调整 ORB 算法参数的核心逻辑是 **"匹配场景需求(如速度 / 精度、图像特性)"**------ 不同图像(如纹理密度、尺度差异、噪声水平)和任务目标(如实时跟踪 / 高精度拼接),需要针对性优化参数。以下结合 cv2.ORB_create(nfeatures=2000, scaleFactor=1.2, patchSize=31) 中的关键参数,分场景给出调整策略,并补充 ORB 其他核心参数的优化方法。
一、先明确:调整参数的核心目标
所有参数调整围绕两个核心权衡:
- 精度 vs 速度:更多特征点、更精细尺度、更大邻域窗口会提升匹配精度,但增加计算量(变慢);
- 鲁棒性 vs 噪声:更大窗口、更高阈值能抵抗噪声 / 模糊,但可能丢失细节特征。
二、核心参数调整策略(分场景)
以下按 ORB 最关键的 4 个参数(nfeatures、scaleFactor、patchSize、edgeThreshold)展开,结合不同图像特性给出具体方案。
1. nfeatures:最大特征点数量(默认 500)
作用:控制提取的特征点总数,直接影响匹配候选数量和计算速度。
调整逻辑 :根据图像的纹理密度选择 ------
- 纹理稀疏图像(如纯色背景、简单物体:白墙前的杯子):需增大
nfeatures(如 1500~3000),避免特征点不足导致匹配失败。例 :nfeatures=2500(原参数 2000 可满足,若仍匹配少则继续上调)。 - 纹理密集图像(如树叶、文字、复杂场景:街道全景):需减小
nfeatures(如 500~1000),避免冗余特征点拖慢速度(多余特征点对匹配精度提升有限)。例 :若原参数 2000 导致实时跟踪卡顿,可降至nfeatures=800。 - 注意:并非越多越好 ------ 超过图像实际可提取的特征点数量(如纯色图设 10000),只会浪费计算资源,不会增加有效特征。
2. scaleFactor:图像金字塔缩放因子(默认 1.2)
作用 :控制多尺度特征检测的精细度 ------ORB 通过构建 "图像金字塔"(按比例缩小图像),检测不同尺度下的特征点(如远处小物体和近处大物体的特征)。调整逻辑 :根据图像的尺度差异选择 ------
- 尺度差异大的场景(如同时包含近处大物体和远处小物体:室内 + 窗外远景):需减小
scaleFactor(如 1.05~1.15),让金字塔层数更多、尺度划分更精细,避免漏检小尺度特征。例 :原参数 1.2 可能漏检远处小物体,可调整为scaleFactor=1.1(代价:金字塔层数增加,速度变慢)。 - 尺度差异小的场景(如固定距离拍摄的物体:证件照、产品特写):可增大
scaleFactor(如 1.2~1.5),减少金字塔层数,提升速度(无需精细尺度)。例 :若拍摄固定角度的零件图像,scaleFactor=1.3足够,且比 1.2 更快。 - 范围限制:
scaleFactor必须 > 1(否则金字塔层会重复),通常建议 1.05~1.5(过小会导致计算量激增)。
3. patchSize:描述子计算的邻域窗口大小(默认 31,需为奇数)
作用 :以特征点为中心,取 patchSize×patchSize 的像素块计算 BRIEF 描述子,窗口越大,对局部变形 / 模糊 / 噪声 的抵抗能力越强。调整逻辑 :根据图像的噪声水平和细节需求选择 ------
- 噪声多 / 模糊的图像(如低分辨率图、运动模糊图、暗光拍摄图):需增大
patchSize(如 35~45),通过更大窗口平均噪声,提升描述子的稳定性。例 :原参数 31 在模糊图像中匹配率低,可调整为patchSize=39。 - 细节丰富 / 高分辨率图像(如清晰的纹理图、文字图):可减小
patchSize(如 21~29),避免大窗口 "覆盖过多无关像素",丢失细节特征(如文字的笔画边缘)。例 :若检测印刷文字的特征,patchSize=25比 31 更能精准捕捉笔画细节。 - 匹配一致性:若用于两幅图像的匹配 (如拼接、目标定位),需确保两幅图使用相同的
patchSize,否则描述子维度不匹配。
4. 补充关键参数:edgeThreshold(边缘阈值,默认 31)
作用 :过滤边缘附近的特征点 ------ 边缘处的特征点稳定性差(易受光照 / 视角变化影响),edgeThreshold 控制 "距离边缘多少像素内的特征点会被过滤"。
调整逻辑 :与 patchSize 联动,通常设为 等于或略大于 patchSize(避免特征点太靠近边缘,导致计算描述子时窗口超出图像范围)。
- 若
patchSize=31,建议edgeThreshold=31或35(默认 31 已匹配); - 若
patchSize增大到 39,edgeThreshold需同步增大到 39~43(否则边缘特征点会被误过滤)。
三、不同场景的完整参数示例
结合实际需求,给出 3 类典型场景的参数配置,对比默认值和优化值:
| 场景类型 | 图像特点 | 核心需求 | 优化参数配置(cv2.ORB_create) | 原参数(对比) |
|---|---|---|---|---|
| 1. 纹理稀疏 + 小目标检测 | 纯色背景、远处小物体(如监控) | 多特征点、细尺度 | nfeatures=2500, scaleFactor=1.1, patchSize=35, edgeThreshold=35 |
nfeatures=2000, scaleFactor=1.2, patchSize=31 |
| 2. 纹理密集 + 实时跟踪 | 复杂场景、实时要求高(如无人机) | 快速度、少冗余 | nfeatures=800, scaleFactor=1.3, patchSize=27, edgeThreshold=27 |
nfeatures=2000, scaleFactor=1.2, patchSize=31 |
| 3. 噪声多 + 模糊图像 | 低分辨率、运动模糊(如老照片) | 抗噪声、稳匹配 | nfeatures=1800, scaleFactor=1.15, patchSize=41, edgeThreshold=41 |
nfeatures=2000, scaleFactor=1.2, patchSize=31 |
四、调试技巧:如何验证参数是否合适?
调整后需通过特征点可视化 和匹配率统计验证效果:
-
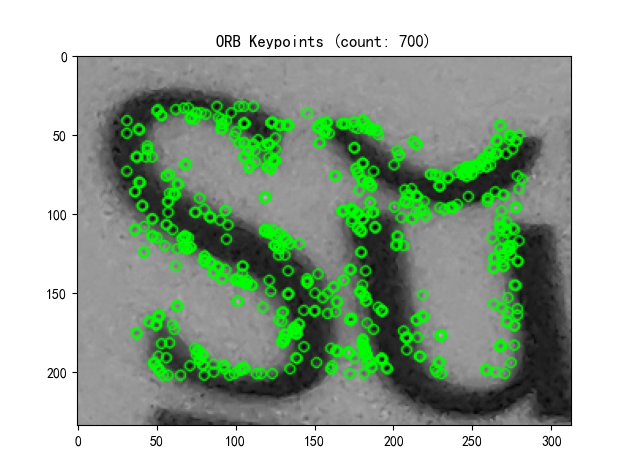
步骤 1:提取特征点并可视化
运行
import cv2 import matplotlib.pyplot as plt # 读取图像 img = cv2.imread("test.jpg", 0) # 0表示灰度图(ORB推荐输入灰度图) # 创建ORB实例(使用调整后的参数) orb = cv2.ORB_create(nfeatures=2500, scaleFactor=1.1, patchSize=35) # 检测特征点 kp = orb.detect(img, None) # 只检测特征点,不计算描述子 # 绘制特征点(drawKeypoints:可视化特征点位置和方向) img_kp = cv2.drawKeypoints(img, kp, None, color=(0,255,0), flags=0) # 显示结果 plt.imshow(img_kp, cmap="gray") plt.title(f"ORB Keypoints (count: {len(kp)})") plt.show()
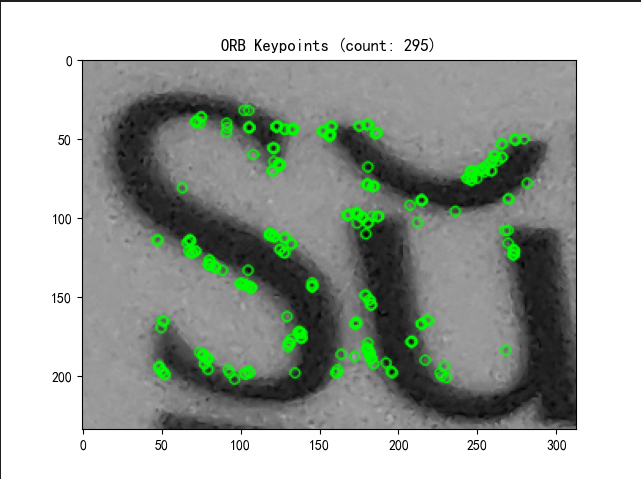
**验证标准:**特征点均匀分布在 "有意义区域"(如物体边缘、纹理处),无大量集中在背景或边缘的无效点。
例如,修改参数后的不同效果:
步骤 2:计算匹配率(针对两幅图像的匹配场景)
运行
# 读取两幅待匹配图像
img1 = cv2.imread("img1.jpg", 0)
img2 = cv2.imread("img2.jpg", 0)
# 提取特征点和描述子
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
# 暴力匹配器(ORB描述子为二进制,用汉明距离)
matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
matches = matcher.match(des1, des2)
# 计算匹配率(有效匹配数 / 总特征点数的较小值)
match_rate = len(matches) / min(len(kp1), len(kp2))
print(f"匹配率: {match_rate:.2f}")
# 可视化匹配结果
img_match = cv2.drawMatches(img1, kp1, img2, kp2, matches, None, flags=2)
plt.imshow(img_match)
plt.show()- 验证标准:匹配率 > 0.3(根据场景调整,如拼接需更高),且匹配点无明显错误(如跨物体匹配)。
总结
ORB 参数调整的本质是 "按需权衡":
- 追求精度 / 鲁棒性 :增大
nfeatures、减小scaleFactor、增大patchSize; - 追求速度 / 实时性 :减小
nfeatures、增大scaleFactor、减小patchSize; - 最终需通过 "可视化 + 匹配率" 验证,确保参数适配具体图像和任务。