问题1:下载EGO-Planner源码并编译时遇到Intel-RealSense SDK找不到的问题
-
报错展示:
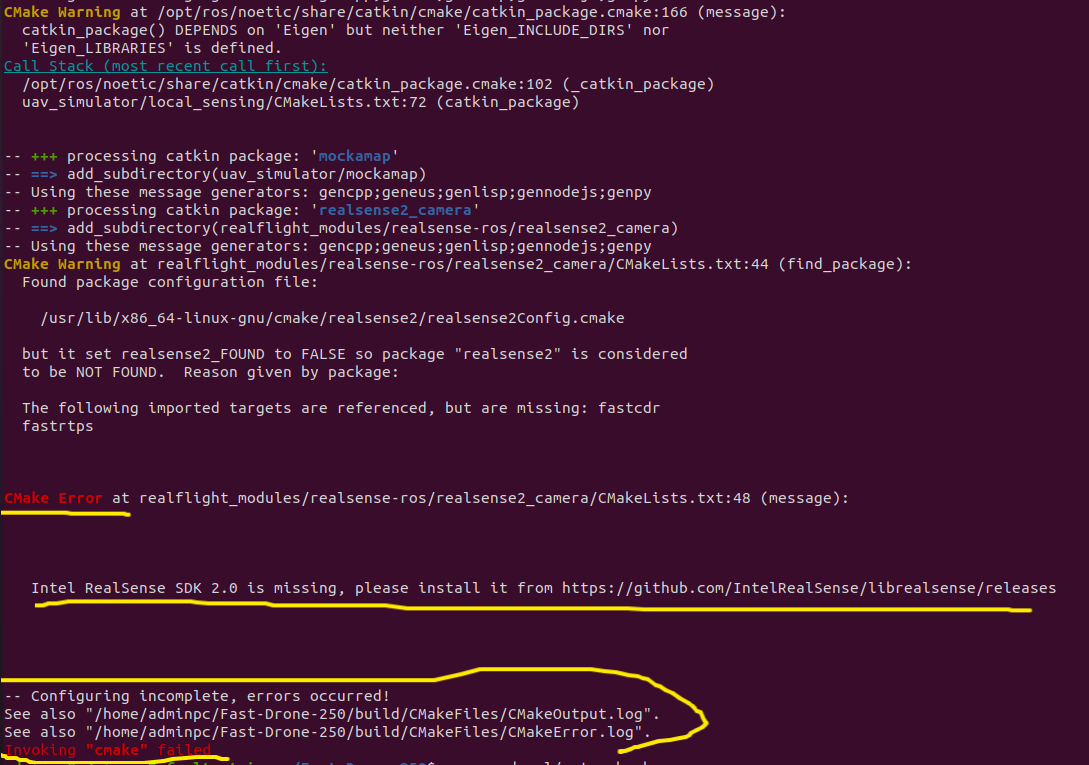
在配置完ROS、realsense驱动、mavros、ceres、glog与ddyanmic-reconfigure后。对EGO-Planner源码进行编译的时候出现如下报错

-
原因:直接使用realsense2的配置文件配置的Intel-RealSence SDK 版本大于2.50,而ROS1的noetic环境下并不支持高版本,所以需要降低Intel-RealSence SDK 的版本。而2.50版本是最后一个完全支持ROS1的版本。
-
解决:
- 首先通过命令将源文件删除
python
sudo dpkg --purge $(dpkg -l | grep "realsense" | cut -d " " -f 3)- 通过命令安装所有包
python
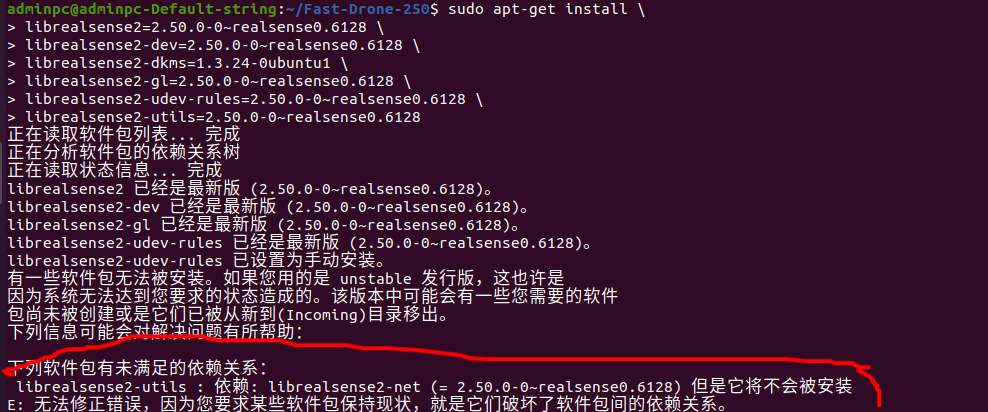
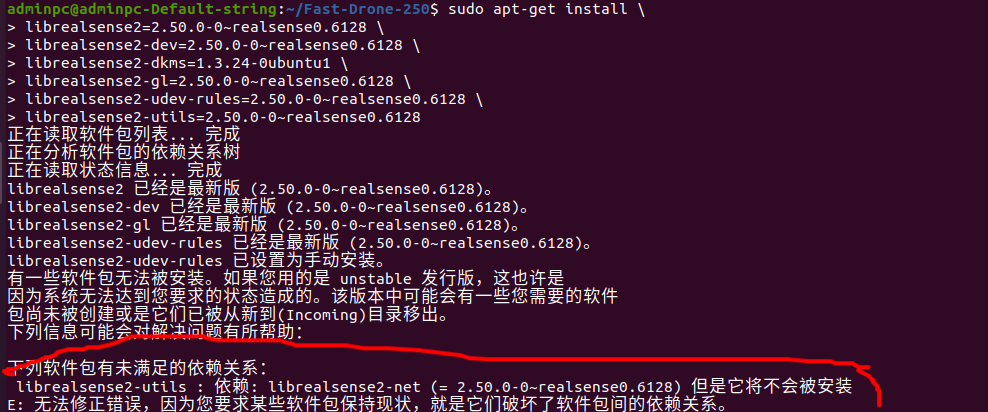
sudo apt-get install \
librealsense2=2.50.0-0~realsense0.6128 \
librealsense2-dev=2.50.0-0~realsense0.6128 \
librealsense2-dkms=1.3.24-0ubuntu1 \
librealsense2-gl=2.50.0-0~realsense0.6128 \
librealsense2-udev-rules=2.50.0-0~realsense0.6128 \然后会出现如下信息:
- 安装缺失的net包
python
sudo apt-get install \
librealsense2-net=2.50.0-0~realsense0.6128 \
librealsense2-utils=2.50.0-0~realsense0.6128- 然后检查所有安装的包
python
# 检查所有安装的包
dpkg -l | grep realsense
# 测试 RealSense 查看器
realsense-viewer
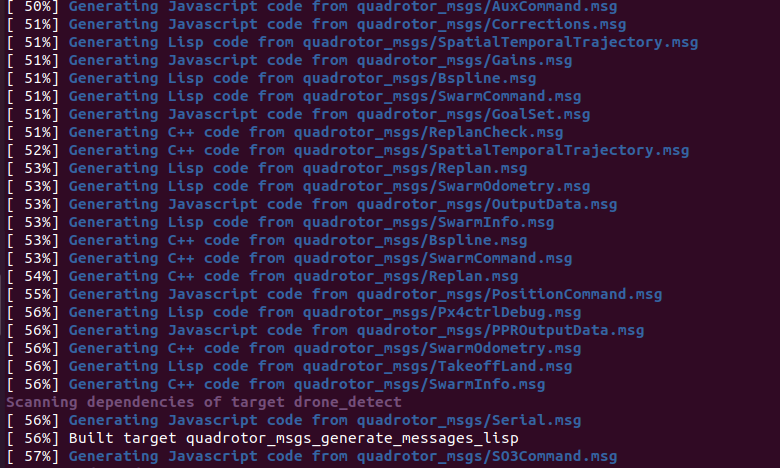
- 最后,再次编译,出现百分比的进度就说明没问题了
然后启动!

感谢fastlab实验室开源!