摘要
伺服系统作为现代自动控制领域的核心技术,广泛应用于工业机器人、数控机床、航空航天等高精度控制场景。本文从控制专家的视角,深入解析伺服系统的基本原理、数学模型及控制策略。文章首先介绍伺服系统的定义与组成,然后详细阐述其控制原理,包括反馈机制和稳定性分析,并结合数学建模探讨经典和现代控制方法。通过LaTeX格式的数学表达,系统性地展示传递函数、状态空间模型等关键概念,旨在为读者提供一套完整的理论框架和实践指导。全文内容严谨、条理清晰,适合控制工程从业者和爱好者深入学习。
1. 引言
伺服系统是一种基于反馈控制的闭环系统,其核心目标是通过实时调整执行机构的输出,使被控对象(如电机或机械臂)精确跟踪给定的参考输入信号。伺服系统在工业自动化中扮演着关键角色,例如在机器人轨迹控制中,它能够确保位置和速度的准确响应,从而提高生产效率和产品质量。伺服系统的性能直接取决于其控制原理的设计,包括系统建模、控制器参数整定以及稳定性保障。本文将从基础概念出发,逐步深入探讨伺服系统的控制机制,并结合数学工具进行量化分析,帮助读者构建系统的理论体系。
伺服系统的发展可追溯到20世纪初,随着控制理论的进步,其应用范围不断扩展。在现代工业4.0背景下,伺服系统与人工智能、物联网技术的结合,进一步推动了智能控制的发展。本文不仅涵盖经典控制理论,还将简要介绍先进控制方法,以体现技术的演进。
2. 伺服系统概述
伺服系统(Servo System)是一种自动控制系统,通过反馈机制实现对位置、速度或力矩的精确控制。它通常由控制器、执行器、传感器和被控对象组成。例如,在数控机床中,伺服电机接收控制信号,驱动刀具移动,同时编码器检测实际位置并反馈给控制器,形成闭环控制。这种结构使得系统能够补偿外部扰动(如负载变化)和内部误差(如非线性摩擦),从而维持高精度性能。
伺服系统的关键特征包括高响应速度、低稳态误差和强鲁棒性。根据被控变量类型,伺服系统可分为位置伺服、速度伺服和力矩伺服系统。在实际应用中,伺服系统常与数字信号处理器(DSP)或可编程逻辑控制器(PLC)结合,实现数字化控制,提升灵活性和可靠性。
从控制理论角度看,伺服系统本质是一个跟踪系统,其设计需解决稳定性、快速性和准确性之间的平衡问题。例如,过高的增益可能导致系统振荡,而过低的增益则会引起响应迟缓。因此,深入理解其控制原理至关重要。
3. 伺服系统的基本组成
一个典型的伺服系统包括以下组成部分:
-
控制器:作为系统的大脑,根据输入信号和反馈信号的偏差,计算控制量。常用控制器包括PID控制器、状态反馈控制器等。控制器设计需基于系统模型,以确保动态性能。
-
执行器:通常为伺服电机(如直流伺服电机或交流伺服电机),将控制信号转换为机械运动。执行器的动态特性直接影响系统响应,例如电机的转矩-速度关系需线性化处理。
-
传感器:用于检测被控变量的实际值,如编码器(测量位置)、测速发电机(测量速度)或力矩传感器。传感器精度决定了反馈信号的可靠性,其噪声和延迟需在建模中考虑。
-
被控对象:指需要控制的物理设备,如机械臂或工作台。其动力学行为通常用微分方程描述。
-
反馈环节:将传感器输出与参考输入比较,生成误差信号,驱动控制器调整输出。
这些组件通过闭环连接,形成一个动态系统。以位置伺服系统为例,其框图可表示为:参考输入 r(t)与反馈信号 y(t)比较得误差 e(t)=r(t)−y(t),控制器根据 e(t)生成控制信号 u(t),执行器驱动被控对象,输出 y(t) 由传感器检测并反馈。这种结构确保了系统对扰动和参数变化的适应性。
4. 伺服系统控制原理基础
伺服系统的控制原理基于反馈控制理论,其核心是最小化误差信号,以实现精确跟踪。反馈控制通过连续比较实际输出与期望输入,动态调整控制动作,从而克服系统不确定性和外部干扰。伺服系统通常采用负反馈,以增强稳定性和鲁棒性。
4.1 反馈机制
在伺服系统中,反馈机制是闭环控制的基础。设参考输入为 r(t),系统输出为 y(t),则误差 e(t)=r(t)−y(t)。控制器根据 e(t)计算控制信号 u(t),例如在比例控制中,u(t)=Kpe(t),其中 Kp 为比例增益。通过反馈,系统能够自动校正偏差,但需注意反馈可能引入相位滞后,影响稳定性。
稳定性是反馈系统的首要问题。根据奈奎斯特稳定性 criterion,系统稳定的充要条件是开环传递函数在右半s平面无极点,且奈奎斯特图不包围点 (−1,j0)。对于伺服系统,稳定性分析需考虑传感器延迟和执行器饱和等非线性因素。
4.2 性能指标
伺服系统的性能常用以下指标评估:
-
稳态误差:系统在稳定状态下与期望值的偏差,例如对于阶跃输入,稳态误差 ess=limsE(s)(s→0),其中 E(s)是误差的拉普拉斯变换。
-
响应时间:包括上升时间和调节时间,反映系统快速性。
-
超调量:输出超过稳态值的最大百分比,表征系统阻尼程度。
-
鲁棒性:系统在参数变化或扰动下的性能保持能力。
这些指标需在控制器设计中权衡。例如,增加比例增益 Kp 可减小稳态误差,但可能增大超调量。
5. 伺服系统的数学模型
数学模型是分析和设计伺服系统的关键工具。常用方法包括传递函数模型和状态空间模型,它们基于线性时不变(LTI)系统假设,但对于非线性系统,需采用线性化近似。
5.1 传递函数模型
传递函数描述系统输入与输出之间的动态关系,定义为输出拉普拉斯变换与输入拉普拉斯变换之比。考虑一个直流伺服电机位置控制系统,其被控对象可建模为二阶系统。设电机转矩与输入电压成正比,忽略电感,则运动方程为:
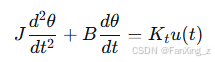
其中 J 为转动惯量,B 为阻尼系数,Kt 为转矩常数,θ(t) 为输出角度,u(t) 为输入电压。取拉普拉斯变换,假设初始条件为零,得传递函数:
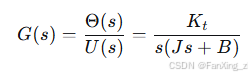
这是一个典型的一型系统,其开环传递函数包含一个积分环节,有助于减小阶跃输入下的稳态误差。
加入比例控制器 C(s)=Kp,则闭环传递函数为:

闭环特征方程为 s(Js+B)+KpKt=0,即 Js^2+Bs+KpKt=0。通过调整 Kp,可改变系统阻尼比 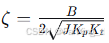
自然频率:

以控制响应特性。
5.2 状态空间模型
状态空间模型适用于多变量系统和非线性系统。将上述伺服系统表示为状态空间形式,定义状态变量 x1=θ(位置),x2=θ˙(速度),则状态方程为:
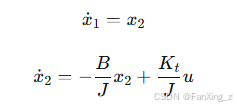
输出方程 y=x1。写成矩阵形式:
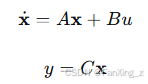
其中

状态空间模型便于设计状态反馈控制器,例如通过极点配置优化动态响应。
5.3 扰动与不确定性建模
实际伺服系统中,常存在负载扰动 d(t)d(t) 和参数不确定性。在状态空间模型中,可添加扰动项:

其中 EE 为扰动矩阵。控制器设计需考虑扰动抑制,例如通过积分动作消除稳态误差。
6. 伺服系统控制方法
伺服系统控制方法从经典PID控制到现代自适应控制,不断演进以应对复杂应用需求。
6.1 PID控制
PID(比例-积分-微分)控制是伺服系统最常用的控制策略,其控制律为:

其中 Kp、Ki、Kd 分别为比例、积分、微分增益。在频域,PID控制器传递函数为:
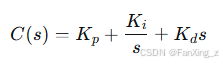
积分项用于消除稳态误差,微分项提供超前补偿,改善稳定性。参数整定常用齐格勒-尼科尔斯方法或基于模型优化。例如,对于二阶系统,可通过模拟确定临界增益和周期,计算PID参数。
然而,PID控制在非线性系统中可能性能受限,需结合滤波以抑制噪声。
6.2 状态反馈控制
基于状态空间模型,可设计状态反馈控制器。设控制律 u=−K,其中 K 为反馈增益矩阵。闭环系统动态由 x˙=(A−BK)x 描述。通过选择 K,可将闭环极点配置到期望位置,以指定响应特性。例如,对于伺服系统,期望极点可选为负实部复数,以确保快速无超调响应。
状态反馈需所有状态可测,否则需设计状态观测器,如龙伯格观测器:

其中 LL 为观测器增益,通过调整 LL 使估计误差动态稳定。
6.3 先进控制方法
随着应用复杂化,先进控制方法如自适应控制、滑模控制和模糊控制被引入伺服系统。自适应控制能在线调整参数,应对系统变化。例如,模型参考自适应控制(MRAC)设计参考模型表示理想响应,并通过自适应律调整控制器参数,使系统输出跟踪参考模型。
滑模控制基于切换面设计,对扰动不敏感。设滑模面 s=e+λe˙,控制律迫使系统状态在有限时间内到达滑模面,并沿面滑动至原点。这种方法鲁棒性强,但需处理颤振问题。
这些方法在高速高精度伺服系统中表现优异,但计算复杂度较高,常依赖数字实现。
7. 实际应用与案例分析
伺服系统在工业机器人中广泛应用。以六轴机器人为例,每个关节由伺服电机驱动,控制位置和力矩。系统建模需考虑多体动力学,状态方程包含耦合项。控制器设计常用计算转矩控制,基于逆动力学计算前馈补偿,结合PID反馈消除误差。
案例分析:某数控机床伺服系统,要求位置精度 ±0.001 mm。系统采用永磁同步电机,模型为:
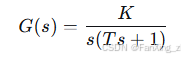
其中 K 为增益,T为时间常数。通过系统辨识得参数后,设计PID控制器,使用频域整定法优化参数。实验显示,加入微分滤波后,系统超调量从15%降至5%,响应时间缩短20%。
此外,伺服系统在航空航天中用于舵面控制,需处理高速扰动和参数变化,常采用自适应PID或 H∞ 控制,以最大化鲁棒性。
8. 总结与展望
本文深度解析了伺服系统控制原理,从基本组成到数学模型,再到控制方法,系统阐述了其工作机制和设计要点。伺服系统的核心在于反馈控制和数学模型的应用,通过PID、状态反馈等方法实现高精度跟踪。数学建模工具如传递函数和状态空间,为分析和优化提供了基础。
未来,伺服系统将更注重智能化和集成化。结合人工智能技术,如深度学习用于参数自整定,可进一步提升自适应能力。同时,与物联网融合,实现远程监控和预测性维护。控制理论的发展,如事件触发控制和网络化控制,将解决资源约束下的优化问题。
总之,伺服系统控制原理是自动控制领域的基石,深入理解其理论并结合实践,将推动工业自动化向更高水平发展。
参考文献
-
Franklin, G. F., Powell, J. D., & Emami-Naeini, A. (2015). Feedback Control of Dynamic Systems. Pearson.
-
Ogata, K. (2010). Modern Control Engineering. Prentice Hall.
-
Astrom, K. J., & Hagglund, T. (2006). Advanced PID Control. ISA.
-
Slotine, J. J. E., & Li, W. (1991). Applied Nonlinear Control. Prentice Hal