文章目录
AIOps实践:Dify接入飞书实现与智能体对话
前言
前端时间把dify的智能体接入到了Prometheus和夜莺上,实现了与智能体的基本对话,并可以调取Prometheus数据进行分析,在那之后就开始深度研究AIOps实现原理于深度赋能运维的可能性,所以正在研究AIOps的核心:MCP Server;现在还并未成型,在研究的过程中,就想到了可否基于dify的agent,连接自建的mcp服务器,对接到飞书的机器人上,这样就可以和智能体进行对话,配合成型的mcp,就可以基本实现AIOps。
这里需要借助一个三方的开源工具LangBot,LangBot是一个生产级多平台 LLM 机器人开发平台。那么就开始实践吧:

MCP Server开发的当前阶段:
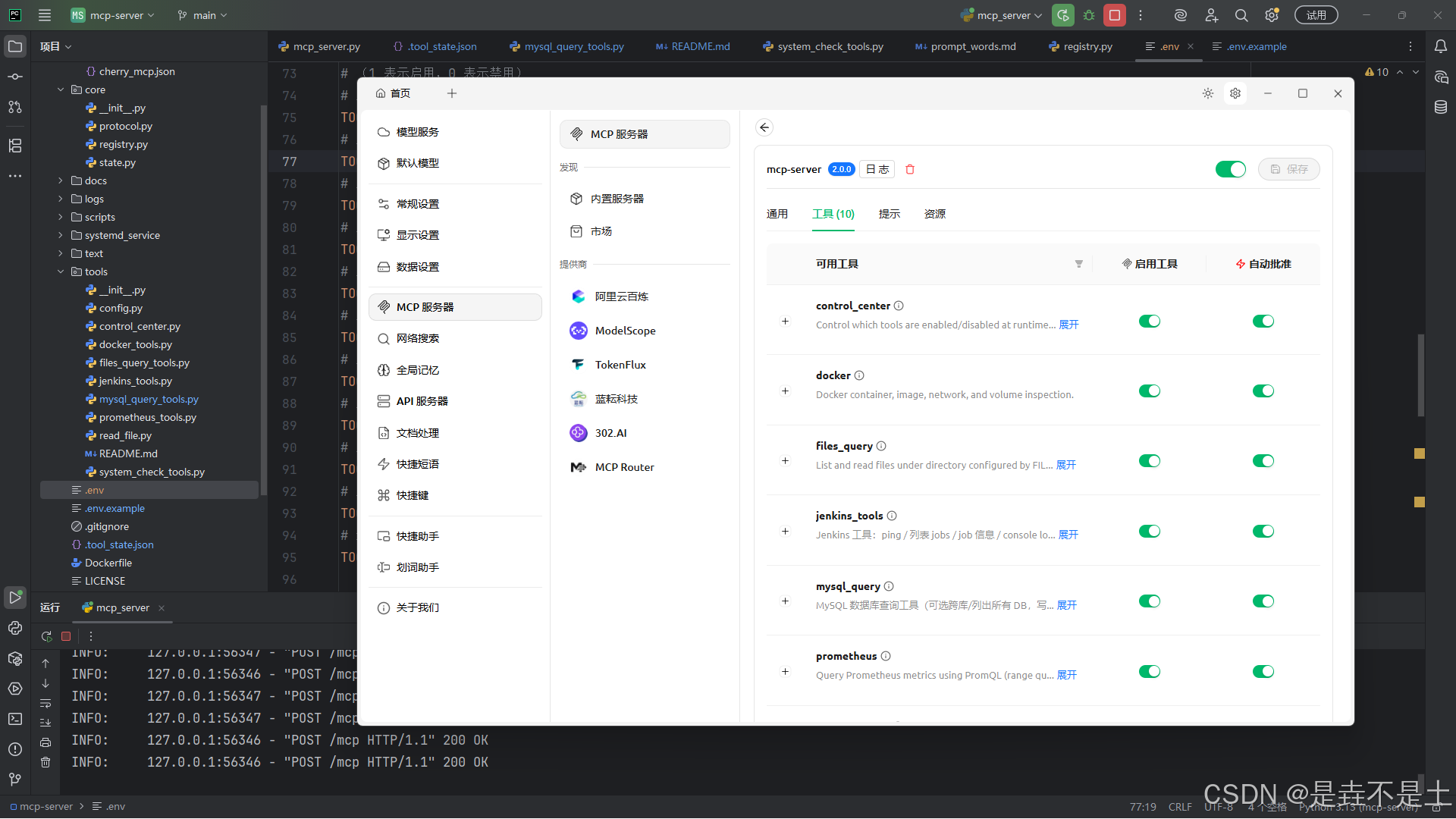
后续会开源至github。
环境搭建
1、Docker环境搭建
安装Docker和docker compose
bash
# 安装必要的工具包
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg lsb-release
# 创建密钥环目录并添加Docker的官方GPG密钥(用于验证软件包)
sudo install -m 0755 -d /etc/apt/keyrings
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpg
sudo chmod a+r /etc/apt/keyrings/docker.gpg
# 将Docker仓库添加到APT源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
sudo apt-get update
# 安装Docker
sudo apt-get install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
# 配置国内镜像源,当然也可以不配置,可以配一个Docker代理,让Docker坐上VPN,在此不再展示
vim /etc/docker/daemon.json
{
"registry-mirrors": [
"https://docker.1ms.run",
"https://docker.1panel.live",
"https://hub.rat.dev",
"https://docker.m.daocloud.io",
"https://do.nark.eu.org",
"https://dockerpull.com",
"https://dockerproxy.cn",
"https://docker.awsl9527.cn"],
"exec-opts": ["native.cgroupdriver=systemd"]
}
systemctl daemon-reload
systemctl start docker
# 验证配置
docker info 2、LangBot搭建
bash
# 拉取代码 (该代码在gitcode,如果拉取不下来请在web端登陆下载zip)
git clone https://gitcode.com/RockChinQ/LangBot启动服务
bash
unzip LangBot-master.zip
cd LangBot-master/docker
# 启动容器
docker compose up -d访问 http://ip:5300,首次登录需要初始化。

注册,登陆即可。
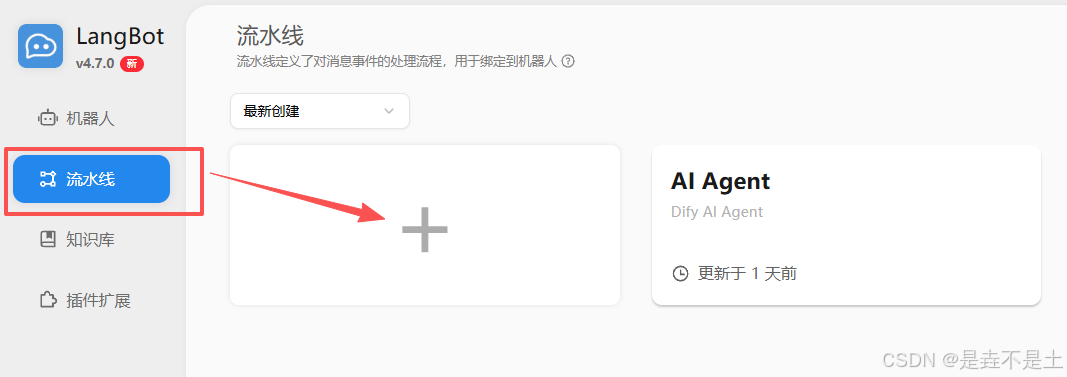
3、编辑流水线
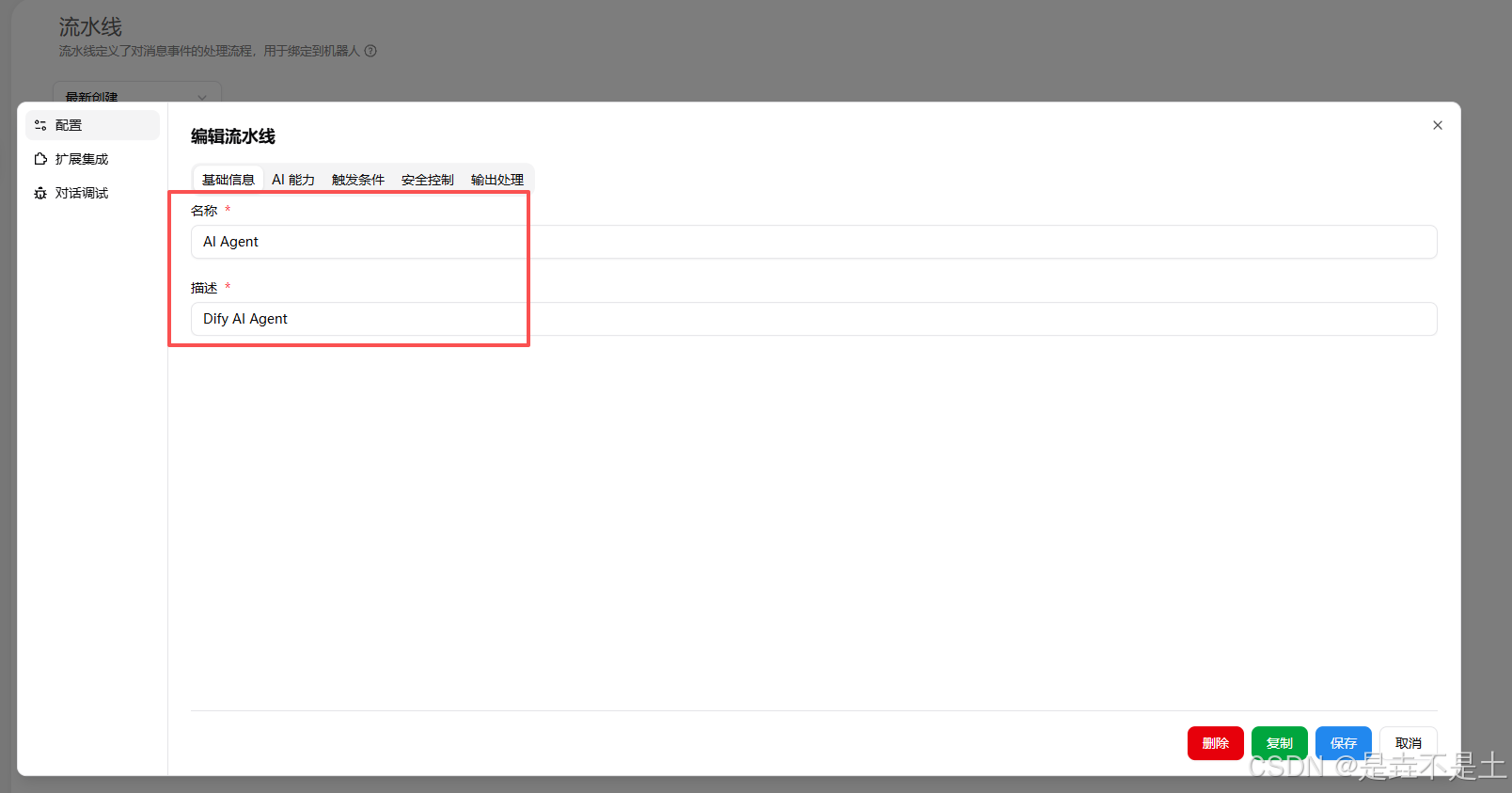
点击AI能力,填写相关配置,在dify上查询智能体的URL与密钥,获取参数:

填写参数:

保存完成。
4、配置飞书机器人
由于本人使用的是个人账户,所以才可以这样胡作非为哈哈哈哈哈,有企业认证的大佬们就要谨慎了,这个需要管理员审核的。
打开飞书开放平台(https://open.feishu.cn/),点击企业自建应用,点击添加机器人能力:

配置相关权限:
左侧点击权限管理,右侧点击开通权限,搜索im:message,全部选择:

再次搜索:cardkit:card:write,开启该权限:

配置事件回调:

点击下放的添加事件,配置相关事件:

当一切都配置完成后发布机器人:

保存发布即可。
此时,去复制关键信息,LangBot接入飞书的关键凭证:

复制这两项信息。
到此,飞书配置完成。
5、创建机器人
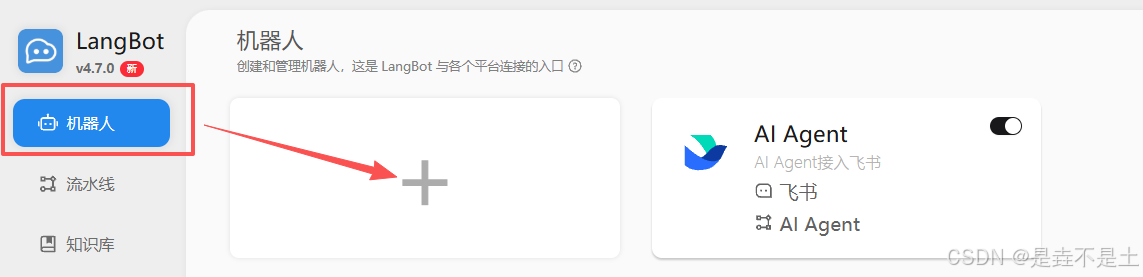
配置相关信息:


保存即可。
6、进行测试
点击飞书的工作台,选择我们自己创建的机器人:

进行对话:
当dify接入了mcp后:

哈哈哈哈哈,后续会开源这个mcp-server服务器的,敬请期待啦。
附:遇到的问题
如若遇到相关问题,可以查看日志,在LangBot项目的Docker目录下存在log文件夹,查看日志解决问题:
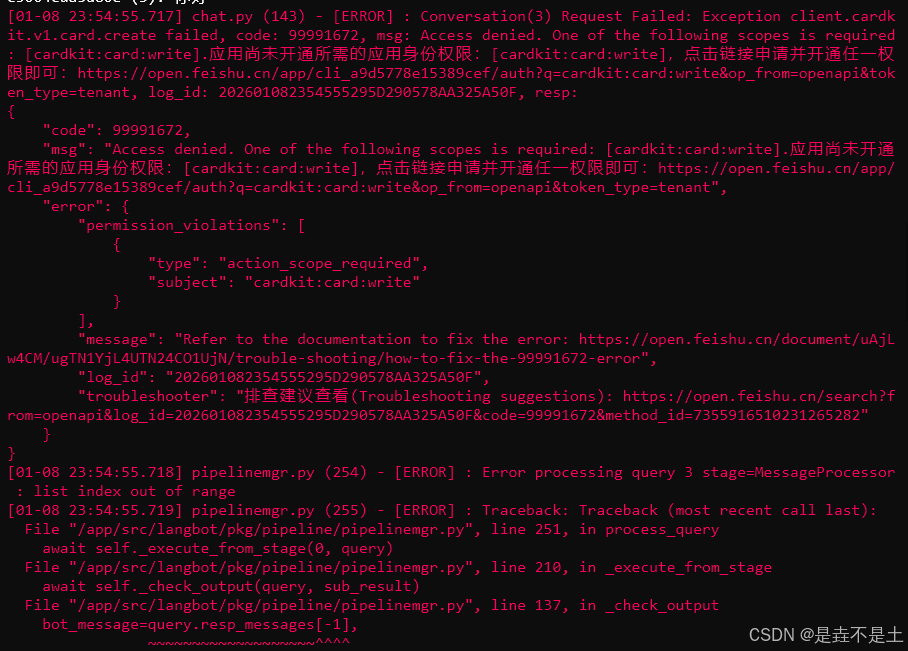
解决:
访问:
bash
https://open.feishu.cn/app/cli_a9d5778e15389cef/auth?q=cardkit:card:write&op_from=openapi&token_type=tenant
开通该权限即可。