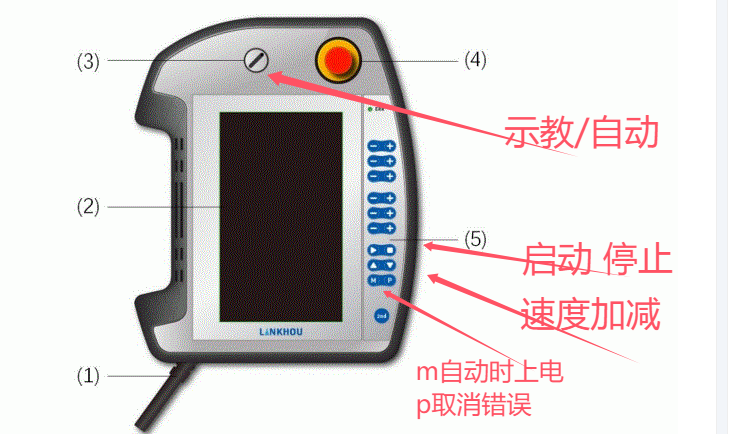
1.先打示教模式
2.按住刹车
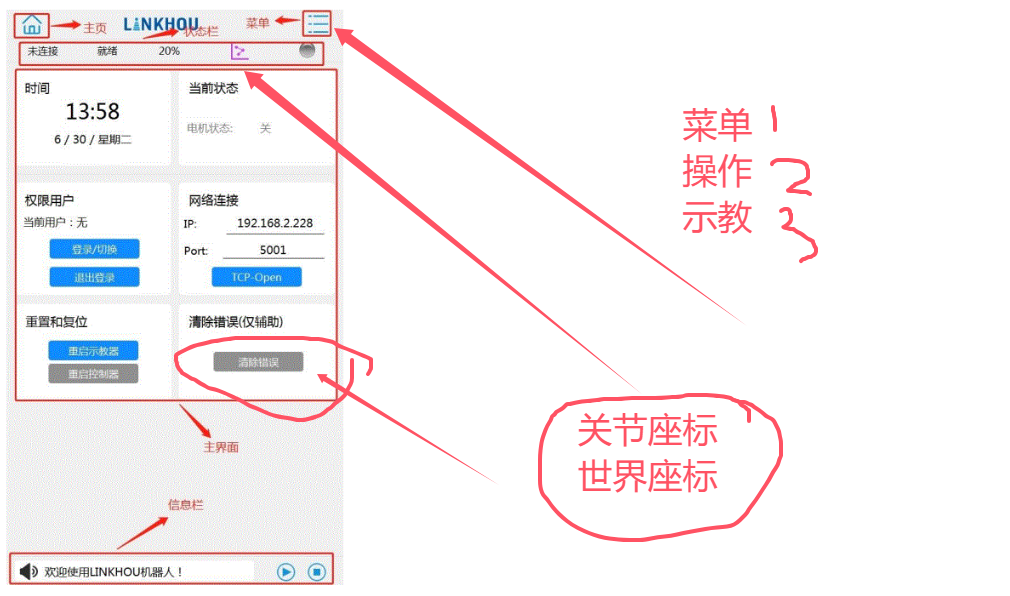
3.选择菜单 --- 操作--- 示教
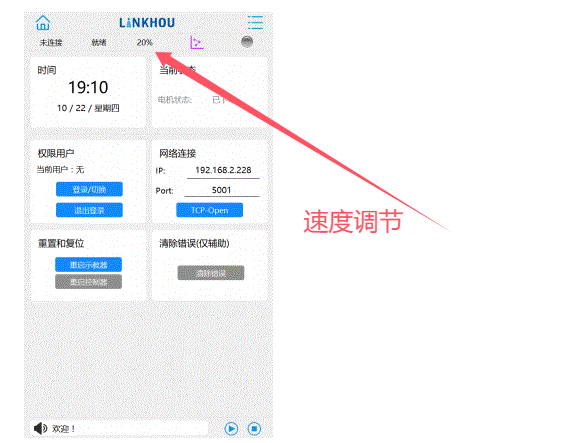
4.调节速度 选择合适的世界座标或者关节座标
5.选择对应轴加减即可
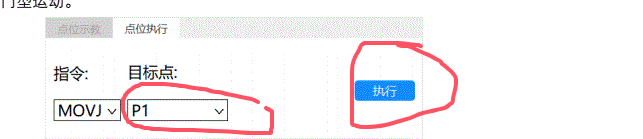
6.选择目标点位 点执行即可
7.若中途 会碰 松刹车即可
若关节超限 点P 取消错误
松产品
1.先打示教模式
2.按住刹车
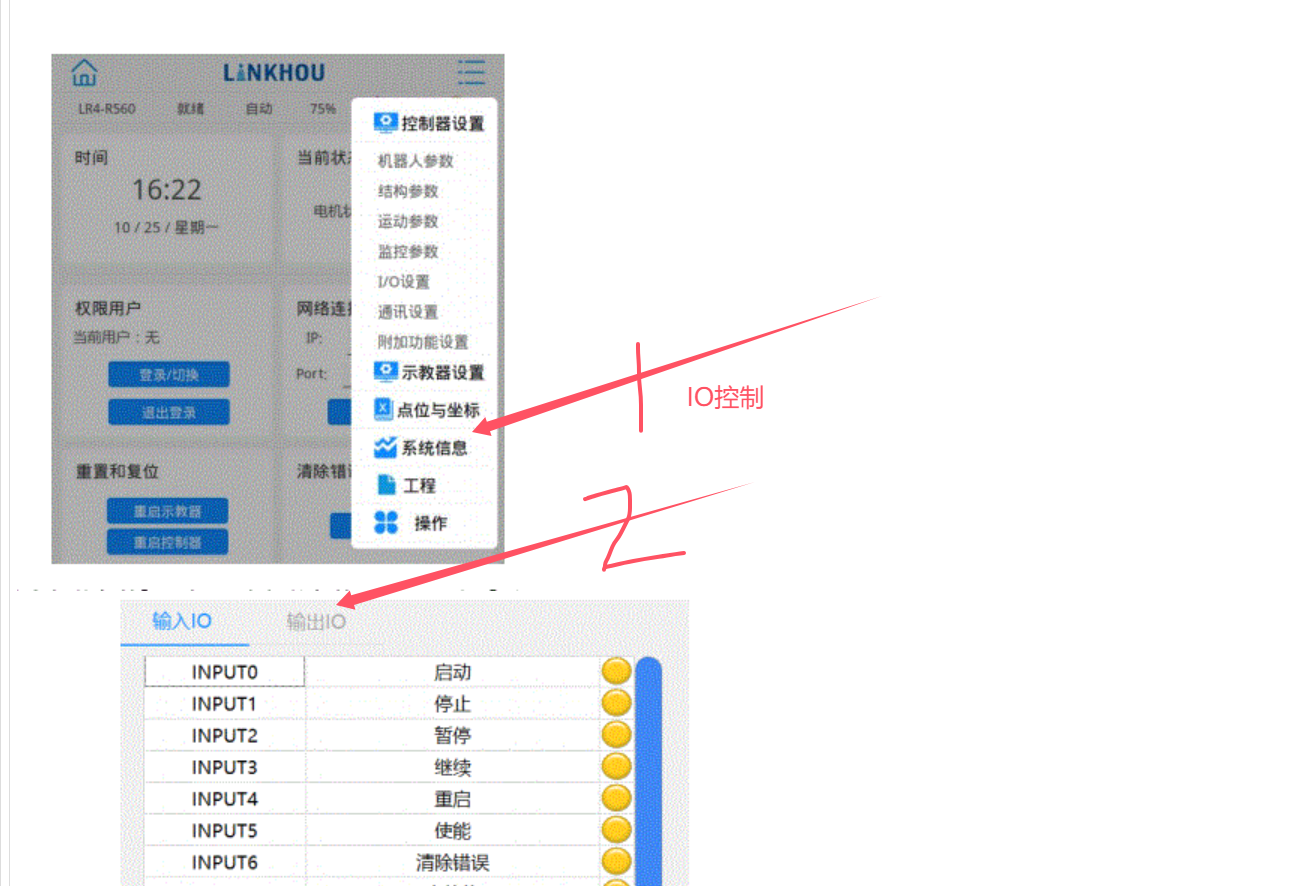
3.选择菜单
4.系统信息
5.IO控制

1.先打示教模式
2.按住刹车
3.选择菜单 --- 操作--- 示教
4.调节速度 选择合适的世界座标或者关节座标
5.选择对应轴加减即可
6.选择目标点位 点执行即可
7.若中途 会碰 松刹车即可
若关节超限 点P 取消错误
松产品
1.先打示教模式
2.按住刹车
3.选择菜单
4.系统信息
5.IO控制