FreeRTOS的内存管理
在讲述FreeRTOS的内存管理之前,先来看看这张图片
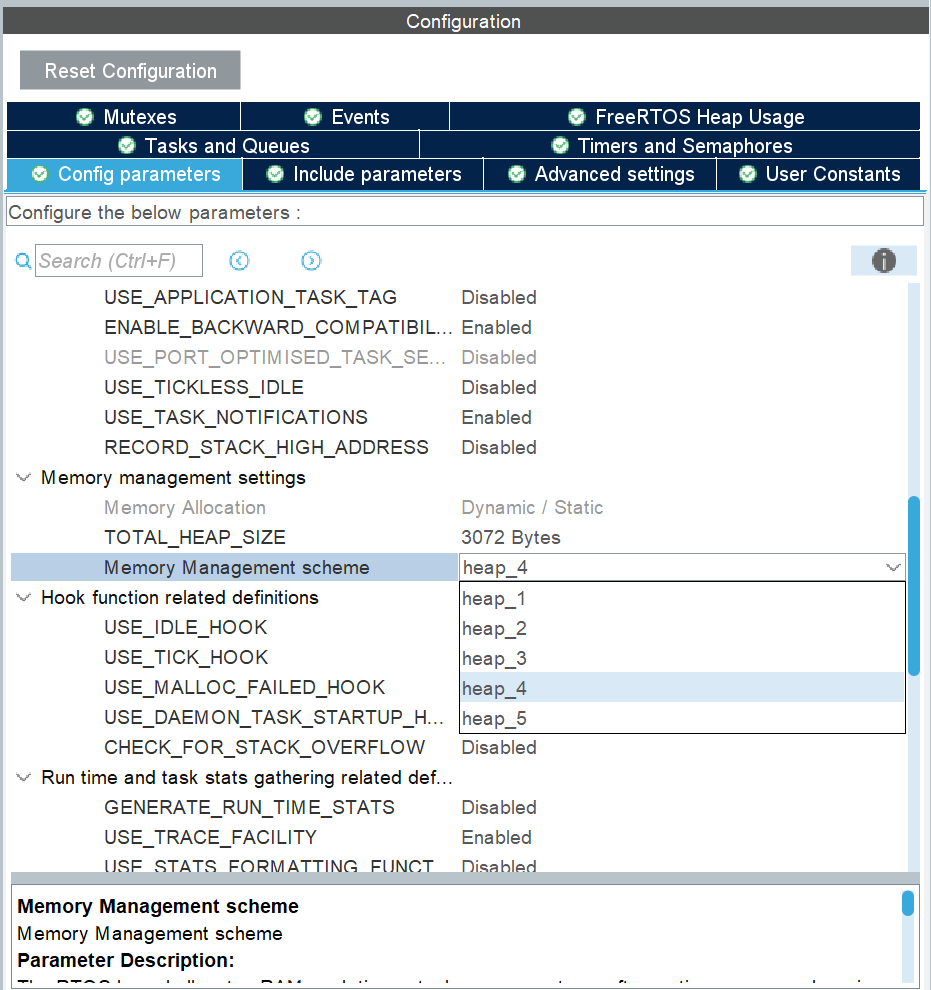
在Memory management scheme中,有五个不同的堆区,每一个堆区都有不同的特点
1 、动态创建和静态创建
动态:自动地从FreeRTOS管理的内存堆中申请创建对象所需的内存,并且在对象删除后,可将这块内存释放回FreeRTOS管理的内存堆
静态:由用户预先分配内存(通常是全局变量或静态变量),并且使用静态方式占用的内存空间一般固定下来了,即使任务、队列等被删除后,这些被占用的内存空间也没有释放
感兴趣的了解可以了解一下静态创建和动态创建对象的区别-CSDN博客
2 、函数的使用
为什么不使用malloc()和free()?主要原因与 其内存管理特性不适应嵌入式实时系统的需求有关
cpp
1、内存分配时间不确定(非确定性)
标准malloc()和free()的实现(如基于链表的内存块管理)中,分配/释放内存的耗时与当前堆内存的碎片化
程度、已分配块的数量相关,无法提前预测执行时间。
对于实时系统(如工业控制、汽车电子),任务必须在严格的时间窗口内响应(如微秒级),
malloc() / free()的耗时波动可能导致任务超时,破坏系统实时性。
2、内存碎片问题
频繁调用malloc()和free()会导致堆内存碎片化:即堆中存在大量无法被有效利用的小内存块(碎片),最终
可能出现 "总内存充足但无法分配连续大内存块" 的情况,导致malloc()失败。
嵌入式系统通常内存资源有限(如RAM仅几十KB),碎片化问题更易爆发,且难以通过外部手段(如重启)修
复,可能导致系统长期运行后崩溃。
3、线程安全问题
标准C库的malloc()/free()并非天生线程安全(不同编译器实现不同),在多任务系统中,多个任务同时调用
时可能导致堆数据结构(如链表指针)被破坏,引发内存泄漏、程序崩溃等难以调试的问题。
虽然部分库通过加锁实现线程安全,但锁的引入会进一步增加耗时不确定性,且可能导致任务优先级反转
4、内存使用不可控
malloc()分配的内存大小由运行时参数决定,若代码中存在错误(如分配过大内存),可能瞬间耗尽堆资源,
导致其他关键任务(如系统任务)因内存不足而失败。
嵌入式系统通常需要在编译期确定内存使用上限(如静态内存分配),而malloc()的动态性使其难以在开发阶
段预估和验证内存需求。在这里
FreeRTOS 针对嵌入式场景提供了更优的内存管理方案,避免了malloc()/free()的缺陷:
动态内存:使用内核自带的 pvPortMalloc() 和 vPortFree() ,其实现(如 heap_4.c 、 heap_5.c )采用内存块合并策略,减少碎片,且支持线程安全(通过临界区保护)。
静态内存:通过 xTaskCreateStatic() 、 xQueueCreateStatic() 等API,在编译期分配内存,完全避免动态分配,确保确定性和无碎片。
二 、 FreeRTOS内存管理算法
1、 heap_1内存管理算法
heap_1只实现了pvPortMalloc,没有实现vPortFree。也就是说,它只能申请内存,无法释放内存 。
如果你的工程,创建好的任务、队列、信号量等都不需要被删除,那么可以使用heap_1内存管理算法, heap_1的实现最为简单,管理的内存堆是一个数组,在申请内存的时候,heap_1内存管理算法只是简单地从数组中分出合适大小的内存 ,内存堆数组的定义如下所示
/* 定义一个大数组作为FreeRTOS管理的内存堆 */
static uint8_t ucHeapconfigTOTAL_HEAP_SIZE;
pvPortMalloc()函数原理:就是把数组切分不同小块使用,这个数组大小为configTOTAL_HEAP_SIZE,通常创建任务的内存分配为两块:TCB和任务堆栈(之前提到过感兴趣的可以看看之前的)
cpp
void * pvPortMalloc( size_t xWantedSize )
{
void * pvReturn;
vTaskSuspendAll();
{
pvReturn = malloc( xWantedSize );
traceMALLOC( pvReturn, xWantedSize );
}
( void ) xTaskResumeAll();
#if ( configUSE_MALLOC_FAILED_HOOK == 1 )
{
if( pvReturn == NULL )
{
vApplicationMallocFailedHook();
}
}
#endif
return pvReturn;
}
cpp
void vPortFree( void * pv )
{
if( pv != NULL )
{
vTaskSuspendAll();
{
free( pv );
traceFREE( pv, 0 );
}
( void ) xTaskResumeAll();
}
}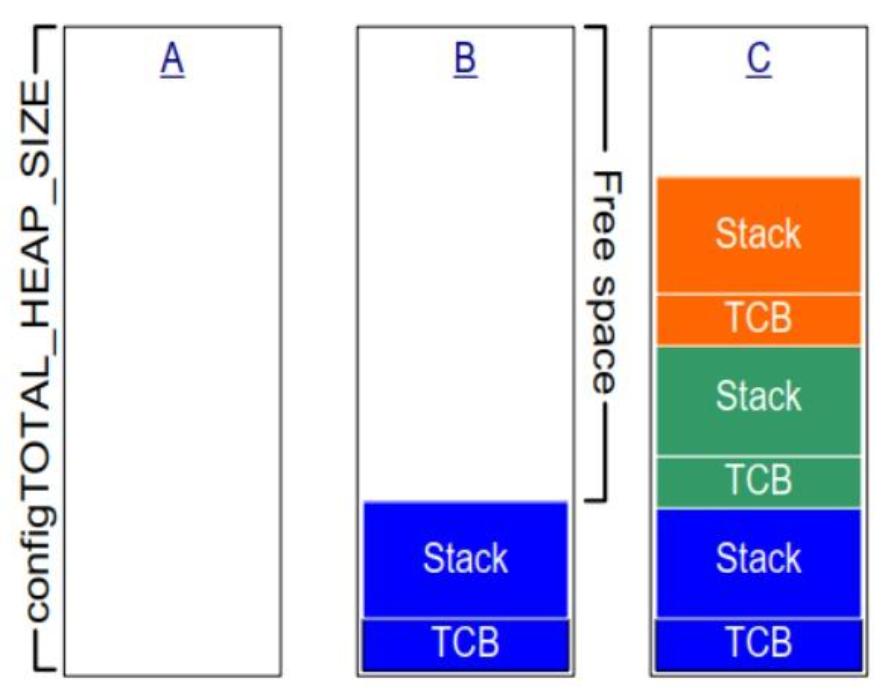
图A表明创建task前,整个数组是空的
图B表明创建一个task后,数组使用情况
图C表明创建3个Task后,数组使用情况的变化
2 、 heap_2内存管理算法
Heap_2也是通过configTOTAL_HEAP_SIZE来定义数组,使用了best-fit算法**最适应算法**分配内存,实现了VPortFree()函数。best-fit算法可以确保pvPortMalloc申请的空闲内存大小必须非常接近函数请求大小。因为Heap_2不能对相邻空闲块进行合并,因此缺点是会产生内存碎片,当然,如果每次申请空间都是相等,此缺点也可以忽略
最适应算法:假设heap有3块空闲内存(按内存块大小由小到大排序)︰5字节、25字节、50字节,现在新创建一个任务需要申请20字节的内存:找出最小的、能满足pvPortMalloc的内存:25字节,把它划分为20字节和5字节,返回这20字节的地址,剩下的5字节仍然是空闲状态,留给后续的pvPortMalloc使用
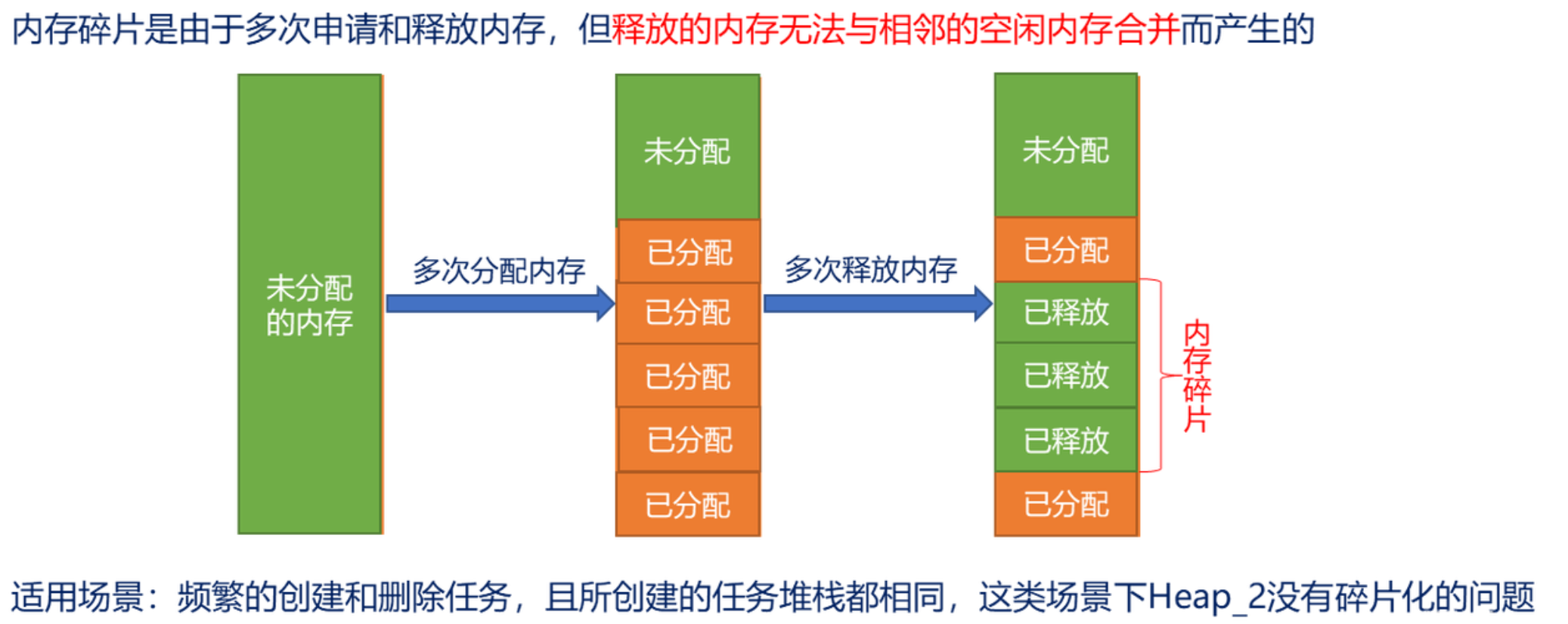
无法合并的会导致资源的浪费,所以最适用于创建任务堆栈都相同的场景
3、Heap_3内存管理算法
Heap_3方案只是简单的封装了标准C库中的malloc()和free()函数,并且能满足常用的编译器。 重新封装后的malloc()和free()函数具有保护功能,采用的封装方式是操作内存前挂起调度器、完成后再恢复调度器。
在使用这种模式时,FreeRTOSConfig.h文件中的configTOTAL_HEAP_SIZE宏定义不起作用。使用的是启动文件中设置的堆的大小,单位为字节

4 、 Heap_4内存管理算法
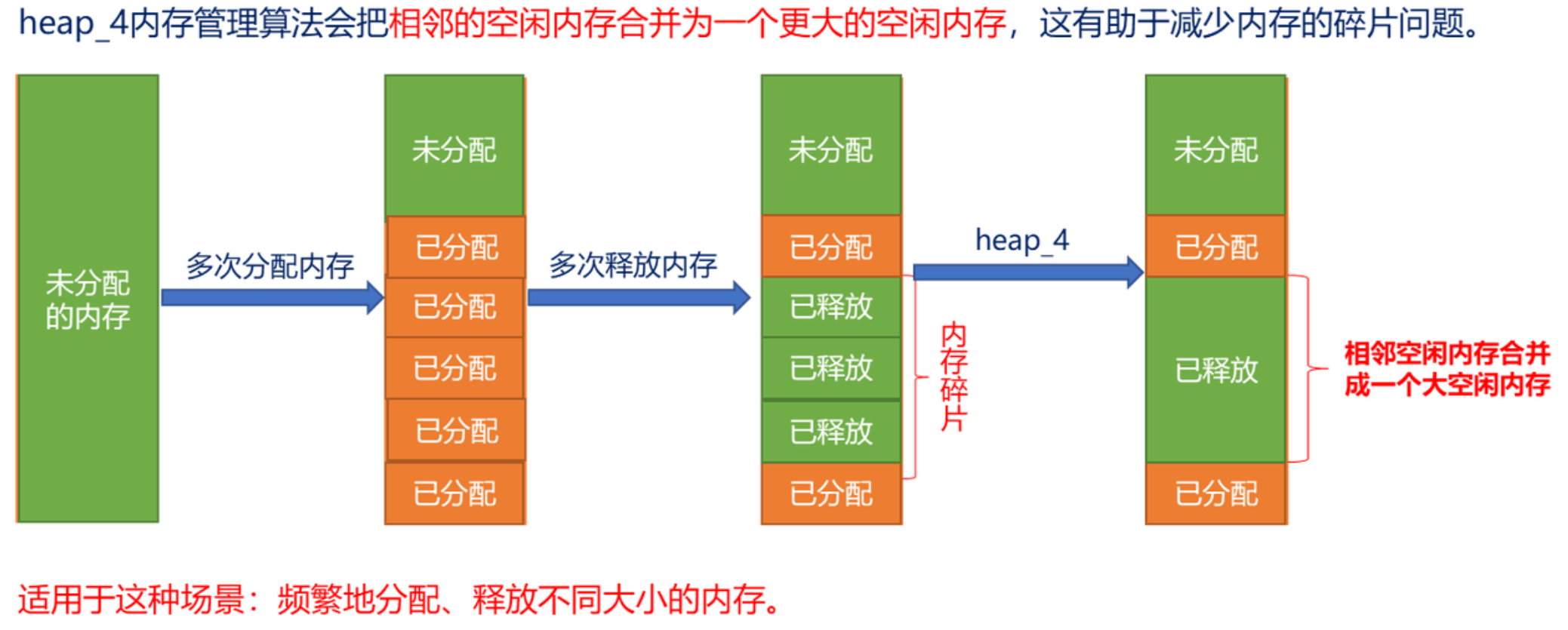
heap_4内存管理算法使用了 首次适应算法 , 也支持内存的申请与释放,并且能够将空闲且相邻的内存进行合并,从而减少内存碎片的现象。
首次适应算法:假设heap有3块空闲内存(按内存块地址由低到高排序)︰5字节、50字节、25字节,现在新创建一个任务需要申请20字节的内存,找出第一个能满足pvPortMalloc的内存:50字节,把它划分为20字节和30字节;返回这20字节的地址,剩下30字节仍然是空闲状态,留给后续的pvPortMalloc使用
相比于最适应算法,最大的不同是释放的内存可以合并
5 、 Heap_5内存管理算法
Heap_5使用与Heap_4相同的算法进行分配内存, 但是heap_5内存管理算法在heap_4内存管理算法的基础上实现了管理多个非连续内存区域的能力 ,heap_5内存管理算法默认并没有定义内存堆,需要用户手动指定内存区域的信息,并对其进行初始化。
怎么指定一块内存?------使用如下结构体:
cpp
/* Used by heap_5.c to define the start address and size of each memory region that
together comprise the total FreeRTOS heap space. */
typedef struct HeapRegion
{
uint8_t * pucStartAddress; // 内存区域的起始地址。
size_t xSizeInBytes; // 内存区域的大小
} HeapRegion_t;
HeapRegion_t结构体:用户需要指定每个内存堆区域的起始地址和内存堆大小、将它们放在一个
HeapRegion_t结构体类型数组中,这个数组必须用一个 NULL指针和0作为结尾,起始地址必须从小到大排
列怎么指定多块不连续内存?这个是嵌入式实时操作系统 FreeRTOS 中的一个特定数据结构,用于 配置和管理 "多区域堆内存"(Multiple Heap Regions)
cpp
*
在内存中为内存堆分配两个内存块。
第一个内存块大小为0x10000字节,起始地址为0x80000000,
第二个内存块大小为0xa0000字节,起始地址为0x90000000。
起始地址为0x80000000的内存块的起始地址更低,因此放到了数组的第一个位置。
*/
const HeapRegion_t xHeapRegions[] = {
{ ( uint8_t * ) 0x80000000UL, 0x10000 },
{ ( uint8_t * ) 0x90000000UL, 0xa0000 },
{ NULL, 0 } /* 数组结尾 */
}三 、 FreeRTOS内存管理相关API函数介绍
1. 申请内存 (pvPortMalloc)
pvPortMalloc 是 FreeRTOS 提供的动态内存分配函数,类似于标准 C 库的 malloc。
cpp
void *pvPortMalloc( size_t xSize );示例:
cpp
#include "FreeRTOS.h"
#include "task.h"
void vMyTask( void *pvParameters )
{
int *piData;
// 申请 4 个字节的内存(一个 int)
piData = (int *)pvPortMalloc( sizeof(int) );
if( piData != NULL )
{
*piData = 123; // 写入数据
vTaskDelay( pdMS_TO_TICKS( 1000 ) ); // 延时
vPortFree( piData ); // 释放内存
}
vTaskDelete( NULL ); // 删除任务
}2. 释放内存 (vPortFree)
vPortFree 用于释放之前由 pvPortMalloc 分配的内存
cpp
void vPortFree( void *pv );3. 获取当前空闲内存大小
cpp
size_t xPortGetFreeHeapSize( void );
size_t xPortGetMinimumEverFreeHeapSize( void );
cpp
void vCheckHeap( void )
{
size_t xFreeBytes;
size_t xMinFreeBytes;
xFreeBytes = xPortGetFreeHeapSize();
xMinFreeBytes = xPortGetMinimumEverFreeHeapSize();
printf("当前空闲内存: %u 字节\n", xFreeBytes);
printf("历史最小空闲内存: %u 字节\n", xMinFreeBytes);
}