- 研究背景与挑战生物启发基础:人类触觉感知系统(HTPS)中的帕西尼小体(PCs) 是深层皮肤机械感受器,对40-50 Hz 以上高频振动敏感(最敏感频率≈200 Hz),可将多维机械力(法向 + 切向)转化为电信号,是人类感知粘滑、往复滑动的核心结构。现有技术局限:当前人工触觉传感系统(ATSSs)多聚焦于法向压力检测(如硬度、形状识别),但在切向力感知、粘滑状态区分及移动物体轨迹追踪方面能力薄弱,导致机器人在智能抓取、危险响应(如物体即将滑落预警)与人机交互中性能受限。研究目标:通过仿生 PC 的结构与功能,开发具有高频率响应、高切向灵敏度的人工触觉传感器,突破 ATSSs 的多维感知瓶颈。2. APC 的设计、制备与结构表征
3.2 力学特性各向异性力学行为:轴向刚度高(40% 应变下应力 3.005 kPa),径向弹性好(70% 应变下应力 2.127 kPa),弹性模量轴向 1.59 kPa、径向 0.83 kPa,塑性变形仅 0.27%,确保切向力下结构可逆变形。负泊松比:压缩时径向收缩(而非传统材料的膨胀),最低值达 - 0.496,源于多层堆叠结构的不均匀压缩接触,进一步增强切向变形时的层间相互作用。4. APC 的粘滑检测与多维触觉感知4.1 粘滑状态识别机制静态摩擦阶段(Fₜ≤μFₙ,μ 为摩擦系数):切向力导致层状结构单向屈曲,MXene 层间接触面积增大→导电通路增强→电阻(R)急剧下降;此时 ΔR/R₀与切向力的相关性(r=0.86±0.09)远高于法向力(r=0.19±0.03),实现切向力的特异性检测。滑移阶段(Fₜ>μFₙ):静态摩擦储存的弹性势能快速释放→层状结构恢复→MXene 层间接触面积减小→电阻高频振荡;振荡频率(f)与滑动速度(v)满足 f=v/λ(λ 为表面微凸体尺寸),如 20 mm/s 快速滑动对应 100-150 Hz 高频信号,1 mm/s 慢速滑动对应低频信号,可通过频率特征识别滑动速度。4.2 多维触觉事件区分静态接触:加载 / 卸载时 ΔR/R₀突变,稳态阶段信号稳定(无振荡)。滑移事件:瞬时单峰信号,峰值幅度高于静态接触(因切向力骤变)。
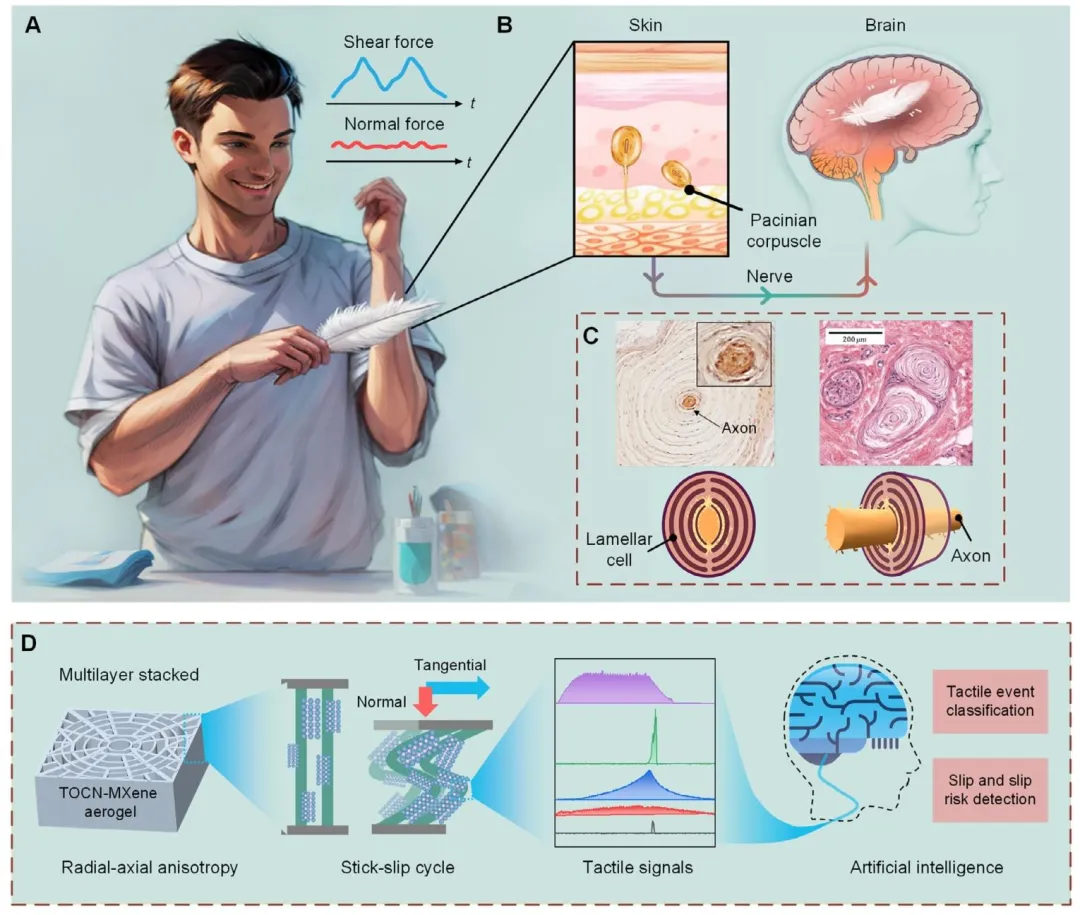
图1 帕西尼小体(PC)与人工帕西尼小体(APC)的结构及功能 A)羽毛滑动作用下人体触觉感知的示意图。人体图像基于作者手绘草图,使用ComfyUI(v0.3.59版本)结合Stable Diffusion 3与rpg_V4模型生成(访问时间:2024年10月),内容由作者指导并审核。 B)帕西尼小体(PC)的放大示意图:PC位于真皮层,对振动敏感,可实现机电转换功能。 C)左上角:人体手掌腱膜中帕西尼小体(PC)的切片图像,显示Piezo2蛋白的定位情况,插图为核心处的轴突;右上角:人体皮肤切片中的帕西尼小体(PC)簇(经许可转载30,2018年,Springer出版社);底部:帕西尼小体(PC)内部区域的正视图与侧视图示意图。 D)本研究设计的触觉传感器:基于TOCN-MXene气凝胶的人工帕西尼小体(APC)可实现触觉事件分类及滑移/滑移风险检测。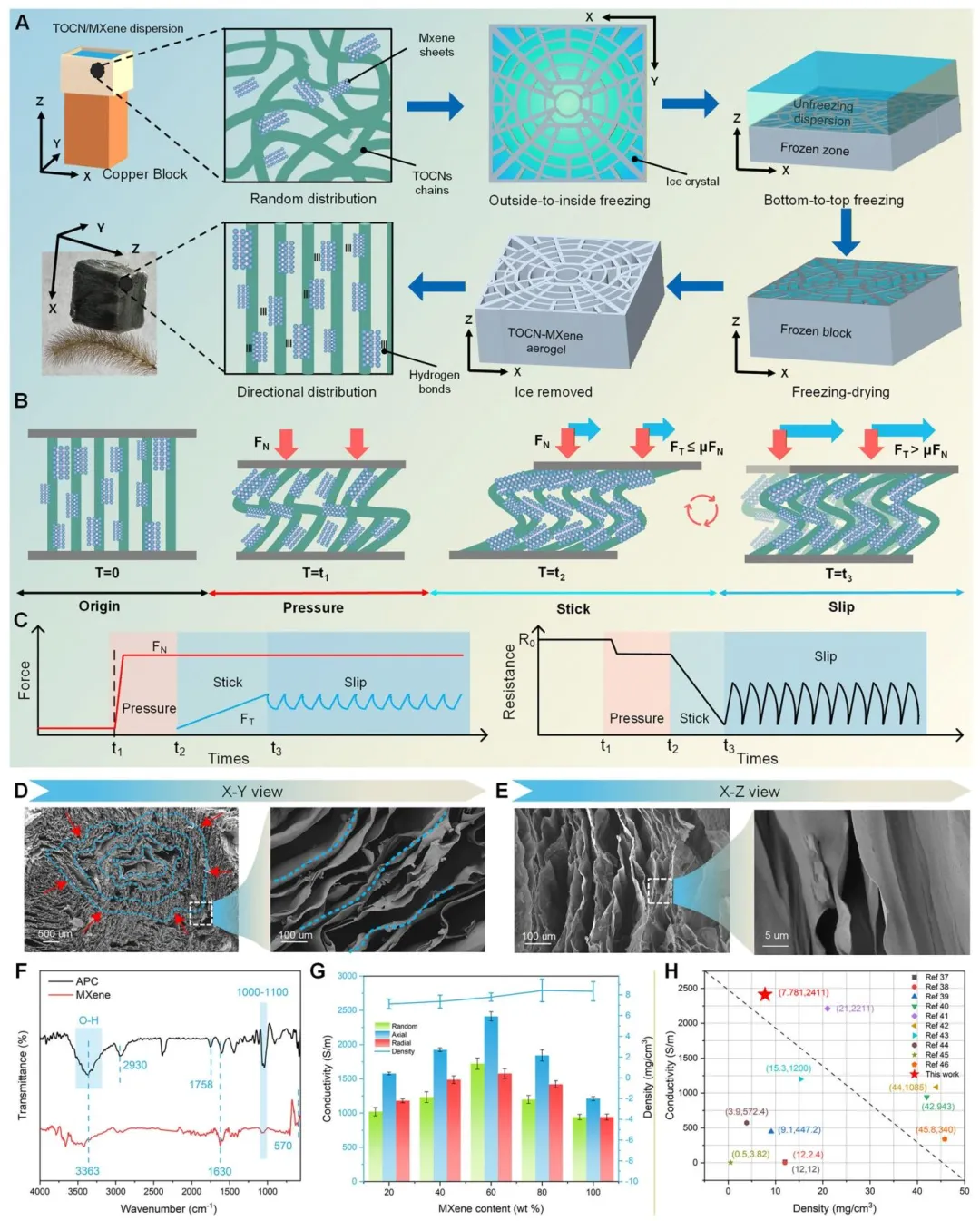
图2. 人工帕西尼小体(APC)的制备、作用机制及表征 A)APC的制备过程示意图。将APC置于狗尾草(Setaria viridis)上,以展示其超轻特性。 B)APC仿生层状结构在外力作用下的变形过程,涉及无载荷状态(T=0)、法向力作用状态(T=t₁)、切向力作用下的粘滞状态(T=t₂)及滑移状态(T=t₃)。 C)不同变形过程中法向力与切向力的变化(左图),以及APC对应的电阻响应(右图)。 D)APC在X-Y平面(径向)的扫描电子显微镜(SEM)图像;E)APC在Y-Z平面(轴向)的SEM图像。 F)MXene材料与APC的傅里叶变换红外(FT-IR)光谱。 G)不同MXene含量下,APC及对照样品的轴向与径向电导率。折线图代表APC的密度;误差线代表5次密度测量结果的标准差(SDs)。 H)本研究制备的APC与已有文献报道气凝胶在电导率和密度方面的对比分析。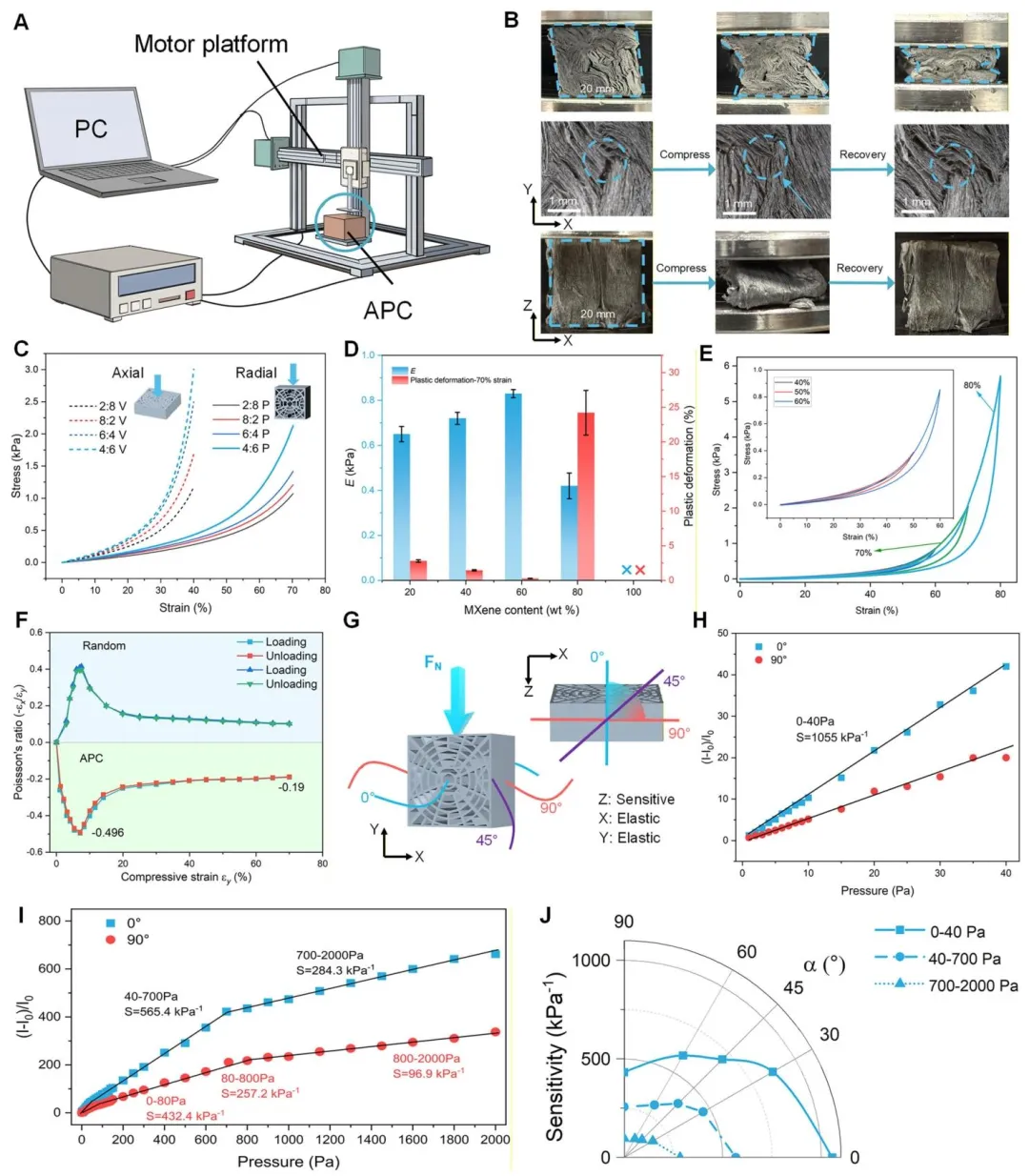
图3. 人工帕西尼小体(APC)的力学性能与压阻性能 A)用于测量APC力学性能与压阻性能的定制化测试平台示意图。 B)APC在径向压缩下的变形图像(上图)、径向压缩与恢复过程中的金相显微镜图像(中图,比例尺:1毫米),以及轴向压缩与恢复过程中的变形图像(下图)。 C)不同MXene含量(20%、40%、60%、80%)的APC在轴向与径向压缩下的应力-应变曲线。 D)轴向压缩(应变70%)条件下的弹性模量(E)与塑性变形。误差线代表5次测量中弹性模量(E)与塑性变形的标准差(SDs)。 E)APC在应变高达80%的循环加载下的滞后曲线。插图:应变高达60%的循环加载下的滞后曲线。 F)APC及对照样品在应变高达70%的加载-卸载循环中泊松比(Poisson's ratio)的变化。 G)APC方向敏感性示意图:沿y轴施加径向压缩时,在0°(z轴方向)灵敏度最高,且随测量方向向90°(x轴方向)旋转而降低。 H)沿0°方向,APC在0-40帕压力下的相对电流变化((I-I₀)/I₀)与力灵敏度;I)沿0°和90°方向,APC在0-2000帕全压力范围内的相对电流变化与力灵敏度。 J)不同压力与方向角(最高90°)下灵敏度的极坐标图。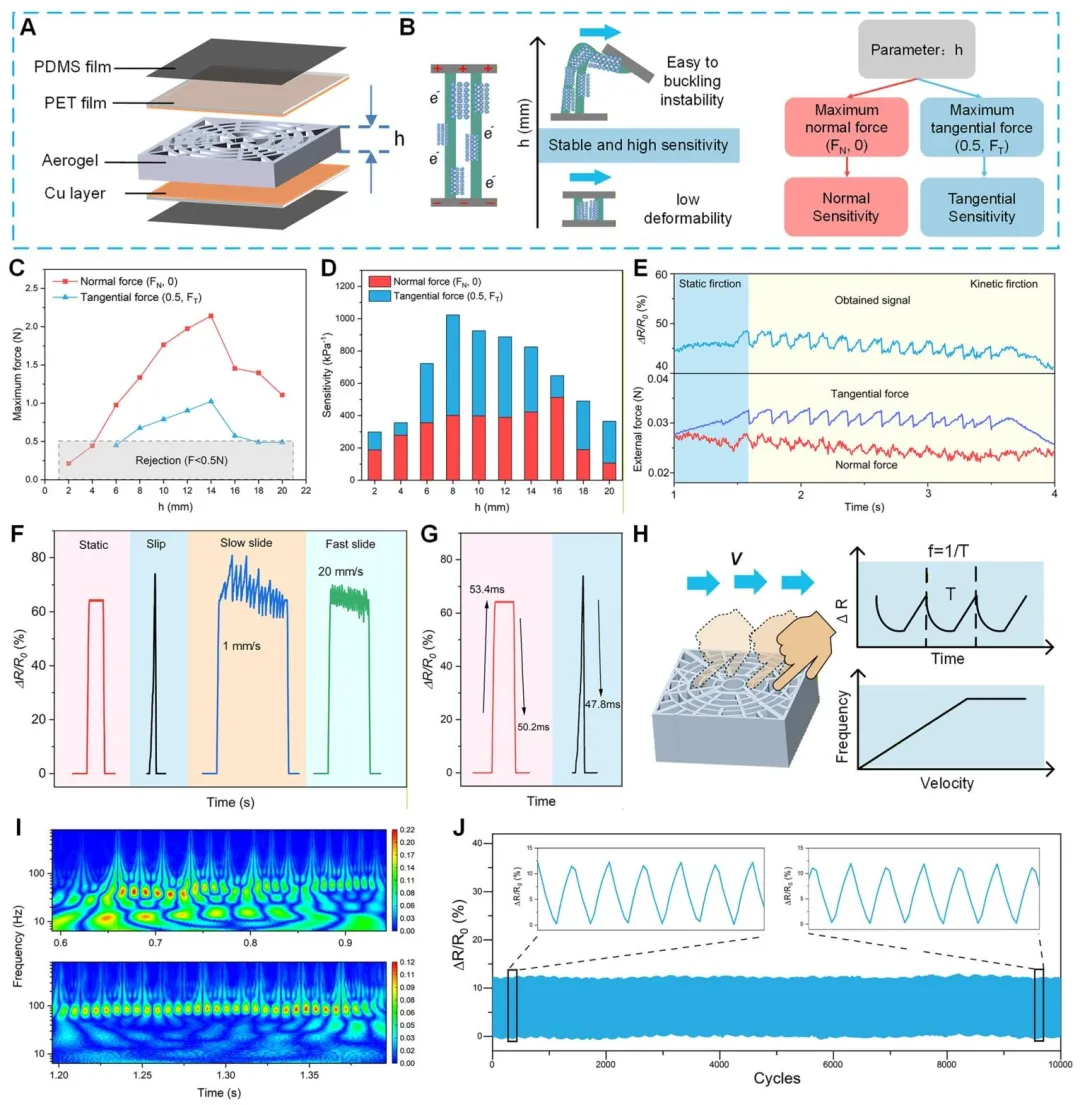
图4. 人工帕西尼小体(APC)传感器用于粘滑触觉传感的增强型切向灵敏度 A)APC传感器结构示意图。 B)(左图)结构高度(h)调控切向灵敏度的机制示意图,用于确定APC传感器的最佳高度;(右图)不同高度的APC在法向力与切向力作用下的灵敏度及承载能力测试结果。 C)不同高度APC样品的最大法向与切向承载能力;D)不同高度APC样品的灵敏度。图中高亮显示了不合格区域。 E)触觉传感器在完整滑动周期内测得的加载力(法向力与切向力)及ΔR/R₀(%)信号。 F)APC传感器对静压力、滑移、慢速滑动(≈1毫米/秒)及快速滑动(20毫米/秒)的响应。 G)APC传感器在静压力与动态滑移下的响应时间与松弛时间。 H)滑移速度(v)与特征频率(f)之间关系的示意图。 I)慢速滑动(上图)与快速滑动(下图)下APC信号的时频图谱。 J)耐久性测试中,APC传感器在10000次周期性加载(滑移速度20毫米/秒)下的ΔR/R₀(%)变化。

图5. 用于时空传感的APC阵列触觉系统 A)含4×4 APC传感器的触觉系统示意图,该系统模仿人类皮肤中的帕西尼小体(PC)簇。 B)APC阵列可区分乒乓球的滑动与滚动运动。 C)空间响应结果体现其多项功能:i)物体形状识别、ii)静摩擦检测、iii)高频振动传感(D4单元:40赫兹;B2单元:20赫兹);APC触觉系统的时空响应还可实现iv)滚动轨迹实时追踪与v)定向滑动运动监测。 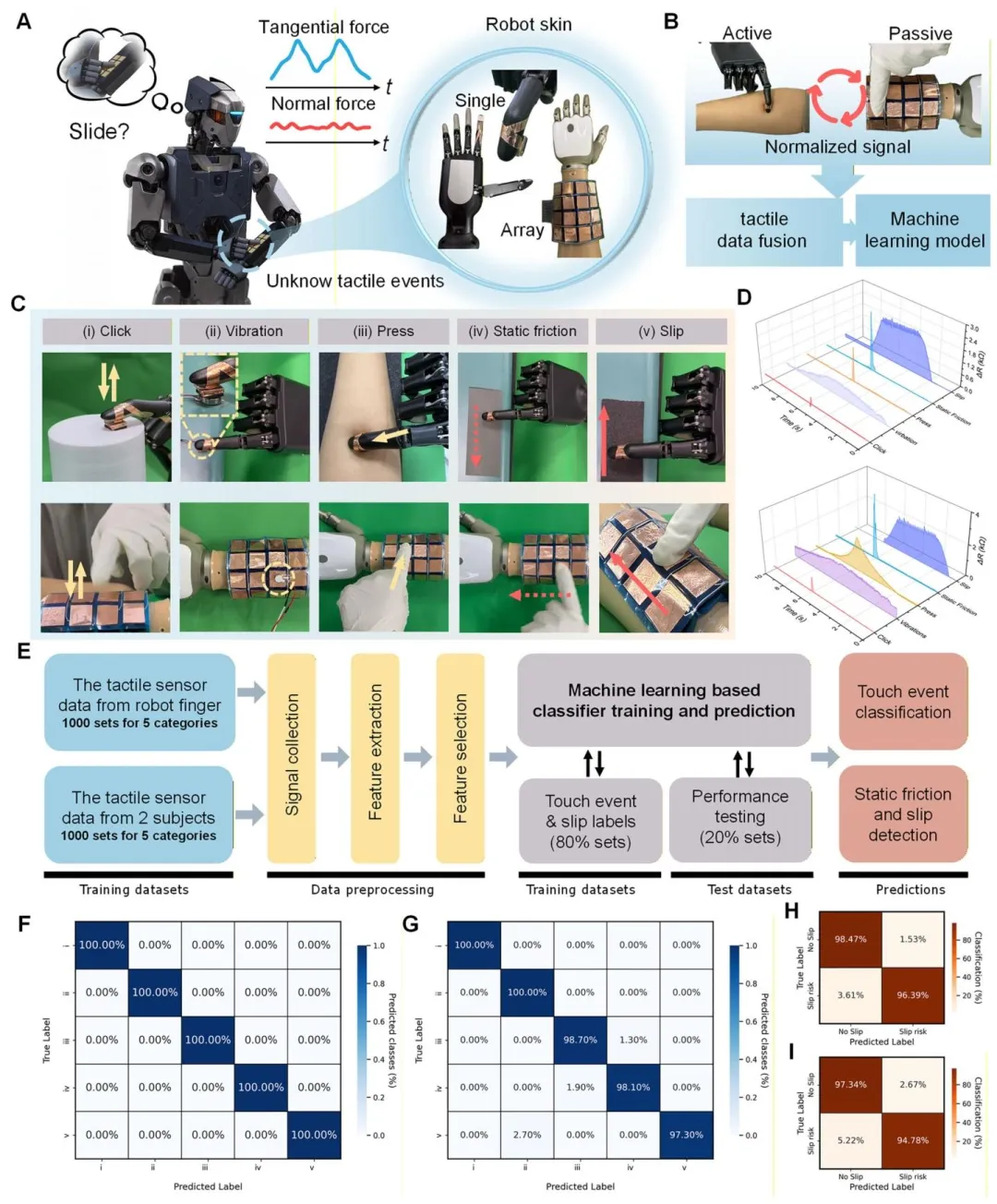
图6. 多维触觉感知增强人机交互 A)搭载APC系统以实现多维触觉传感的仿人机器人示意图。 B)搭载单个APC传感器的机器人手指(用于采集主动触觉信号),以及搭载APC传感器阵列的机器人手臂(用于感知被动触觉信号)。归一化信号经融合与标注后,用于机器学习模型训练。 C)在主动与被动触觉传感中,可检测五种触觉事件,包括点击、振动、按压、静摩擦及滑移。 D)人机交互中不同动作对应的电阻变化信号图。 E)流程图展示:用于触觉事件分类及静摩擦、动态滑移检测的数据处理与机器学习实现流程。 F)机器人手指主动交互时,五种触觉事件分类的混淆矩阵,准确率达100%。 G)机器人手臂被动交互时,触觉事件分类的混淆矩阵,平均准确率达98.82%。 H)主动交互中静摩擦与动态滑移检测的混淆矩阵,平均准确率为97.43%;I)被动交互中静摩擦与动态滑移检测的混淆矩阵,平均准确率为96.06%。原文链接:https://doi.org/10.1002/advs.202517884