在日常生活中,您是否曾为找不到遥控器、钥匙或是一瓶水而烦恼?这类对人类颇具挑战的任务,对家庭服务机器人来说同样困难重重。传统机器人在动态环境中常因物体位置变化、隐藏空间检索效率低等问题,难以应对物品被移动或隐藏的复杂家庭场景。

如今,这一难题迎来重要突破!德国波恩大学研究团队基于Hello Robot移动操作机器人Stretch3 ,成功开发出一套名为Stretch-Compose的智能系统。该系统如同为机器人装上了"智慧大脑",融合空间记忆、语义理解与几何推理能力,使机器人能够像人一样"分析"与"判断",高效地在动态、杂乱甚至隐藏空间(如抽屉、柜子)中搜寻目标物体。
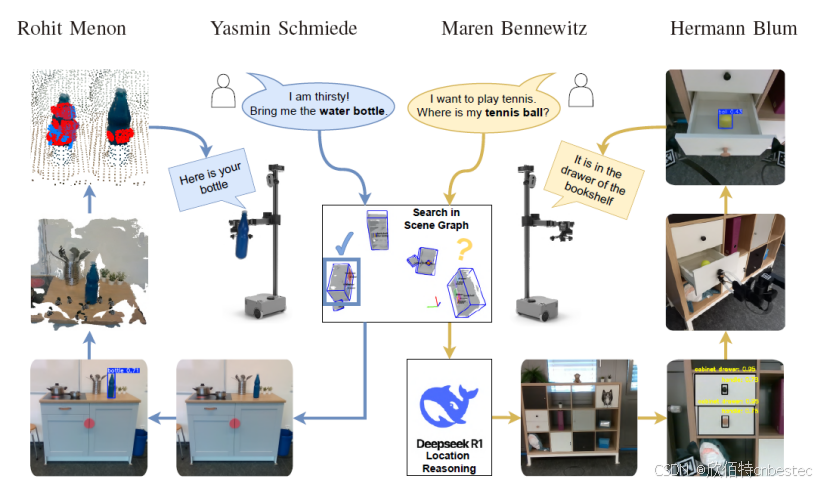
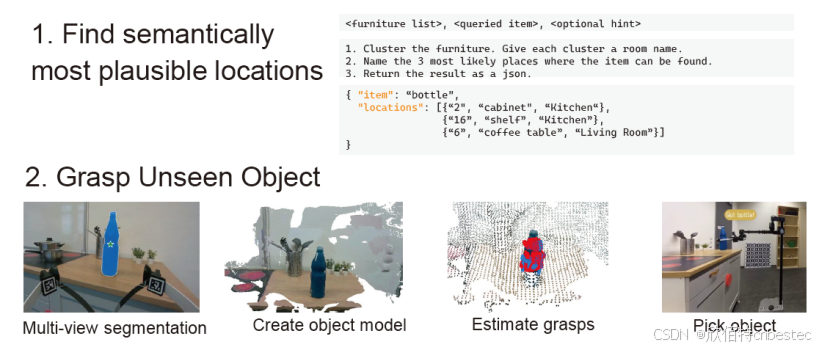
当用户发出"我的网球在哪?"的指令后,Hello Robot Stretch3首先会前往网球最后出现的位置进行搜寻(空间推理)。若未找到,系统启动"语义推理",询问内置大语言模型"网球最可能放在客厅的哪个家具上?",从而锁定潜在区域。
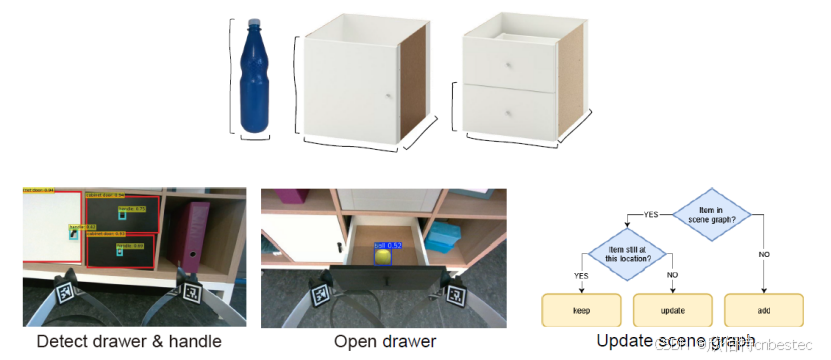
若目标仍未被发现,Hello Robot机器人将进一步启动"几何约束推理",判断物品是否被收纳入隐藏空间。该系统能智能排除不合理的容器(如网球不可能塞入铅笔盒),直接锁定可行抽屉并进行开柜检查。
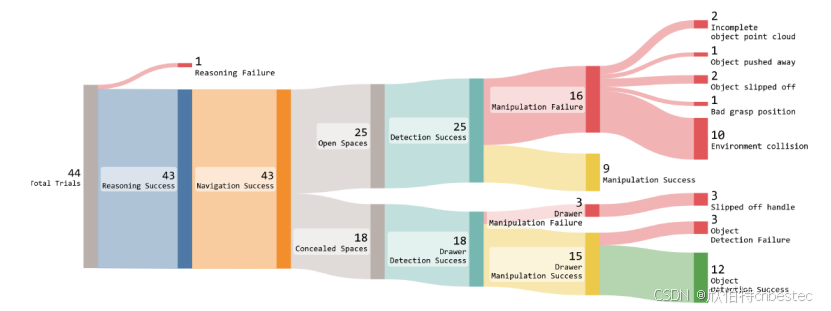
在44次真实场景测试中,Stretch3 机器人展现出卓越性能:导航与开放空间检测成功率达100%,语义推理准确率高达97.7%,多视角整合技术对隐藏物体的检出率达到80%。尤为重要的是,通过几何约束推理,隐藏空间搜索时间从平均412秒降至129秒,效率提升68%。
该成果不仅验证了Hello Robot 移动操作机器人 在开放词汇物体检索、动态场景图更新和移动操作 方面的顶尖能力,更凸显其作为具身智能科研平台 的重要价值,在养老助残、智能仓储、新零售等场景中具备广泛应用潜力。
素材来源:
德国波恩大学《Stretch-Compose: Compositional Reasoning for Open-Vocabulary Object Retrieval in Dynamic Environments》
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询++++sales@cnbytec.com++++