机械超材料以其周期性的构建单元而闻名,是一类通过其微结构和组成材料决定其特殊性能与功能的架构材料。通过定制结构元素的几何形状、连接方式和空间分布,超材料的性能可以超越其组成材料,这一点已在晶格、拉胀超材料、多稳态机械超材料、折纸与剪纸超材料以及刺激响应超材料中得到证明。超材料设计使得在机器人分布式主体中定制结构异质性成为可能。超材料的结构多功能性使得机器人系统的设计不再局限于单一预定义功能,允许从共同的超材料架构中衍生出多样化的应用。例如,一种模块化手性折纸超材料已被证明可应用于机器人变形器、热调节、机械存储器、能量吸收和信息加密。
材料研究的一个新兴方向聚焦于主动和自适应行为,即材料被设计成能动态响应其环境,并可能有助于实现系统级功能,如传感或控制。这一视角将材料视为不仅仅是被动组件,而是更大系统内嵌入式智能的参与者。为此,我们将超材料机器人学定义为:利用超材料架构,将传感、驱动、控制或计算等一个或多个核心功能物理嵌入机器人体内的机器人系统,旨在提升其性能、适应性或集成度。
本综述将超材料机器人学定义为一个新兴前沿领域,其核心在于利用具有定制微结构的机械超材料,将传感、驱动、控制乃至计算等核心功能物理嵌入到机器人的本体结构中。这标志着一种范式转变,即机器人的"身体"不再是被动的结构部件,而是成为智能行为的积极参与者,为实现真正的具身智能奠定了基础。
该领域的发展从早期利用超材料获得优异机械性能(如轻质、大变形),演进到利用响应式材料实现环境感知与自适应运动。如今,结合人工智能进行设计与控制,其终极愿景是创造出能够像生命体一样,在复杂未知环境中自主适应、学习和演化的智能机器系统,从而模糊了材料、结构与智能之间的界限。
解决的问题:传统机器人的局限性:依赖分立式传感器与驱动器,导致系统笨重、集成困难、控制复杂。软机器人缺乏分布式感知与自适应能力,在动态、非结构化环境中,中央控制与计算能力不足;机器人的"身体"与"大脑"分离,限制了智能的嵌入与实时响应能力。
提出的方法:1、超材料设计三原则:力学启发架构:如晶格、拉胀材料、结构失稳,通过微结构设计实现轻量化、可调刚度、非线性响应。形状可重构结构:如折纸、剪纸、接触耦合,实现从2D到3D的形态变换与模块化重组。材料驱动功能:利用响应性材料(如热响应、光响应、磁响应)与多材料系统,实现感知-驱动一体化。
2、结合人工智能:使用生成式AI进行逆向设计与结构优化。强化学习用于自主控制与动态环境适应。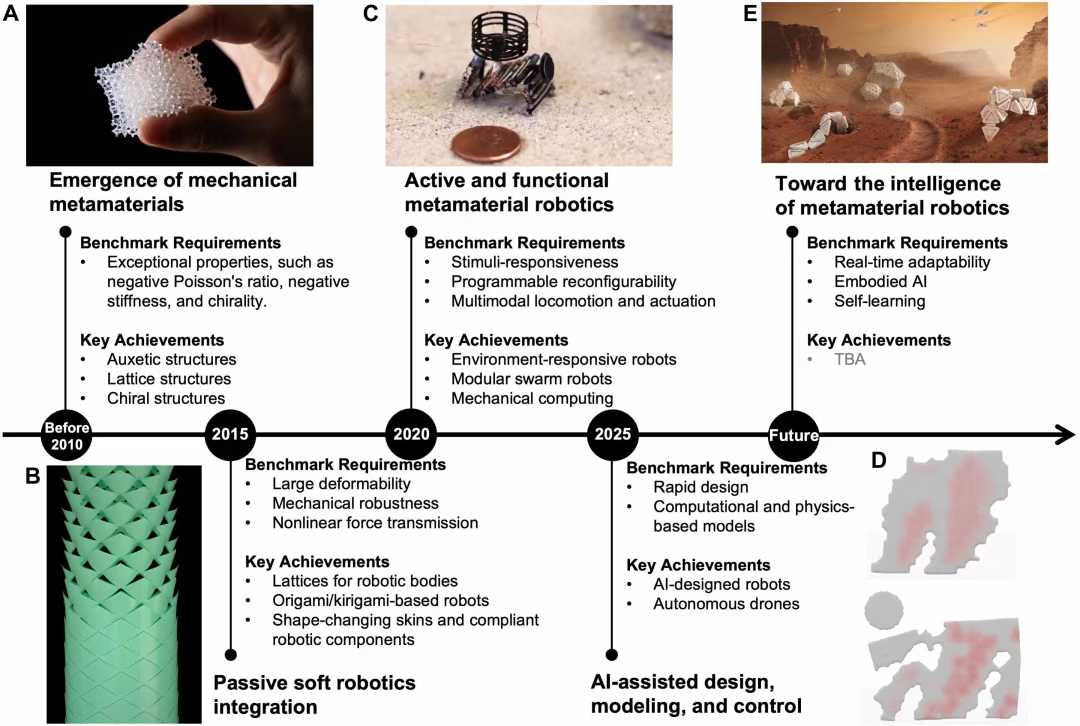
实现的效果:轻量化高强度结构:如碳纤维晶格自重构机器人。简化驱动与控制:如单驱动器+拉胀结构实现仿尺蠖运动。内置感知与机械计算:如压电超材料实现自感知与反馈控制。多模态运动与形态变换:如折纸机器人可飞行、滚动、抓取;磁耦合模块实现固态-液态切换。分布式智能与群体协作:如模块化机器人群体自组织构建复杂结构。
创新点:"身体即智能"理念:将传感、驱动、控制功能嵌入材料微结构中,实现具身智能。跨尺度设计框架:从微观单元到宏观系统,统一材料-结构-功能设计。机械神经网络与逻辑门:通过可调刚度结构实现学习与信息存储。多刺激响应与解耦控制:如一个机器人响应光、热、磁、pH等多种刺激。AI+物理仿真融合:加速超材料机器人设计与控制的迭代优化。
研究成果以题为:《Metamaterial robotics》发表于期刊《Science Robotics》。单位为:洛桑联邦理工学院、东京大学等,第一作者为:Xiaoyang Zheng.图1:用于机器人技术的超材料发展时间线(A) 拉胀超材料。(B) 能够利用剪纸皮肤爬行的软执行器。© 具有本体感觉的架构机器人超材料 (20)。(D) 由AI设计的用于移动和物体操纵的机器人。(E) 为太空任务而变换成各种形态的模块化、可重构机器人集群示意图 。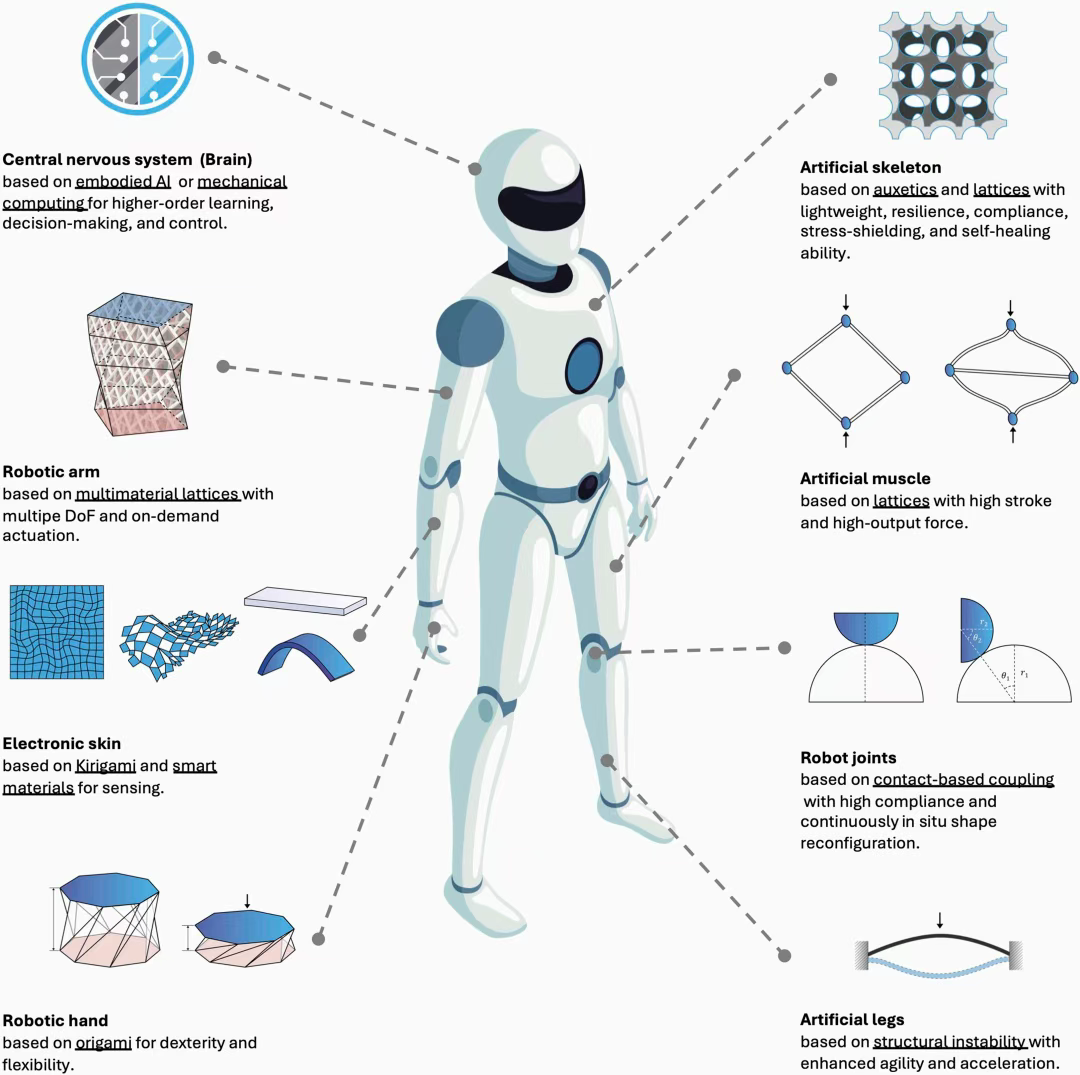
图2:人形超材料机器人的概念该机器人利用超材料设计作为核心机器人组件,其中枢神经系统负责高级功能,如学习、决策和控制。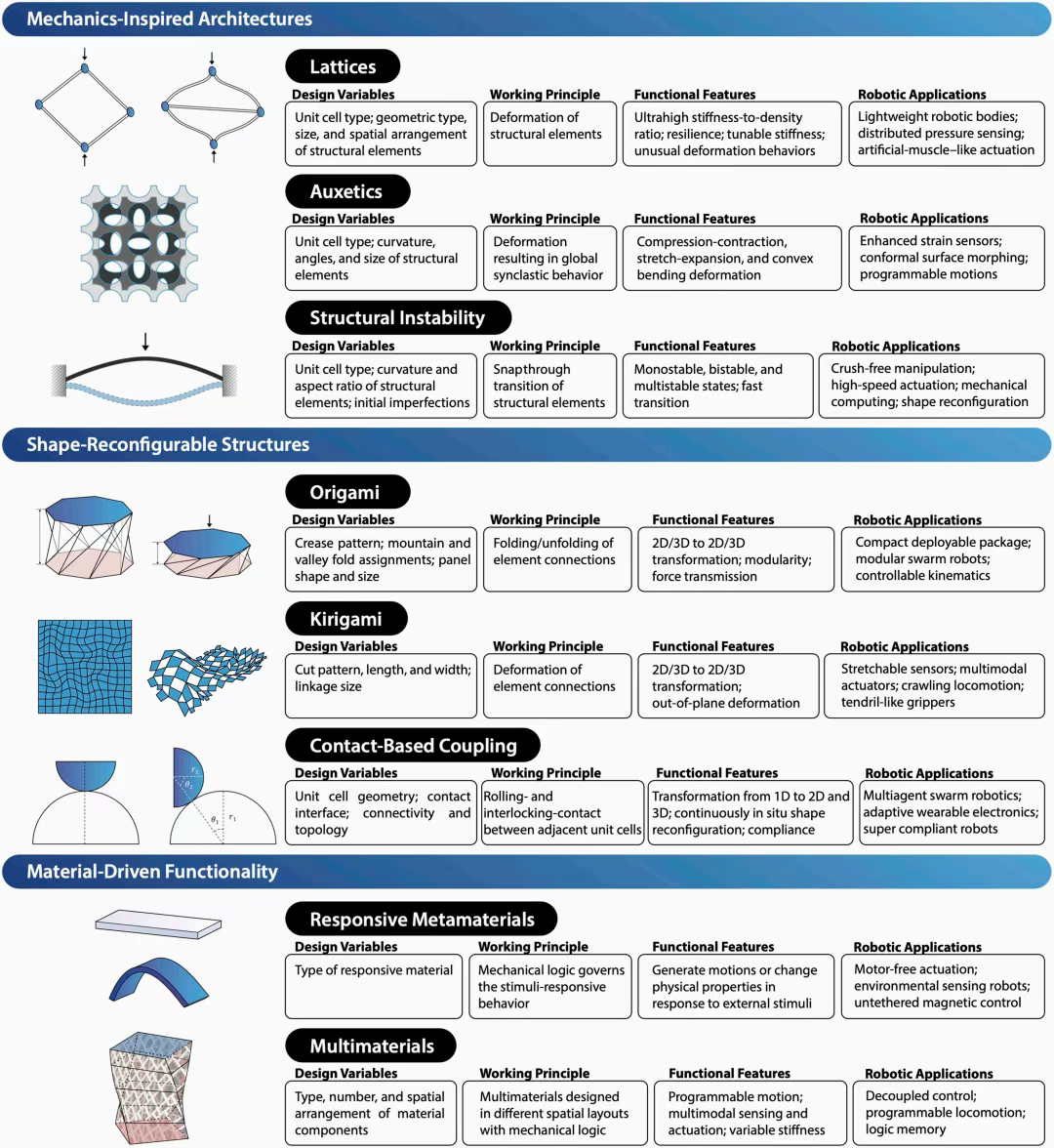
图3:用于机器人技术的超材料设计原理图示了三个主要类别:力学启发架构(晶格、拉胀结构和结构失稳)、形状可重构结构(折纸、剪纸和接触式耦合)以及材料驱动功能(响应式超材料和多材料)。重点展示了每种设计原理的设计变量、工作原理、功能特性和机器人应用。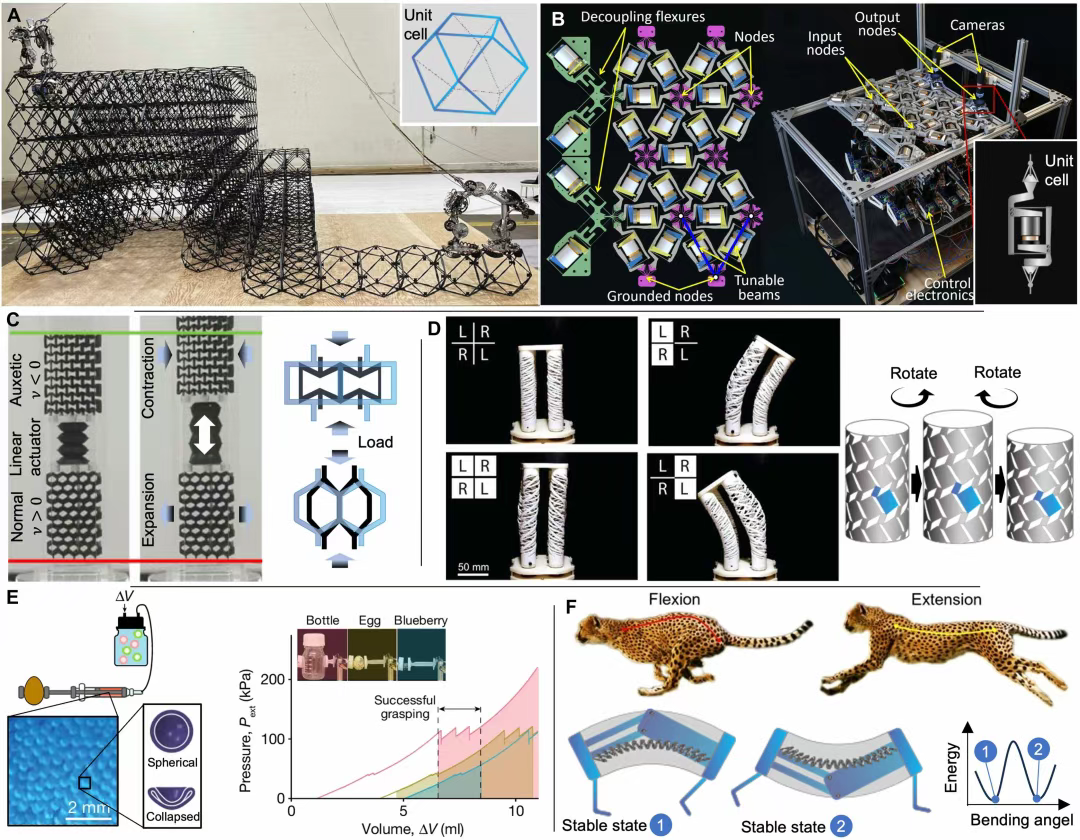
图4:基于力学启发架构的超材料机器人(A) 由超轻、高强度晶格超材料(插图)构成的可自我重构机器人结构系统的本体,由移动机器人组装和重构。(B) 能够通过调整梁刚度学习多种力学行为的基于晶格的机械神经网络。© 拉胀超材料简化了机器人控制并减少了软体机器人对执行器的需求。由拉胀离合器和一个常规离合器构成的软超材料机器人,使用单个执行器实现了尺蠖状运动。该执行器触发了两个被动离合器的内在同步:拉胀离合器在受压时横向收缩,而常规离合器则膨胀 。(D) 具有扭转变形特性的拉胀手性管增强了四自由度执行器。通过控制每个管的扭转,系统实现可编程运动。(E) 壳结构屈曲创建了一个由微米级胶囊构成的可编程金属流体。由壳屈曲产生的非线性行为使自适应双爪夹持器能够抓取尺寸和抗压强度差异巨大的物体。(F) 突弹跳变双稳态在 locomotive 软体机器人中放大了驱动速度和力,使其能够在数十毫秒内在两个稳定状态之间快速存储和释放能量。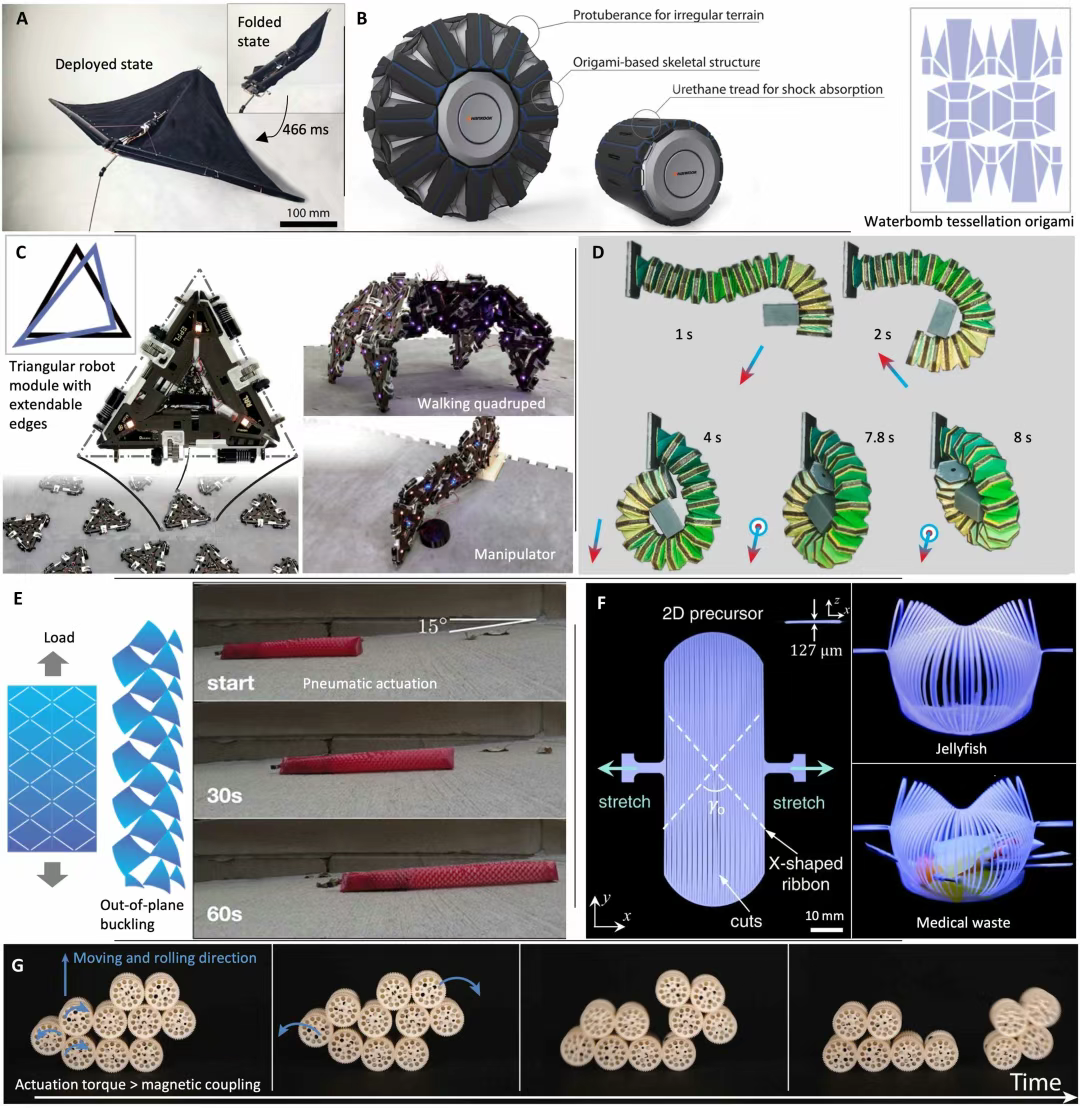
图5:基于形状可重构结构的超材料机器人技术(A) 柔性折纸框架形成可展开的滑翔机,通过释放储存的能量进行扩展。(B) 水弹球镶嵌折纸形成可变形轮,能够在两种配置之间切换。© 由三角形形状变化模块构成的模块化折纸机器人,可重构为多种三维形态。(D) 克雷斯林折纸模块构成章鱼状机器人手臂,具有全向弯曲和物体抓取功能。(E) 剪纸皮肤通过屈曲诱导的弹出纹理增强软体爬行器的爬行能力。(F) 基于剪纸的夹持器实现角度编程、卷须状抓取轨迹,用于处理各种物体。(G) 磁力滚动接触耦合使自组织机器人聚集体能够自主分裂和成形。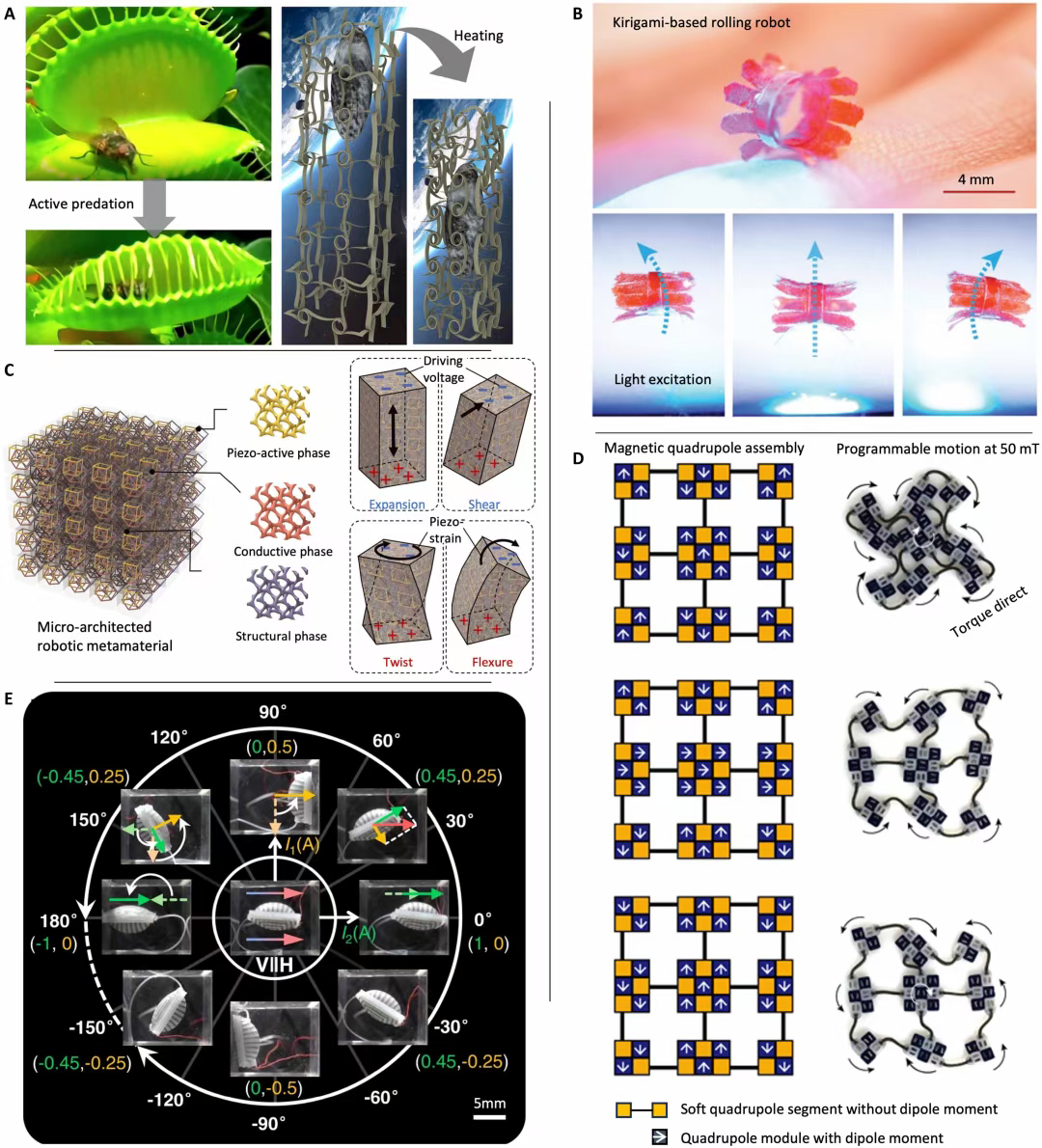
图6:基于响应式超材料的超材料机器人技术(A) 由恒温金属带构成的温度响应超材料,在极端温度环境下表现出主动捕食行为。(B) 光响应剪纸构成毫米级滚动机器人,其运动由光激发方向控制。© 具有各种应变模式和压电应变矩阵的压电超材料。(D) 磁响应晶格形成由被动和主动(具有偶极矩)四极子构成的可编程执行器,其可编程运动由磁化方向控制。(E) 具有自导向控制和高维操作能力的电磁软执行器模块,能够形成具有多模态运动能力的模块化机器人。
图7:基于多材料超材料的超材料机器人技术(A) 可与超材料设计集成的各种多材料布局。(B) 具有多种刺激响应性的多材料,创建了一个由多种解耦刺激驱动的模块化机器人。© 由磁响应肌腱和被动支柱构成的、以张拉整体结构架构的双材料,实现了磁控可编程驱动。(D) 将具有不同刚度的多材料组装成模块化超材料,允许基于折纸单元的折叠和展开序列进行可编程信息存储和/或加密。(E) 采用相变拉胀内骨骼的多层多材料超材料,用于构建自主变形的无人机。(F) 由被动超材料框架和局部嵌入的被动与主动单元构成的单元级多材料系统,实现了气动驱动的可重构机器人功能。
文章链接:https://www.science.org/doi/10.1126/scirobotics.adx1519