增强了车辆对周边环境的理解,从而使决策过程更智能、更安全。
RIKEN在2023年的研究生动展示了AI增强视觉的潜力。其创新方法受人类大脑记忆形成机制启发,通过刻意降低高分辨率图像质量来训练自监督学习算法。这种方法提升了算法在低分辨率图像中识别物体的能力,解决了计算机视觉领域的一个显著难题。
此外,普渡大学与密歇根州立大学的研究人员推出了革命性的AI增强相机成像系统HADAR(热辅助探测与测距)。该系统利用AI解读热签名,有效解决了热成像常见的"重影"等问题。其应用范围广泛,从提升自动驾驶车辆与机器人感知能力,到实现公共活动的非接触式安检,均展现出巨大潜力。
另一个案例来自NVIDIA,该公司开发了一种采用单一深度神经网络(DNN)的像素级分割方法,以实现全面的场景理解。该技术能将场景划分为不同的物体类别,并识别出这些类别中的不同实例。
此项技术的好处影响深远,包括减少训练数据需求、改进感知能力以及支持自动驾驶车辆的安全运行。总体而言,这些创新凸显了AI增强视觉在塑造自动驾驶车辆及相关技术未来方面的变革潜力。
"我们拥有用于识别车道的算法,同时也有物体检测算法,此外还有一个我们称之为'自由空间'的DNN,它用于探测没有物体的区域。" --- Danny Shapiro, NVIDIA汽车事业部副总裁。
开发自动驾驶视觉系统的知名公司
本节重点介绍当前推动自动驾驶汽车发展的一些前沿视觉系统。
Mobileye
Mobileye在其基于视觉的驾驶辅助系统中使用多种摄像头,包括鱼眼摄像头、广角摄像头和热成像摄像头。2023年,Mobileye推出了首款符合欧盟新标准的基于摄像头的智能速度辅助系统。这项仅使用摄像头的技术已在整个欧洲获得官方批准,成为同类首创。Mobileye的技术能够识别各种交通标志,仅凭摄像头即可辅助智能速度辅助系统。它依托于Mobileye拥有的400PB全球驾驶影像数据库,能够快速满足日益提高的汽车安全标准。
大陆集团
大陆集团开发各种摄像头,包括鱼眼、广角和热成像摄像头。这些摄像头旨在满足不同自动驾驶应用场景的特定要求。更具体地说,其环视摄像头采用鱼眼光学设计以获取短距视野,并支持以太网或LVDS通信。
2022年11月,大陆集团与Ambarella展开合作,共同开发基于人工智能的辅助驾驶和自动驾驶软硬件解决方案。该合作旨在到2026年为全球量产提供产品,以满足市场对辅助驾驶和自动驾驶技术日益增长的需求。合作重点包括用于高级驾驶辅助系统的基于摄像头的感知解决方案,以及适用于L2+及以上级别自动驾驶车辆的可扩展全栈系统。
TIER IV
TIER IV 是一家开源自动驾驶技术公司,基于其2022年推出的 Automotive HDR Camera C1 所获得的巨大市场关注,正在扩大生产。
该摄像头专为自动出行应用而设计,并已在自动驾驶、驾驶员辅助、自主移动机器人、安防和监控等多个领域获得广泛应用。这得益于其令人印象深刻的120dB高动态范围和高质量的汽车级硬件。
全球已有超过100家公司采用了C1摄像头。基于C1的成功,TIER IV于2023年6月推出了C2摄像头,这是一款更先进的型号,分辨率提升一倍至540万像素,增强了其在远距离物体和信号识别方面的能力。最后,TIER IV正在开发配备800万像素图像传感器的C3摄像头,以满足高速公路驾驶等高速应用的需求。目标是在年内完成开发,并于2024年初开始供货。
华为
华为是一家全球领先的ICT(信息与通信)解决方案提供商,其自动驾驶技术以"乾崑智驾"(Advanced Driving System, ADS)为核心,通过全栈自研的"芯-硬-软-云"协同体系,致力于实现高阶智能驾驶的规模化落地。
华为自2015年开始探索自动驾驶技术,并于2022年推出首个无需高精地图的城区NCA(导航辅助驾驶)功能ADS 1.0系统。该系统采用多传感器融合方案,结合激光雷达、毫米波雷达和摄像头等,实现全场景环境感知。2024年,华为推出ADS 3.0,引入端到端大模型,显著提升决策效率和平顺性。截至2025年,其乾崑智驾系统搭载车辆已突破100万辆,覆盖从15万至百万级价格区间的多种车型。
在硬件方面,华为自研高精度固态激光雷达,探测距离达500米,最小感知精度为3厘米,并配合4D成像雷达实现全方位环境建模。其MDC(移动数据中心)计算平台提供最高352 TOPS的算力,支持L2+至L5级别的自动驾驶需求,并满足车规级功能安全标准。
软件层面,华为ADS 3.0及更高版本的ADS 4.0创新性地采用WEWA架构,通过端到端大模型融合感知、预测、决策与规划模块,使端到端时延降低50%,通行效率提升20%。其GOD(通用障碍物识别)网络能够识别包括异形障碍物在内的多种目标,识别率高达99.9%。华为还构建了大规模数据闭环系统,依托盘古大模型和云端仿真平台,日虚拟训练里程超千万公里,持续优化算法。
功能上,华为乾崑智驾支持"车位到车位"的全场景智能驾驶,涵盖高速与城区NCA、智能泊车VPD等功能。其全向防碰撞系统CAS累计已避免数百万次潜在碰撞。华为通过多种合作模式(零部件、HI模式、鸿蒙智行)与车企协同,并推出ADS SE等版本降低高阶智驾的体验门槛,推动智能驾驶技术的普惠化。
激光雷达
激光雷达传感器帮助自动驾驶车辆感知和理解周围环境。它们利用激光脉冲探测物体并测量反射光返回的时间,通过编译这些数据来创建周围环境的3D地图。这些信息随后与其他数据相结合,以确保安全导航。
当前激光雷达研究的一个核心领域是开发能够结合不同激光雷达技术优势的系统,以提升整体感知性能。例如,将脉冲激光雷达与FMCW激光雷达配对,可提供全面的物体检测、精确的距离测量和实时的速度估算。
一种混合激光雷达设置可以集成一个用于短距离探测的固态激光器,以及一个专为捕获远距离测量而优化的FMCW激光器。将激光雷达与摄像头、雷达等其他传感器集成,可创建一个能够解决传感器冗余和数据空白的传感器融合生态系统,最终提高自动驾驶系统的鲁棒性和可靠性。
激光雷达产品概览
固态激光雷达
固态激光雷达系统使用非移动光学组件来控制激光束,这使其非常适合自动驾驶汽车的严格要求。自2018年推出以来,固态激光雷达可将传感器探测范围增强至200米以上,同时降低成本十倍以上。与使用移动部件控制光束的传统激光雷达相比,它们提供了一个有前景的优势。这些移动部件的组装和校准成本高昂,并且对其长期可靠性存在显著担忧。
预计在2021-2026年的预测期内,对固态激光雷达的需求将以30.66%的复合年增长率增长。这种增长潜力反映在该领域的大量研究中,包括基于纳米光子的激光雷达传感器这一新兴领域。
像Velodyne(现Velodyne + Ouster)这样的汽车品牌以及像Luminar和Xenomatix这样的科技公司正在推进固态激光雷达的研究。随着梅赛德斯-奔驰等原始设备制造商在固态激光雷达领域建立更深入的合作关系。
调频连续波激光雷达
调频连续波激光雷达通过发射频率调制的连续激光信号来工作,从而能够同时测量距离和速度。这种实时能力对于自动驾驶汽车准确评估动态环境至关重要。FMCW激光雷达的连续波形提供了更高的分辨率,能够实现细粒度的物体检测和跟踪。
尽管存在信号处理复杂性,但该领域的研究进展迅速,有望提升自动驾驶汽车的感知能力。它已被公认为激光雷达技术的一项变革性进步。Aeva、Mobileye和Blickfeld等先驱公司已投入多年时间开发光子集成电路和FMCW传感器,有望彻底改变自动驾驶的格局。
为自动驾驶汽车开发激光雷达技术的公司
在本节中,我们将更深入地了解处于自动驾驶汽车激光雷达技术发展前沿的公司。
Velodyne
Velodyne 是为自动驾驶汽车开发激光雷达传感器的重要供应商。它是第一家上市的激光雷达公司。该公司通过与其客户密切合作,基于一组通用的真实场景和相关极端案例测试其激光雷达传感器,从而在汽车行业确立地位。2023年2月,Velodyne与Ouster合并。Waymo、Uber和Cruise等自动驾驶行业的巨头均使用Velodyne的激光雷达传感器。
Luminar Technologies
Luminar Technologies 主要开发基于视觉的激光雷达和机器感知技术,主要用于自动驾驶汽车。2023年2月,Luminar推出了Iris Plus激光雷达传感器,该传感器设计用于与量产车辆的屋顶线完美融合。它使用比通常波长更长的1550纳米激光(而非常见的905纳米)。这一特性提高了设备探测小而低反射率物体的能力,包括深色汽车、动物或突然跑到街上的儿童。其工作距离超过250米,对于更大、反射性更强的物体可达500米。Aeva Technologies
Aeva Technologies 是激光雷达传感器领域的先驱,其产品兼具可见光和红外光谱探测能力。Uber和大陆集团等公司均采用了Aeva的技术。2022年,Aeva发布了革命性的4D激光雷达技术Aeries II,该技术采用FMCW4D技术和芯片级激光雷达硅光子设计。Aeries II结构紧凑、可配置且符合车规级标准,设计用于在各种条件下保持可靠性。
其超远距物体检测和跟踪能力可达500米,在探测对向来车、行人和动物方面表现突出。此外,Aeva的FMCW技术不受阳光或其他激光雷达传感器干扰的影响,其芯片级激光雷达设计使得大规模生产成为可能,适用于广泛的自动驾驶应用。
Quanergy Systems
自2022年以来,Quanergy正以其实时3D激光雷达解决方案变革物理安防领域,该领域在增强驾驶态势感知和安全方面扮演着关键角色。该公司是提供3D激光雷达安防解决方案的先驱,为动态环境带来智能和主动的感知能力。Quanergy旨在使用户能够超越当前的传感限制,提供为3D世界量身定制的3D安防体验。丰田和吉利等公司已将Quanergy的传感器集成到其自动驾驶产品中。
英特尔与Mobileye
自2020年起,英特尔和Mobileye特别关注利用光子集成电路和FMCW激光雷达等技术来提升自动驾驶汽车激光雷达和雷达传感器的性能。他们专注于激光雷达-雷达混合解决方案,旨在充分利用两种技术的优势。所提出的架构涉及集成摄像头、激光雷达和雷达以覆盖完整视场,目标是克服传统传感器中的旁瓣和探测范围有限等挑战。两家公司的合作旨在使雷达和激光雷达变得更好、更便宜,以便更快实现L5级自动驾驶。他们的新产品系列预计于2025年推出。
大陆集团
大陆集团的高分辨率3D闪光激光雷达技术标志着车辆视觉领域的重大进展。该激光雷达系统于2021年发布,拥有固态设计,确保持续无间断的数据流。其高分辨率能力涵盖垂直和水平维度,可提供详细的洞察。该系统还包括阻塞检测、集成加热器、可选清洗系统、自动对准和连续采样模式等功能。
Blickfeld
Blickfeld于2022年推出了Qb2智能激光雷达传感器,这是一种因其板载处理和Wi-Fi连接而易于部署的新型设备。这是首款内置软件的智能激光雷达传感器。Qb2激光雷达传感器将高性能探测和测距能力与板载软件相结合,无需开发任何复杂的定制软件即可提升性能和设置效率。
此外,该传感器内置Wi-Fi支持。Qb2采用定制的微机电系统镜进行光束控制,优化了分辨率、探测距离和视场之间的平衡,以创建多维地图。每帧可实现最多400条扫描线,确保点云数据具有卓越质量。Qb2传感器设计支持三次回波,并拥有0.25° x 0.25°的激光束散角,有助于进行细致扫描以获取精确、可靠的信息。
禾赛科技
禾赛科技提供多种激光雷达传感器,旨在满足L4级及以上自动驾驶的要求,确保可靠和安全运行。2023年8月1日,禾赛科技宣布与NVIDIA合作。该合作旨在将禾赛先进的激光雷达传感器集成到NVIDIA DRIVE和NVIDIA Omniverse平台中,为自动驾驶的突破性发展奠定基础。通过将禾赛专业的激光雷达技术与NVIDIA在人工智能、仿真和软件开发方面的专业知识相结合,此次合作有望推动自动驾驶领域的创新。
速腾聚创
速腾聚创提供基于芯片、激光雷达硬件和感知软件这三项基础技术的多种智能激光雷达感知系统解决方案。2016年,速腾聚创开始研发机械式激光雷达,即R平台。到2017年,他们推出了感知软件和M平台。2021年,速腾聚创实现M1的量产启动,成为全球首家量产车规级且采用自研芯片的激光雷达公司。2022年,为完善汽车激光雷达领域的M平台产品系列,速腾聚创推出了E平台,一种盲区固态激光雷达。采用速腾聚创解决方案的主机厂包括比亚迪、广汽传祺、上汽集团、吉利、一汽、丰田、北汽集团等众多企业。
雷达
在高级驾驶辅助系统中,通常结合使用多种类型的雷达以实现最佳性能。长距雷达擅长探测250米外的物体。中距雷达在1-60米半径范围内有效工作,而短距雷达最佳工作范围为1-30米,辅助完成盲点检测和泊车辅助等任务。雷达传感器通常布置在车辆的每一侧,包括前、后和侧面。自动驾驶汽车中的雷达工作在24 GHz、74 GHz、77 GHz和79 GHz频率。
在这些系统中,主要有两种雷达类型占主导地位:脉冲雷达 和调频连续波雷达。在脉冲雷达中,设备发射单个脉冲,且信号频率在整个操作过程中保持恒定。而在调频连续波雷达中,脉冲是持续发射的。
过去三年的研发着力于解决自动驾驶车辆如何导航、交互并适应不断变化的环境所面临的诸多挑战。相关研究亮点概述如下。
固态雷达
固态雷达传感器采用电子控制的组件,从而无需机械运动部件。这一进步有助于提高雷达传感器的可靠性、耐用性和使用寿命,使其能够适应自动驾驶汽车苛刻的运行条件。固态雷达结构也更紧凑,便于集成到自动驾驶车辆的设计中。此外,其更低的功耗和发热量对于维持自动驾驶汽车的能效至关重要。大陆集团、博世和Veoneer等公司正积极研究和应用该技术于自动驾驶汽车。向固态雷达的转变标志着在自动驾驶不断发展的格局中,正朝着更坚固耐用且成本更低的传感解决方案迈进。
4D雷达
4D雷达传感器基于调频连续波技术构建,并将时间作为第四维度。这种时序信息增强了自动驾驶汽车预测运动物体轨迹的能力,从而更全面地理解周围环境。Waymo、Aurora和Argo AI等自动驾驶公司正在探索使用4D雷达传感器来增强车辆的感知能力。需要强调的是,这些传感器的重要性会根据开发人员所采用的总体传感器融合策略而有所不同。
合成孔径雷达
合成孔径雷达代表了一种先进的雷达技术,为雷达传感器提供了高分辨率成像能力。它使自动驾驶汽车即使是在具有挑战性的天气条件或低能见度场景下,也能更好地感知和分析物体、障碍物及地形。
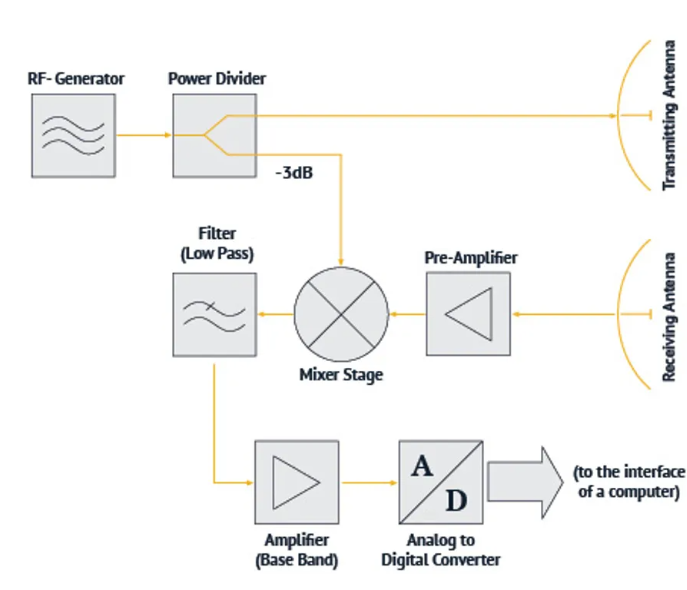
SAR通过合成车辆移动时从不同位置获取的多个雷达测量值来生成详细图像。这种方法创造了一个巨大的虚拟天线,从而实现了更精细的分辨率和改进的物体识别能力。SAR对于识别小物体、区分行人与静止障碍物,以及增强自动驾驶汽车在复杂场景下的感知能力尤其有价值。通过利用传感器自身的运动,它能创造出巨大的天线孔径,从而实现精确的角分辨率。鉴于传感器的位置,连续的雷达测量数据可以被处理,就好像是由一个大型天线阵列获取的一样。下图阐释了这一原理。
剑桥大学、大众汽车集团以及德国微波与光子学研究所近期的研究已证实,SAR成像有望在不久的将来成功并常规地用于城市环境的高分辨率测绘。
成像雷达
成像雷达是一种特定的雷达变体,能够构建周围环境的二维或三维图像。在2020年至2023年间,成像雷达技术取得了显著进步,效率更高、能力更强、应用范围也更广。
首先,现代成像雷达的分辨率和成像精度有了大幅提升。这一进展使得探测更小的物体和更精细的环境细节成为可能,通过改进对行人、骑车人和障碍物的识别,显著增强了安全性。
其次,成像雷达通过融入多功能模式扩展了其能力,包括具备天气穿透能力的雷达模式。这些模式使雷达即使在大雨、大雪或大雾等具有挑战性的天气条件下也能有效运行。
此外,成像雷达越来越多地与激光雷达、摄像头和超声波传感器等互补传感器集成,以提高感知精度。这种传感器融合方法有助于全面了解周围环境,并在传感器故障时提供冗余备份。
最后,成像雷达受益于信号处理算法的进步,这些算法现在能够滤除噪声、区分不同物体类型并预测被探测实体的行为。这些进步对自动驾驶汽车控制系统做出更优决策贡献显著,从而提升了整体安全性和性能。
4D成像雷达
传统的成像雷达系统构建的是周围环境的二维或三维图像,而4D成像雷达则利用回声定位和飞行时间原理来创建周围环境的三维表征,并以时间作为第四维度。该技术还能提供接近或远离车辆的速度信息。这类雷达已成功解决了传统雷达面临的主要分辨率挑战------其分辨率远低于摄像头和激光雷达。
4D成像雷达擅长在垂直和水平方向上探测物体,能够实现高分辨率的物体分类。这一进步增强了雷达系统独立确定车辆位置的能力。4D成像雷达尚未成为所有整车制造商广泛采用的标准,但这是一个有前景的趋势。汽车制造商对雷达技术的采用情况各不相同,我们将在后续的"技术栈"章节中谈及。
毫米波雷达
来自美国和日本的研究表明,毫米波雷达在自动驾驶汽车中的应用潜力远不止于当前在泊车辅助方面的应用。毫米波雷达为激光雷达、摄像头和光学传感器提供了一种经济高效的替代方案,这主要是因为它仅由集成电路和印刷天线构成,降低了总体成本。此外,这类雷达在雾、雨等摄像头系统可能失效的恶劣天气条件下表现出更优越的性能。它同样擅长探测非视距目标,例如弯道上的目标,这使其在复杂驾驶场景中成为更可靠的选择。华为、大陆集团、采埃孚、博世、海拉、安波福、电装、日本电产艾莱斯、法雷奥、Veoneer和日立等公司都在开发用于高级别自动驾驶汽车的毫米波雷达。
开发自动驾驶雷达技术的公司
下文概述了在专门为自动驾驶汽车开发尖端雷达技术方面处于领先地位的公司。
NVIDIA NVRadarNet
NVIDIA的NVRadarNet通过引入深度神经网络方法,增强了用于物体检测的传统雷达处理方法。虽然经典雷达处理能有效识别运动车辆,但在处理静止物体时存在困难,经常产生误分类。该解决方案涉及使用雷达传感器数据训练一个DNN,使其能够检测运动和静止物体,并区分各种静止障碍物。
为解决雷达数据稀疏的问题,研究人员从相应的激光雷达数据集中转移了真实值标签,这使得DNN不仅能学习物体检测,还能学习物体的3D形状、尺寸和方向。将雷达DNN与经典雷达处理相集成,改善了对障碍物的感知能力,有助于自动驾驶汽车做出更好的驾驶决策,即使在复杂场景下也是如此,并为基于摄像头的障碍物检测提供了冗余备份。
"深度神经网络正变得越来越复杂。我们不仅有能力检测到行人,还能检测到分心的行人。" --- Danny Shapiro, NVIDIA汽车事业部副总裁
Navtech雷达
Navtech雷达为自动驾驶汽车提供稳健的传感器解决方案,确保在其他传感器可能失效的恶劣条件下依然保持性能。这种高分辨率、360度、长距离雷达在恶劣天气和环境挑战中表现出色,能提供广泛而精确的周围环境视图。
2021年,厄勒布鲁大学选择将该技术作为一项关键传感器,用于开创性的自动驾驶研究,特别专注于能在灰尘、污垢以及环境能见度低等最严苛条件下无误运行。该雷达的应用延伸至测试路线以及对自动驾驶车辆和常规车辆的行为分析,进一步巩固了其在推进自动驾驶技术方面的作用。
NXP
2023年1月,NXP发布了业界首款用于下一代自动驾驶系统的28nm RFCMOS雷达单芯片IC系列,能够实现物体的远距离检测,并区分紧邻大物体的小物体。该技术提供更快的信号处理速度,使车辆能够实现4D成像雷达功能,尤其适用于L2+及更高级别的自动化。这些发展为原始设备制造商将先进雷达系统集成到其车辆中提供了一种成本效益高的解决方案。除了雷达处理器和收发器,NXP还提供关键外围器件,包括安全电源管理和车载网络组件,以创建完整的雷达节点系统。
Vayyar
2021年,Vayyar开发了一个可用于量产的车规级雷达单芯片平台。该平台提供一颗多功能芯片,能够替代多个传统的单一功能传感器,降低了舱内和自动驾驶应用的复杂性。该RoC具备多达48个收发器、一个内部DSP和一个MCU,用于实时信号处理,提供全天候有效性以及穿透物体的能力。
这种单芯片解决方案可替代十几种传感器,无需昂贵的激光雷达和摄像头。Vayyar的RoC应用范围广泛,从入侵者警报到增强型安全带提醒,满足了现代车辆日益增长的传感器密度需求,同时提供毫不妥协的安全性。
超声波传感器
超声波传感器是一种电子设备,通过发射超声波测量目标物体的距离,并将反射声波转换为电信号。在自动驾驶汽车内部,它们最常用于构建智能泊车辅助系统,通过向车辆控制系统提供实时距离和物体检测信息,辅助车辆完成泊车操作。从创新角度看,超声波技术并非以频繁突破著称。然而,该领域最近有两项技术解决方案值得特别关注。
2023年,MEMS超声波传感器解决方案推出了一款智能舱内儿童存在检测系统,这对车辆中的儿童安全至关重要。它利用多种传感器检测车内的儿童并向驾驶员发出警报。该MEMS超声波传感器模块尺寸紧凑,为30 x 20 x 5毫米,显著小于开放式超声波模块和毫米波雷达模块。
这种MEMS超声波儿童存在检测解决方案的探测距离超过1米,视场角达180°(±90°),确保了对舱内所有位置进行全面覆盖和精确监控。值得注意的是,最新的Euro NCAP标准表明,MEMS超声波传感因其高效的生命体征检测、广泛的感应范围、紧凑的尺寸和隐蔽的安装方式,可能主导儿童存在检测系统。NCAP现已将儿童存在检测纳入其测试标准。
同样在2023年,村田制作所推出了一款专为自动驾驶汽车设计的新型防水超声波传感器,型号为MA48CF15-7N。该传感器灵敏度高、响应速度快,并封装在密封外壳内以防液体侵蚀。随着汽车自动化程度提高,对用于探测物体的精确中短距离传感器的需求日益增长。MA48CF15-7N通过发射超声波并测量其返回时间来判断附近物体的存在和距离。该传感器可探测近至15厘米、远至550厘米的物体,覆盖角度为120°(水平)x 60°(垂直)的广阔区域。值得注意的是,该传感器在1kHz频率下的电容为1100pF±10%,确保持续性能稳定,无需频繁调整。其工作谐振频率为48.2±1.0kHz,品质因数为35±10,可在不同温度下提供可靠性能。这些规格明显比村田之前的型号更精确,变异度降低了50%,确保了不同单元间性能的一致性。