在自然灾害、事故灾难等应急救援场景中,"信息不对称"是阻碍救援效率的最大瓶颈。传统指挥模式严重依赖人员现场回报,存在信息滞后、视角单一、风险高等问题。指挥中心如同在迷雾中决策,难以全面、实时地掌握瞬息万变的现场态势。
如今,无人机与RTMP推流平台EasyDSS的融合,正以其"上帝视角"与"零延迟信息通路"的强大能力,彻底颠覆传统应急指挥模式,为救援行动装上了一双洞察全局的"智慧天眼"。
一、技术方案:如何实现"空中视角"的实时共享?
1、前端采集:无人机作为"空中侦察兵"
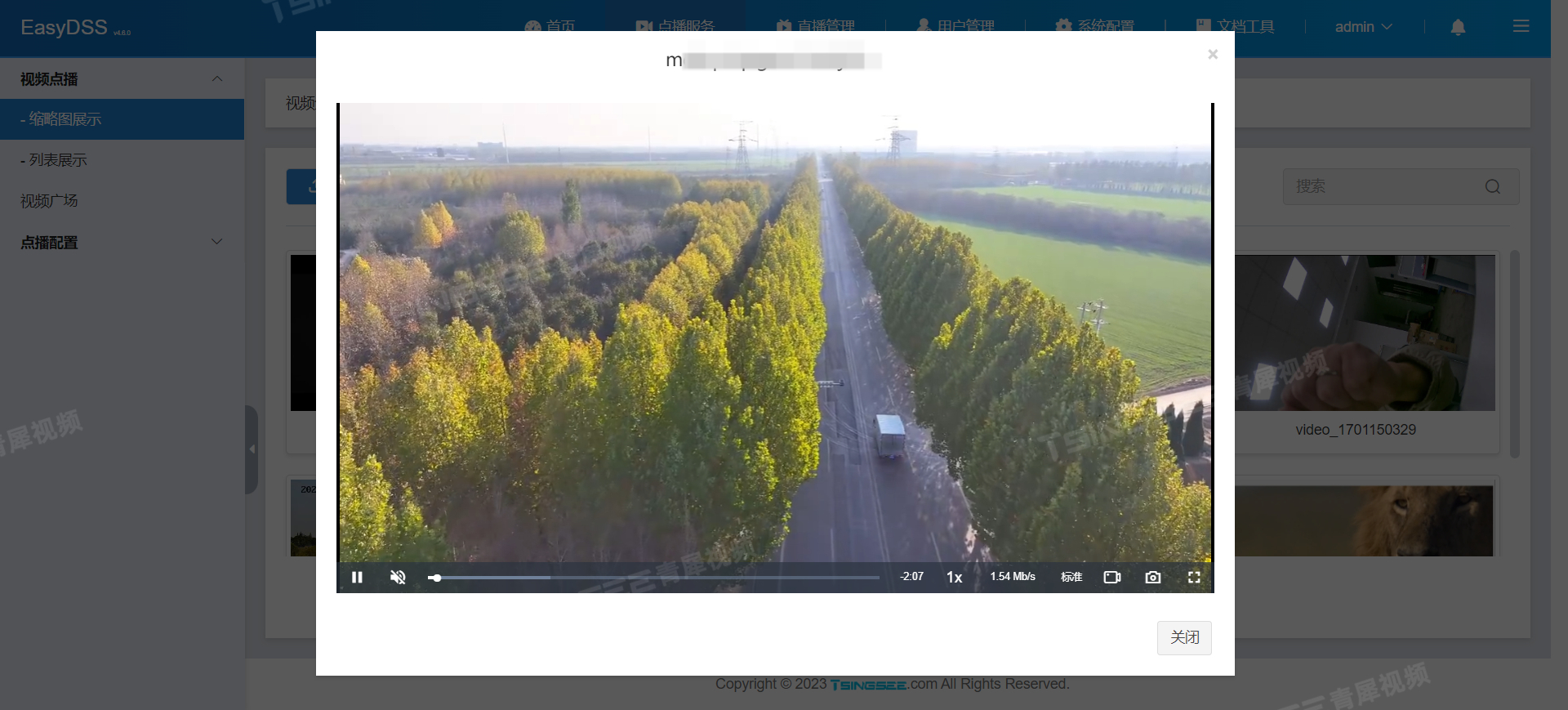
搭载高清摄像头的无人机飞抵事故现场上空,成为指挥中心延伸的"眼睛"。
2、视频推流:RTMP协议作为"高速传输带"
无人机通过4G/5G网络或专用图传链路,将采集到的实时视频流,以RTMP协议直接推流到部署在云端或本地的EasyDSS流媒体服务器,RTMP协议以其延迟低、稳定性好的特点,成为直播推流领域的事实标准,能确保视频流高效、不间断地传输至中心平台。
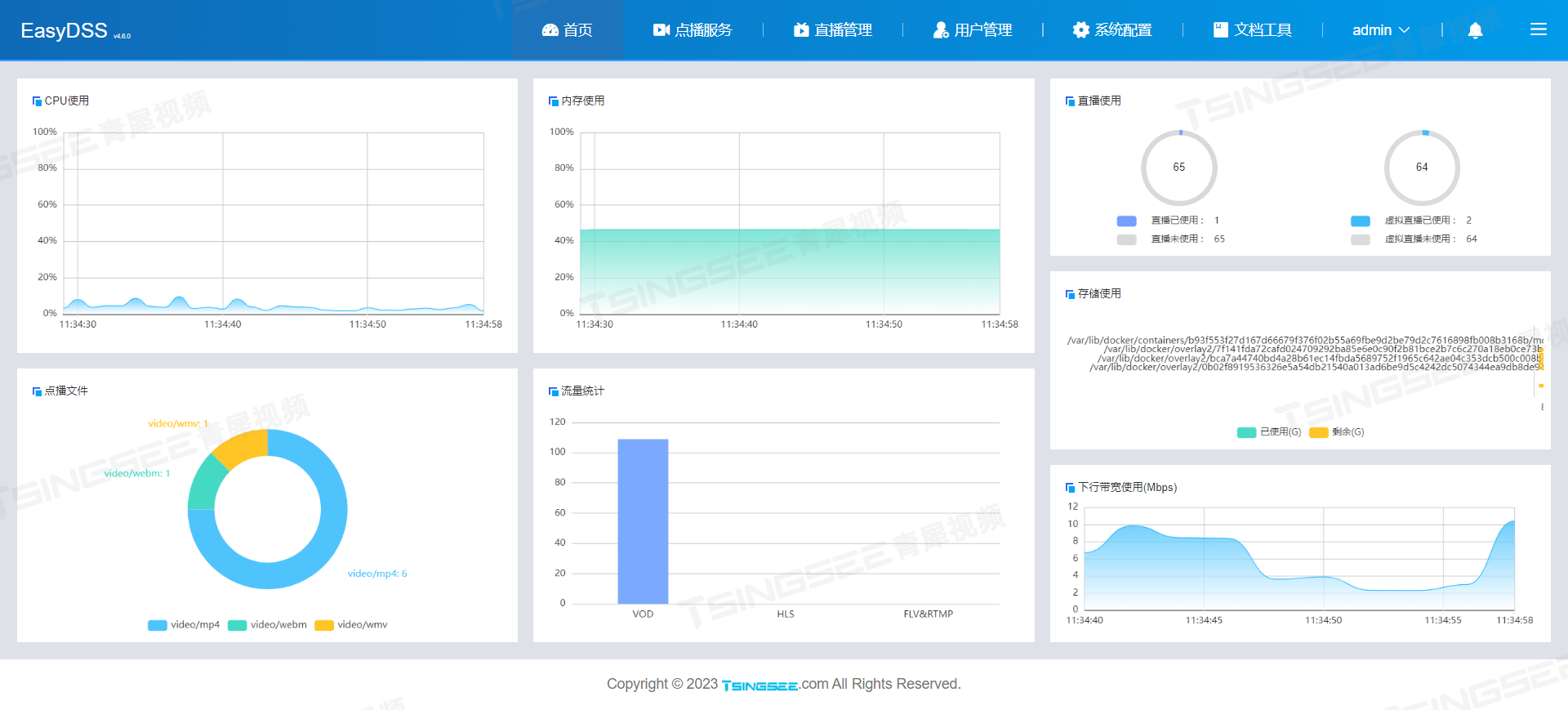
3、流媒体中枢:EasyDSS作为"视频调度中心"
-
流接收与转码:EasyDSS稳定接收来自无人机的RTMP流。
-
多协议、多格式输出:这是EasyDSS的核心价值。它将接入的RTMP流,实时转换成HLS、FLV、RTMP、RTSP等多种格式。
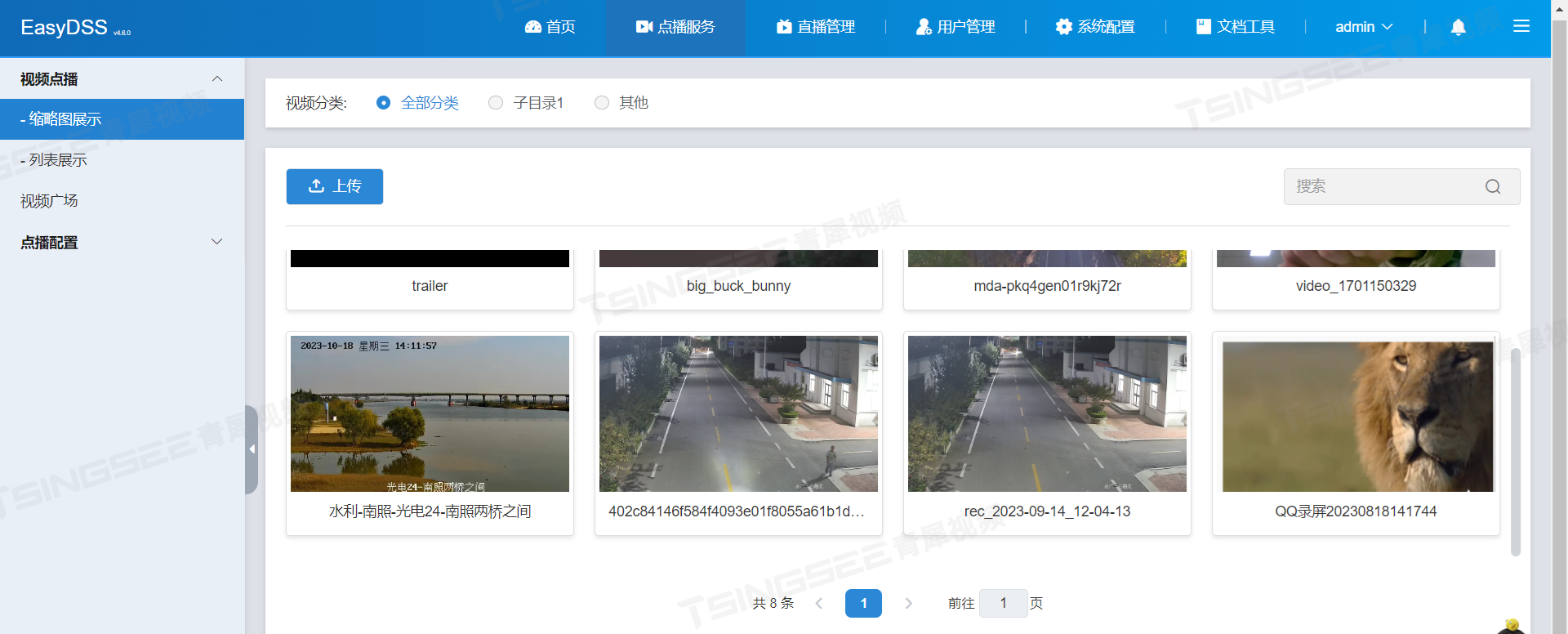
4、终端应用:全终端覆盖的"指挥决策屏"
经EasyDSS处理后的视频流,可通过一个简单的URL,被各种终端轻松调用,指挥中心大屏将全局态势一览无余地展示出来,指挥员电脑/平板指挥员可移动查看多个无人机视角,现场救援人员手机,通过浏览器等直接接收指挥中心下发的直播链接,了解全局指令和风险提示。
二、场景赋能:EasyDSS+无人机如何破解应急指挥难题?
1、灾情评估:第一时间穿透"信息迷雾"
场景:地震、洪涝灾害后,道路中断,人员无法进入核心区,无人机迅速飞抵灾区上空,将受灾范围、建筑物损毁情况、人员受困大致位置等高清画面,通过EasyDSS实时呈现在指挥中心大屏上。决策者无需亲临险境,即可"身临其境",为精准派遣救援力量、评估灾情等级提供最关键的一手资料。
2、消防灭火:打造"立体化"作战视图
场景:化工厂火灾、森林大火,现场浓烟滚滚,地面视线受阻,无人机从高空俯瞰,透过烟雾精准定位火点核心区、判断火势蔓延方向、监测危化品储罐风险。前方消防指挥员可在平板电脑上实时接收信息,及时调整灭火策略,规避爆炸风险。
3、人员搜救:扩大"生命探测"范围
场景:山区驴友失联、地震后人员被掩埋,多架无人机进行网格化飞行,利用广角镜头快速扫描大片区域,极大提升搜救效率。
结语
在分秒必争的应急指挥救援中,信息就是生命。RTMP推流平台EasyDSS与无人机技术的结合,不仅仅是一次技术集成,更是一次应急指挥模式的深刻变革。它构建了一条从"空中第一视角"到"指挥决策大脑"的瞬时信息高速公路,让指挥员看得更全、看得更真、决策更准,最终为保护人民生命财产安全构筑起一道坚实的"科技生命线"。