引言
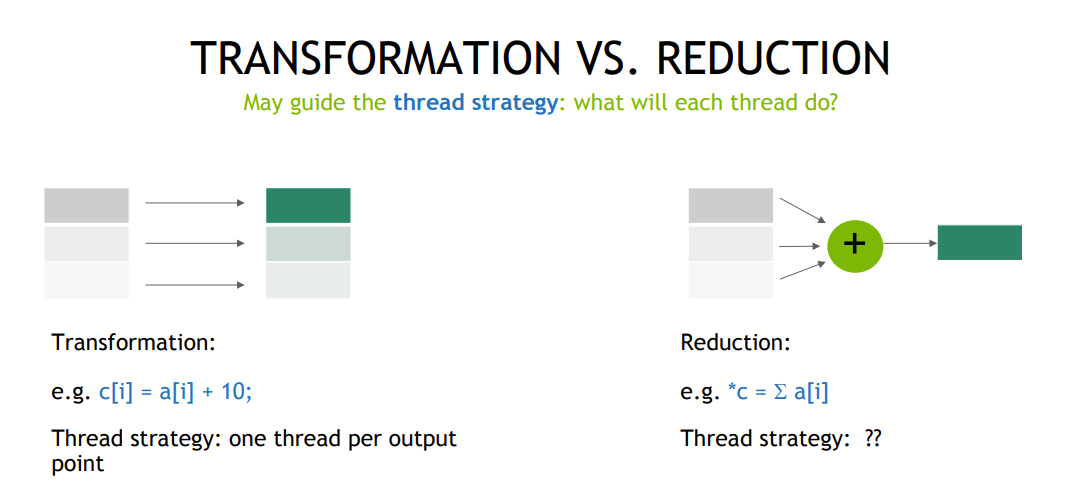
前几节处理的问题, 最终一个线程都会对应输出一个结果。今天将讨论的问题, 多个线程将会对应输出一个,或者少于启动线程数量的结果, 称之为 归约(Reduction)。
几种归约方法的实现
以实现求和方法为例,下面列出几种 归约的实现
1.使用 Cuda API 的原始操作
关键API
float atomicAdd(float* address, float val); 这里 Cuda 也有提供其他数据类型的 加法的原子操作, 可以详见
https://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html?highlight=atomicAdd#atomicadd
示例核函数代码
// 1. 直接使用原子操作进行归约
__global__ void reduction_atmoic(const float *gdata, float *out, int inputDataSize)
{
// 获取当前线程 id
size_t index = threadIdx.x + blockDim.x * blockIdx.x;
if (index < inputDataSize)
{
atomicAdd(out, gdata[index]);
}
}补充
任何 原子操作 都可以 借助 atomicCAS 来实现。例如"atomicAdd() for double-precision floating-point numbers is not available on devices with compute capability lower than 6.0 " ,可以借助单精度或这双精度浮点型的加法原子操作借助 atomicCAS 来实现。
#if __CUDA_ARCH__ < 600
__device__ double atomicAdd(double* address, double val)
{
unsigned long long int* address_as_ull =
(unsigned long long int*)address;
unsigned long long int old = *address_as_ull, assumed;
do {
assumed = old;
old = atomicCAS(address_as_ull, assumed,
__double_as_longlong(val +
__longlong_as_double(assumed)));
// Note: uses integer comparison to avoid hang in case of NaN (since NaN != NaN)
} while (assumed != old);
return __longlong_as_double(old);
}
#endif2.借助 shared memory, 使用经典并行归约方法,最后依赖原子操作进行归约
// 与前一个方法的区别仅在于最后使用原子操作来进行归约, 直接将所有的和加到 out 指向的内存空间
__global__ void reduce_atomicEnding(const float *gdata, float *out, int inputDataSize)
{
// 申请 BLOCK_SIZE 个 float 大小的共享内存空间
__shared__ float sdata[BLOCK_SIZE];
// 获取当前全局线程 index
size_t index = threadIdx.x + blockDim.x * blockIdx.x;
// 获取当前 block 中的线程ID tid, 并初始化对应地址 shared memory 的初始值
size_t tid = threadIdx.x;
sdata[tid] = 0;
// 使用 grid stride load(这里因为启动的总的线程数量为 gridDim.x * blockDim.x, 所以以这个数为步长)
while (index < inputDataSize)
{
sdata[tid] += gdata[index];
index += blockDim.x * gridDim.x;
}
// 对 sdata 中的数据进行归约计算, for 循环下标以 blockDim.x 为起点
for (size_t limit = blockDim.x / 2; limit > 0; limit >>= 1)
{
// 先进行数据同步
__syncthreads();
// tid 小于 limit 的数据才进行进一步的计算
if (tid < limit)
{
sdata[tid] += sdata[tid + limit];
}
}
// 将合并的结果协会 out 数组当中, 仅当tid 为 0 的线程做这一步
if (tid == 0)
{
atomicAdd(out, sdata[0]);
}
}3. 借助 warp sharp 机制, 进行归约
关键 API
warpSize
// This variable is of type int and contains the warp size in threads (see SIMT Architecture for the definition of a warp). Cuda 定义的内置变量,通常是 32, 由具体 GPU 架构有决定
T __shfl_down_sync(unsigned mask, T var, unsigned int delta, int width=warpSize);
// Copy from a lane with higher ID relative to caller.Calculates a source lane ID by adding delta to the caller's lane ID. The value of var held by the resulting lane ID is returned: this has the effect of shifting var down the warp by delta lanes.示例核函数代码
__global__ void reduction_warpSharp(const float *gdata, float *out, int inputDataSize)
{
// 申请 32 个 float 大小的共享内存空间(相当于在 block 下又细分了一个层级)
// 这里设置为 32 的原因是, block 中的线程数不会超过 1024,又 warpSize 的大小为 32, 所以一个 block 中的 warp 数量最多为 32
//
__shared__ float sdata[32];
// 获取当前全局线程 index
size_t index = threadIdx.x + blockDim.x * blockIdx.x;
// 获取当前 block 中的线程ID tid
size_t tid = threadIdx.x;
// warp sharp 方法要用到的一些参数的初始化, warp 的 val, mask, lane, warpID
float val = 0.0f;
unsigned mask = 0xFFFFFFFFU; // 指定 warp 中的哪些线程要参与后面的__shfl_down_sync, 这里暂时先一值用这个值就行
int lane = threadIdx.x % warpSize; // 这里这个值的取值范围 就是 0 到 31, 指代在同一个 warp 中的线程的唯一标识符
int warpID = threadIdx.x / warpSize; // block 中 warp 的唯一标识符
// 也是先使用 gride stride loop 加载数据,对 val 进行初始化(初步加载数据顺便先求一次和)
while (index < inputDataSize)
{
val += gdata[index];
index += blockDim.x * gridDim.x;
}
// 第一次先 使用__shfl_down_sync 函数来求一次和, 将同一个 warp 中的线程进行求和, 都累加到一个 warp 里 lane 为 1 的线程当中。
// for 循环 offset 以 warpSize / 2 为起点
for (size_t offset = warpSize / 2; offset > 0; offset >>= 1)
{
val += __shfl_down_sync(mask, val, offset);
}
// 当 lane == 0, 将 val 的值赋值到 sdata 当中, 完了之后 同步一次数据
if (lane == 0)
{
sdata[warpID] = val;
}
__syncthreads();
// 对于此时 warpID == 0 的线程, 再通过 _shfl_down_sync 进行一次归约
if (warpID == 0)
{
// 在条件当中,如果 tid < blockDim.x / warpSize, 则 将 val 赋值为 sdata[lane], 否则赋值为 0
if (tid < blockDim.x / warpSize)
{
val = sdata[lane];
}
else
{
val = 0;
}
// 然后使用 __shfl_down_sync 进行最后一次 归约
for (size_t offset = warpSize / 2; offset > 0; offset >>= 1)
{
val += __shfl_down_sync(mask, val, offset);
}
// 当 tid == 0, 使用 原子操作 将 块中计算的 和 val 累加到 out 指向的值当中
if (tid == 0)
{
atomicAdd(out, val);
}
}
}方法试验比较
实验中设置输入数组的大小为
const size_t N = 16ULL * 1024ULL * 1024ULL; // data size 16M
const int BLOCK_SIZE = 256;试验几次结果如下
reduction_atmoic took 0.063000 seconds.
atomic sum reduction correct!
reduce_atomicEnding took 0.002000 seconds.
reduction w/atomic sum correct!
reduction_warpSharp took 0.001000 seconds.
reduction warp shuffle sum correct!
reduction_atmoic took 0.061000 seconds.
atomic sum reduction correct!
reduce_atomicEnding took 0.002000 seconds.
reduction w/atomic sum correct!
reduction_warpSharp took 0.002000 seconds.
reduction warp shuffle sum correct!
reduction_atmoic took 0.063000 seconds.
atomic sum reduction correct!
reduce_atomicEnding took 0.003000 seconds.
reduction w/atomic sum correct!
reduction_warpSharp took 0.001000 seconds.
reduction warp shuffle sum correct!4.另外一种通过多次启动核函数的归约方式, 以求最大值为例
const size_t N = 8ULL * 1024ULL * 1024ULL; // data size
const int BLOCK_SIZE = 256; // CUDA maximum is 1024
__global__ void reduce(float *gdata, float *out, size_t n)
{
__shared__ float sdata[BLOCK_SIZE];
int tid = threadIdx.x;
sdata[tid] = 0.0f;
size_t idx = threadIdx.x + blockDim.x * blockIdx.x;
while (idx < n)
{ // grid stride loop to load data
sdata[tid] = max(sdata[tid], gdata[idx]);
idx += gridDim.x * blockDim.x;
}
for (size_t s = blockDim.x / 2; s > 0; s >>= 1)
{
__syncthreads();
if (tid < s)
{
sdata[tid] = max(sdata[tid], sdata[tid + s]);
}
}
if (tid == 0)
{
out[blockIdx.x] = sdata[0];
}
}基本和前面归约方法求和的类似, 除了使用 max 方法来进行归约。
然后在 CPU 侧的代码逻辑, 将分两次启动这个核函数, 来实现最终的求解最大值。
假设总的比较 的数量是 M * N, 第一次先分配 M 个Block 启动核函数, 每个 block 归出一个最大值, 然后再配置 N 个 Block 再启动一次核函数, 对剩下的 N 个数再归一次,取得最终的最大值。 类似
reduce<<<M, BLOCK_SIZE>>>(d_A, d_sums, M * N); // reduce stage 1
reduce<<<N, BLOCK_SIZE>>>(d_A, d_sums, N); // reduce stage 2因为当前版本的 Cuda 提供了只整型 取max 的原子操作,没有还没有直接的float 型的 max 浮点操作。否则就是 借助文章前面 提到的 atomicCAS 来实现 浮点数的 取最大值操作的原子操作。
小结
本节主要通过结合代码。介绍几种 基本的归约方法的实现。