在嵌入式开发领域,实时操作系统(RTOS)是实现复杂任务调度的核心工具,而FreeRTOS以其轻量、可裁剪、高移植性的特点,成为众多开发者的首选。本文将从RTOS基础概念入手,深入剖析FreeRTOS的核心数据结构(任务控制块、列表与列表项),并结合源码详解任务切换的底层实现,带大家看透FreeRTOS的运行本质。
一、RTOS与FreeRTOS基础认知
1.1 什么是RTOS?
RTOS(Real Time Operation System,实时操作系统)是一种能够保证任务在规定时间内完成响应的操作系统,核心优势在于和。与裸机开发的"顺序执行+中断"模式不同,RTOS通过内核调度,让多个任务"并发"运行,大幅提升系统的复杂度和可靠性。
1.2 FreeRTOS的核心特性
FreeRTOS作为一款经典的轻量级RTOS,具备以下关键特性,使其在嵌入式领域广泛应用:
-
FreeRTOS的内核支持抢占式,合作式和时间片调度。
-
SafeRTOS衍生自FreeRTOS,SafeRTOS在代码完整性上相比FreeRTOS更胜一筹。
-
提供了一个用于低功耗的Tickless模式。
-
系统的组件在创建时可以选择动态或者静态的RAM,比如任务,消息队列,信号量,软件定时器等等。
-
已经超过30种架构的芯片进行了移植。
-
FreeRTOS-MPU支持Corex-M系列的MPU单元。
-
FreeRTOS系统简单,小巧,易用,通常情况下内核占用4K-9K字节的空间。
-
高可移植性,代码主要C语言编写。
-
支持实时任务和协程。
-
任务和任务,任务与中断之间可以使用任务通知,消息队列,二值信号量,数值型信号量,递归互斥信号量和互斥信号量进行通信和同步。
-
创新的事件组。
-
具有优先级继承特性的互斥信号量。
-
高效的软件定时器。
-
强大的跟踪执行功能。
-
堆栈溢出检测功能。
-
任务数量不限。
-
任务优先级不限。
二、FreeRTOS核心数据结构解析
2.1 任务控制块(TCB)
任务控制块(Task Control Block,TCB)是FreeRTOS中描述任务属性的核心结构体,每个任务对应一个TCB,内核通过TCB管理任务的状态、优先级、栈等关键信息。以下是简化后的TCB结构及核心字段解析:
typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; /* 任务栈顶指针(TCB第一个成员) */
ListItem_t xStateListItem; /* 任务状态列表项(关联状态列表) */
ListItem_t xEventListItem; /* 事件列表项(关联事件列表) */
UBaseType_t uxPriority; /* 任务优先级(0为最低,数值越大优先级越高) */
StackType_t *pxStack; /* 任务栈起始地址 */
char pcTaskName[ configMAX_TASK_NAME_LEN ]; /* 任务名称(调试用) */
#if ( configUSE_MUTEXES == 1 )
UBaseType_t uxBasePriority; /* 基础优先级(用于优先级继承) */
UBaseType_t uxMutexesHeld; /* 持有互斥信号量数量 */
#endif
/* 其他可选字段:临界区嵌套计数、运行时间统计、任务通知状态等 */
} tskTCB;核心字段作用详解:
-
:指向任务栈的栈顶,是TCB的第一个成员,------任务切换时需通过该指针保存/恢复寄存器状态;
-
:将任务链接到内核的"状态列表"(如就绪列表、阻塞列表),通过该列表项标识任务当前状态;
-
:当任务等待某个事件(如信号量、消息队列)时,通过该列表项链接到对应的"事件列表";
-
:任务的运行优先级,FreeRTOS调度器优先执行高优先级任务;
-
:指向任务栈的起始地址,栈的大小在创建任务时指定,用于存储任务的局部变量、寄存器值等。
2.2 列表与列表项
FreeRTOS通过"列表(List)"和"列表项(ListItem)"实现高效的任务管理,本质是一种结构。列表用于组织具有相同状态的任务(如就绪列表管理所有就绪任务),列表项则是任务与列表的"连接桥梁"(每个任务的TCB中包含列表项)。
2.2.1 列表(List)结构
列表是管理列表项的容器,核心字段包括列表项计数、遍历指针和尾标记:
typedef struct xLIST
{
configLIST_VOLATILE UBaseType_t uxNumberOfItems; /* 列表中列表项数量 */
ListItem_t * configLIST_VOLATILE pxIndex; /* 列表遍历指针 */
MiniListItem_t xListEnd; /* 列表尾标记(始终在末尾) */
} List_t;关键字段说明:
-
:记录列表中有效列表项的数量(不包含尾标记xListEnd);
-
:用于遍历列表的指针,简化列表项的访问;
-
:列表的尾标记(MiniListItem_t是精简版列表项),其xItemValue设为最大值(portMAX_DELAY),确保始终位于列表末尾,简化边界判断。
2.2.2 列表项(ListItem)结构
列表项是链接到列表的节点,每个列表项关联一个"所有者"(通常是TCB),核心结构如下:
struct xLIST_ITEM
{
configLIST_VOLATILE TickType_t xItemValue; /* 列表项排序值 */
struct xLIST_ITEM * configLIST_VOLATILE pxNext; /* 下一个列表项指针 */
struct xLIST_ITEM * configLIST_VOLATILE pxPrevious; /* 上一个列表项指针 */
void * pvOwner; /* 列表项所有者(通常指向TCB) */
void * configLIST_VOLATILE pvContainer; /* 列表项所在的列表 */
};
typedef struct xLIST_ITEM ListItem_t;关键字段说明:
-
:列表项的排序值,列表按该值------就绪列表中该值为任务优先级,延时列表中为任务唤醒的系统节拍数;
-
:双向链表指针,实现列表项的前后关联;
-
:指向列表项的所有者,对于任务状态列表项,此处指向任务的TCB;
-
:指向列表项所在的列表,快速定位列表项所属容器。
2.2.3 列表的核心操作
列表的核心操作包括初始化、列表项插入和遍历,这些操作是任务状态切换的基础。
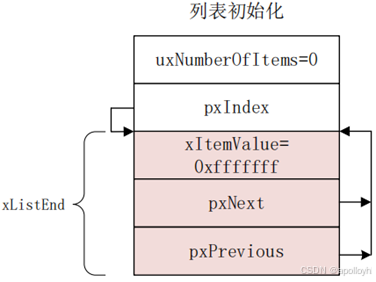
1. 列表初始化(vListInitialise)
初始化列表时,将尾标记xListEnd的前后指针指向自身,形成空的双向循环链表,遍历指针pxIndex指向尾标记:```
void vListInitialise( List_t * const pxList )
{
pxList->pxIndex = ( ListItem_t * ) &( pxList->xListEnd ); /* 遍历指针指向尾标记 */
pxList->xListEnd.xItemValue = portMAX_DELAY; /* 尾标记排序值设为最大值 */
pxList->xListEnd.pxNext = ( ListItem_t * ) &( pxList->xListEnd ); /* 尾标记自环 */
pxList->xListEnd.pxPrevious = ( ListItem_t * ) &( pxList->xListEnd );
pxList->uxNumberOfItems = 0U; /* 列表项数量初始化为0 */
}
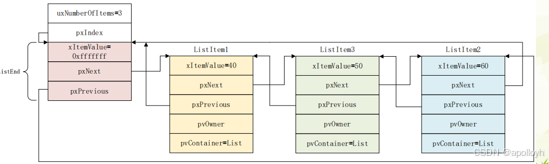
2. 列表项插入(vListInsert)
列表项插入采用的方式,相同排序值的列表项插入到已有项之后(确保同优先级任务的时间片调度)。核心逻辑是先判断插入值是否为尾标记专用的最大值,再找到对应插入位置并修改链表指针,以下是完整函数解析:
void vListInsert( List_t * const pxList, ListItem_t * const pxNewListItem )
{
ListItem_t *pxIterator;
const TickType_t xValueOfInsertion = pxNewListItem->xItemValue; /* 获取待插入项的排序值 */
/* 查找插入位置:从列表的pxIndex开始,找到第一个xItemValue大于插入值的项 */
if( xValueOfInsertion == portMAX_DELAY )
{
/* 若插入值为最大值(通常是尾标记),直接插入到尾标记的前面 */
pxIterator = pxList->xListEnd.pxPrevious;
}
else
{
/* 遍历列表,找到第一个排序值大于插入值的项 */
for( pxIterator = ( ListItem_t * ) &( pxList->xListEnd );
pxIterator->pxNext->xItemValue <= xValueOfInsertion;
pxIterator = pxIterator->pxNext )
{
/* 空循环,仅通过for循环条件移动指针 */
}
}
/* 插入新项:调整前后项的指针关系 */
pxNewListItem->pxNext = pxIterator->pxNext; /* 新项的后继 = 找到的项的后继 */
pxNewListItem->pxPrevious = pxIterator; /* 新项的前驱 = 找到的项 */
pxIterator->pxNext->pxPrevious = pxNewListItem; /* 找到的项的后继的前驱 = 新项 */
pxIterator->pxNext = pxNewListItem; /* 找到的项的后继 = 新项 */
/* 将新项所属的列表指针指向当前列表 */
pxNewListItem->pxContainer = pxList;
/* 列表项数量加1 */
( pxList->uxNumberOfItems )++;
}
3.列表项末尾插入(vListInsertEnd)
前文中的vListInsert是"按排序值有序插入",而FreeRTOS还提供了另一种插入方式------vListInsertEnd(末尾插入)。从函数名可直观判断,它不关注排序值,仅将列表项插入到特定位置,这一特性在"同优先级任务调度"中至关重要。
void vListInsertEnd( List_t * const pxList, ListItem_t * const pxNewListItem )
{
ListItem_t * const pxIndex = pxList->pxIndex;
/* 完整性校验(仅在开启configASSERT时生效) */
listTEST_LIST_INTEGRITY( pxList );
listTEST_LIST_ITEM_INTEGRITY( pxNewListItem );
/* 插入逻辑:将新项插入到pxIndex的前驱位置 */
pxNewListItem->pxNext = pxIndex;
pxNewListItem->pxPrevious = pxIndex->pxPrevious;
/* 覆盖率测试延迟(仅测试用) */
mtCOVERAGE_TEST_DELAY();
pxIndex->pxPrevious->pxNext = pxNewListItem;
pxIndex->pxPrevious = pxNewListItem;
/* 记录项所属列表 */
pxNewListItem->pvContainer = ( void * ) pxList;
/* 列表项计数加1 */
( pxList->uxNumberOfItems )++;
}4.列表遍历
#define listGET_OWNER_OF_NEXT_ENTRY( pxTCB, pxList ) \
{ \
List_t * const pxConstList = ( pxList ); \
/* 移动遍历指针到下一项,跳过尾标记 */ \
( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext; \
if( ( void * ) ( pxConstList )->pxIndex == ( void * ) &( ( pxConstList )->xListEnd ) ) \
{ \
( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext; \
} \
/* 从当前列表项中取出任务控制块 */ \
( pxTCB ) = ( pxConstList )->pxIndex->pvOwner; \
}2.3 任务就绪队列
FreeRTOS的任务调度本质是"从就绪队列中选择最高优先级的就绪任务并执行",而就绪队列正是通过"列表数组"实现的------每个优先级对应一个列表,存储该优先级的所有就绪任务。
2.3.1 就绪队列的定义
#define configMAX_PRIORITIES (32) // 最大优先级数(用户可配置)
List_t pxReadyTasksLists[configMAX_PRIORITIES ]; // 就绪队列数组2.3.2 就绪队列的初始化(prvInitialiseTaskLists)
static void prvInitialiseTaskLists( void )
{
UBaseType_t uxPriority;
// 初始化所有优先级的就绪队列
for( uxPriority = 0U; uxPriority < configMAX_PRIORITIES; uxPriority++ )
{
vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) );
}
// 初始化延迟任务队列、待就绪队列等
vListInitialise( &xDelayedTaskList1 );
vListInitialise( &xDelayedTaskList2 );
vListInitialise( &xPendingReadyList );
// 初始化任务删除等待队列(开启INCLUDE_vTaskDelete时生效)
#if ( INCLUDE_vTaskDelete == 1 )
{
vListInitialise( &xTasksWaitingTermination );
}
#endif
// 初始化任务挂起队列(开启INCLUDE_vTaskSuspend时生效)
#if ( INCLUDE_vTaskSuspend == 1 )
{
vListInitialise( &xSuspendedTaskList );
}
#endif
// 初始化延迟任务队列指针(双队列用于处理溢出)
pxDelayedTaskList = &xDelayedTaskList1;
pxOverflowDelayedTaskList = &xDelayedTaskList2;
}2.4 任务切换
调度器选择好下一个要执行的任务后,需要通过"任务切换"动作将CPU控制权交给新任务。这一过程涉及软件触发 和硬件异常处理 ,核心代码是vPortYield(触发切换)和xPortPendSVHandler(PendSV异常处理函数)。
2.4.1 触发任务切换(vPortYield)
void vPortYield( void )
{
/* 写入PendSV控制位,请求上下文切换 */
*( portNVIC_INT_CTRL ) = portNVIC_PENDSVSET;
/* 内存屏障指令,确保操作生效 */
__dsb( portSY_FULL_READ_WRITE );
__isb( portSY_FULL_READ_WRITE );
}这是一个软件触发任务切换的接口,核心动作仅一行:向ARM Cortex-M内核的NVIC_INT_CTRL(中断控制寄存器)写入portNVIC_PENDSVSET(PendSV异常挂起位)。
后续的__dsb(数据同步屏障)和__isb(指令同步屏障)是内存屏障指令,用于防止编译器或CPU乱序执行导致PendSV触发延迟,确保触发动作的可靠性。
2.4.2 执行任务切换(xPortPendSVHandler)
当PendSV异常被挂起后,CPU在当前指令执行完毕后会进入异常处理函数xPortPendSVHandler(汇编实现,因需直接操作CPU寄存器)。该函数的核心是"保存当前任务上下文→加载新任务上下文"。
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8 ; 确保栈对齐
mrs r0, psp ; 读取进程栈指针(任务使用进程栈)
isb
; 获取当前任务控制块指针
ldr r3, =pxCurrentTCB
ldr r2, [r3]
; 若任务使用FPU,保存FPU寄存器(Cortex-M4支持)
tst r14, #0x10
it eq
vstmdbeq r0!, {s16-s31}
; 保存当前任务核心寄存器(r4-r11、r14)
stmdb r0!, {r4-r11, r14}
; 将更新后的栈指针存入当前任务控制块
str r0, [r2]
; 调用任务切换上下文函数,选择新任务
stmdb sp!, {r3}
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb
isb
bl vTaskSwitchContext ; 核心:选择新任务,更新pxCurrentTCB
mov r0, #0
msr basepri, r0
ldmia sp!, {r3}
; 从新任务控制块中读取栈指针
ldr r1, [r3]
ldr r0, [r1]
; 恢复新任务核心寄存器
ldmia r0!, {r4-r11, r14}
; 若新任务使用FPU,恢复FPU寄存器
tst r14, #0x10
it eq
vldmiaeq r0!, {s16-s31}
; 更新进程栈指针,完成上下文切换
msr psp, r0
isb
; 异常返回,执行新任务
bx r14
}汇编代码看似复杂,核心逻辑可拆解为"保存旧任务→选择新任务→恢复新任务"三步:
-
保存当前任务上下文 : 读取进程栈指针(
psp,Cortex-M中任务运行在进程栈)。 -
若任务使用FPU(浮点运算单元),保存FPU寄存器(
s16-s31)。 -
保存任务的核心寄存器(
r4-r11,这些寄存器需任务自行保存)和链接寄存器(r14)。 -
将更新后的栈指针存入当前任务控制块(
pxCurrentTCB),确保下次恢复时能找到正确的栈位置。 -
选择新任务 :调用
vTaskSwitchContext函数(前文解析的"遍历就绪队列选择最高优先级任务"),更新全局变量pxCurrentTCB为新任务控制块。 -
恢复新任务上下文: 从新任务控制块中读取栈指针,恢复核心寄存器和FPU寄存器(若有)。
-
更新进程栈指针(
psp)为新任务的栈指针。 -
执行
bx r14(异常返回),CPU从新任务的栈中读取程序计数器(pc),开始执行新任务。