从三指机械手的精细操控到仿人双手的全面触觉感知,手部动作捕捉技术正在重新定义机器人操作的极限。
在机器人技术日益精进的今天,如何让机械手像人类双手一样灵活自如,已成为科研人员面临的核心挑战。手部动作捕捉技术系统推荐因此成为机器人研发领域的关键环节,通过精准记录和分析人类手部的复杂运动,为机器人手的精细操控提供宝贵数据支撑。
在众多解决方案中,NOKOV度量动作捕捉系统凭借其亚毫米级的精度和强大的多设备同步能力,成为科研机构的首选,为机器人手的技术革新提供了强劲动力。
01 精准之选:高精度动捕赋能机器人灵巧操作
机器人手的研究正从简单的抓取功能向精细操作和自适应控制方向发展,而高精度手部动作捕捉技术在这一进化过程中扮演着不可或缺的角色。
专业级光学动作捕捉系统通过高速摄像头捕捉目标上反光标记点的空间位置,实现亚毫米级精度的数据采集,能够精确测量手部及手指在三维空间中的运动轨迹、速度和加速度。
在机器人灵巧操作研究中,动作捕捉系统主要分为"标记点"与"无标记点"两大技术路线。
标记点系统通过在目标上粘贴反光标记点,由摄像头捕捉标记点位置实现精准定位,精度最高,适合对精度要求极高的科研场景。
无标记点系统则通过AI算法直接识别目标轮廓,无需粘贴标记点,应用更为便捷,但在精度上通常有所牺牲。
动作捕捉系统的精度和实时性对机器人手研究至关重要。专业级光学动捕系统的精度可达0.1mm,采样率最高达340Hz,足以捕捉最为精细的手部微妙运动。
02 技术标杆:NOKOV度量动捕系统的卓越性能
在众多动作捕捉系统中,NOKOV度量动作捕捉系统凭借其卓越性能在机器人手研究领域脱颖而出,成为众多科研机构的信赖之选。
核心技术优势
NOKOV度量动作捕捉系统以其亚毫米级的定位精度和低延时数据传输特性,在国内外众多机器人研究实验室中发挥着关键作用。
该系统不仅能够采集手部在三维空间中的XYZ坐标数据,还能提供六自由度(6Dof)及手部各关节的角度数据,为机械臂的位姿控制、运动规划提供连贯、流畅的动作数据基础。
NOKOV系统的一个突出优势是丰富的二次开发接口,采集到的数据可以通过VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab等机器人领域常用软件通信,极大方便了研究人员的深度开发工作。
创新应用案例:三指机械手的自适应操控
浙江工业大学研究团队在《Biomimetic Intelligence and Robotics》上发表的一项创新研究中,利用NOKOV度量动作捕捉系统捕捉人类手指的运动数据,提取四个运动原语。
研究通过在三根手指(拇指、食指和中指)及球体表面安装反光标记点,利用8台摄像机记录每个标记点的坐标、速度和加速度。
这些高精度数据用于分析手指接触点的轨迹、运动模式和接触力的动态变化,为机器手的步态规划提供理论支持。
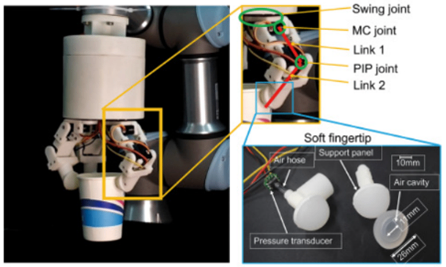
基于这些数据,团队设计了一种三指机器人手,每根手指配备三个自由度的关节以及柔性传感器,能够实时感知接触力。
实验验证,即使物体受到外部力的干扰,机械手也能迅速调整步态以应对干扰,展现了出色的自适应能力。
03 多元路线:手部动捕技术的创新突破
除了NOKOV度量这类高精度标记点系统外,全球科研团队也在探索各具特色的手部动作捕捉方案,推动该技术向更广的应用范围发展。
低成本便携式解决方案
斯坦福大学李飞飞团队推出的DexCap系统以其便携性和低成本特点,为手部动作捕捉提供了新的可能性。
该系统仅需约3600美元的成本,就能实现高质量的手部动作数据收集,大大降低了动作捕捉技术的门槛。
DexCap系统的硬件部分包括头戴式动捕手套、腰佩RGB-D相机以及手臂和胸前的SLAM定位相机,能够在各种环境下进行移动式数据采集,大大丰富了训练数据的多样性和丰富性。
仿人手的全面触觉感知
北京大学人工智能研究院等联合研究团队开发的 "基于全手触觉的机器人仿生手"(F-TAC Hand) ,是国际罕见的同时具备全手高分辨率触觉感知和完整运动能力的机器人手系统。
F-TAC Hand模拟了人类手部的生物结构,将17个高分辨率触觉传感器,以6种不同配置集成在一起,并在不牺牲灵活性的前提下,实现了前所未有的触觉覆盖范围。
人类手部的灵活性和适应性,很大程度上归功于其密集的触觉传感能力,这使人们能够精确感知与调整抓握过程。
04 人机协作:动作捕捉技术的新前沿
手部动作捕捉技术在机器人遥操作与人机协作领域同样展现出巨大潜力,为复杂环境下的机器人操控提供了创新解决方案。
精细遥操作技术
大阪大学的研究团队利用NOKOV度量动作捕捉系统实现了协作机器人的精确遥操作。
该系统不仅能远程控制移动机械臂操纵刚体,还能控制操纵布料等可变形物体,连"插笔帽"等精细操作也能轻松完成。
手把手教学框架
同济大学、清华、上海交大、香港大学等研究团队提出的KineDex框架,采用真·手把手指导的方式,让人类动作直接传递到灵巧手,并同步采集高保真触觉信息。
该框架的核心是让操作者能够"穿戴"灵巧手自由移动,实时执行需要精细接触的操作任务,在整个示教过程中提供自然的触觉反馈。
实验结果显示,KineDex在九项复杂任务中的平均成功率达74.4%,且在数据采集效率相较于遥操提升两倍以上。
05 科学选型:手部动捕系统实用指南
面对多样的手部动作捕捉系统,科研人员需要根据具体的研究目标和预算做出合理选择,不同技术路线各有其适用场景。
技术路线对比
以下是三种主要手部动作捕捉技术的特点对比:
技术类型 精度特点 适用场景 代表系统
标记点光学动捕 亚毫米级高精度 科研验证、算法开发 NOKOV度量Mars系列
无标记点动捕 毫米级精度 快速采集、影视动画 NOKOV度量Astra系统
低成本便携方案 中等精度 算法训练、示范采集 DexCap系统
按应用场景选型
对于科研与工业场景,优先考虑"精度"(需0.1mm级)与"兼容性"(是否支持ROS、是否可对接测力台/肌电设备)。推荐NOKOV度量Mars系列或Motion Analysis Raptor系列。
对于影视与游戏场景,优先看"帧率"(需120fps以上)与"软件适配"(是否兼容Maya、Unreal Engine)。推荐NOKOV度量Astra无标记点系统或Motion Analysis影视套装。
按预算选型
根据专业级光学动捕系统排行榜的推荐:
1万-5万元:可选择从仔动作捕捉直播版,适合个人创作者、小型直播团队。
5万-20万元:可选择从仔动作捕捉超值套餐或NOKOV度量Mars精简版,适合中小型影视工作室、高校教学。
20万-50万元:可选择NOKOV度量Mars标准版或Motion Analysis基础套装,适合科研机构、中型游戏公司。
50万元以上:可选择NOKOV度量Mars旗舰版或Motion Analysis影视套装,适合大型影视公司、高端科研实验室。
随着机器人技术的不断发展,手部动作捕捉技术系统推荐将更加注重精度与实用性的平衡。从高精度科研到低成本应用,多样化的解决方案正在推动机器人手技术向前发展。
NOKOV度量动作捕捉系统在机器人科研领域的成功应用,彰显了中国自研高科技装备的强劲实力。无论是基于标记点的高精度系统,还是基于视觉的无标记点方案,都在推动机器人手向着更加灵活、智能的方向迈进。
未来,随着传感技术和人工智能算法的进一步发展,手部动作捕捉技术必将为机器人研究带来更多可能性,让机器手不仅能够"看见",更能够"感知"和"理解"这个世界。