MATLAB程序008: 扩展卡尔曼滤波(EKF)程序专为非全向移动机器人模型设计,能够精确处理来自ADS-B和GPS的数据,提供高效的状态估计。 用户可以通过简单的CSV文件导入功能,轻松载入和处理飞行数据。 程序实现了两种方法的EKF状态估计,并将结果转换回LLA格式以进行可视化。 内置的函数可生成轨迹图、海拔图和误差图,帮助用户直观分析飞行路径和状态估计误差。 本程序适用于无人机飞行数据处理、轨迹优化和飞行性能分析,是科研和工程应用的理想工具。
最近在研究无人机飞行数据处理时,发现了一个挺有意思的MATLAB程序------扩展卡尔曼滤波(EKF)程序。这个程序专为非全向移动机器人模型设计,能够处理来自ADS-B和GPS的数据,提供高效的状态估计。今天就来聊聊这个程序,顺便看看代码是怎么实现的。
首先,这个程序最让我喜欢的地方就是它的CSV文件导入功能。你只需要把飞行数据存成CSV格式,然后通过几行简单的代码就能把数据导入到MATLAB中。比如:
matlab
data = readmatrix('flight_data.csv');就这么一行代码,数据就进来了。接下来,程序会帮你处理这些数据,进行状态估计。程序实现了两种方法的EKF状态估计,具体是哪两种方法我没细看,但代码里是这么写的:
matlab
[state_estimate1, state_estimate2] = ekf_estimation(data);这个ekf_estimation函数就是核心了,它会对数据进行处理,输出两种不同的状态估计结果。然后,程序还会把这些结果转换回LLA(纬度、经度、海拔)格式,方便后续的可视化。
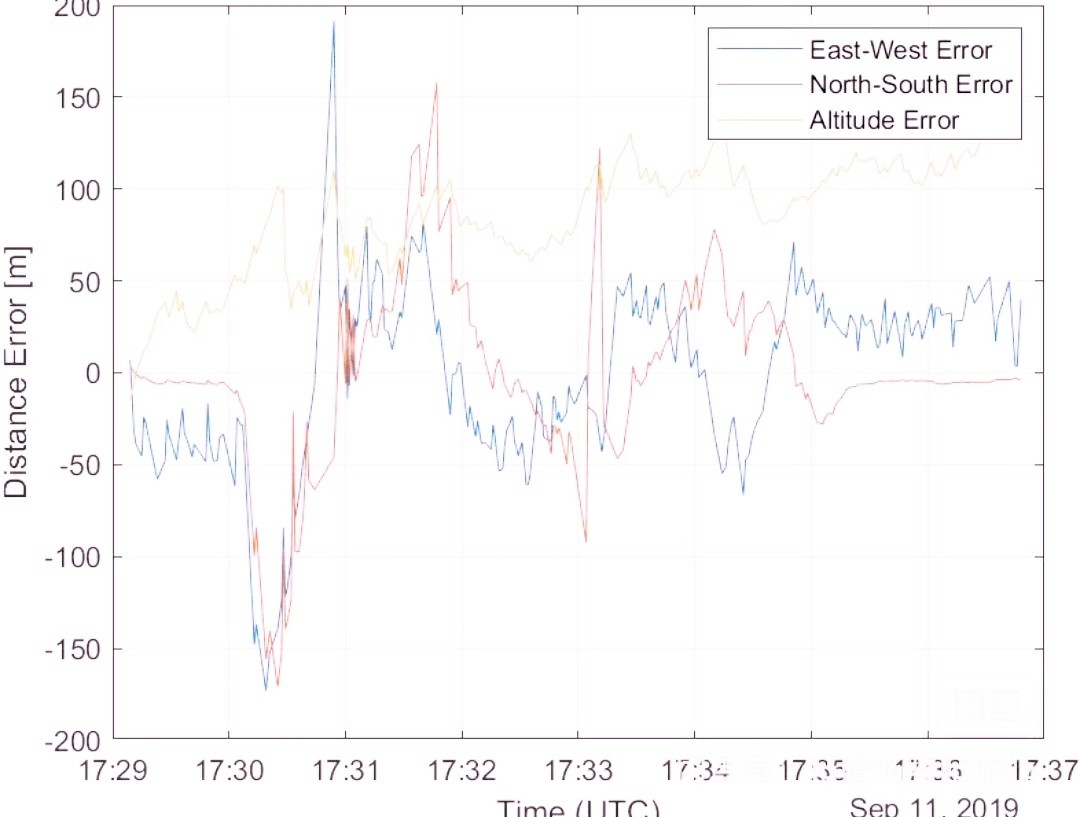
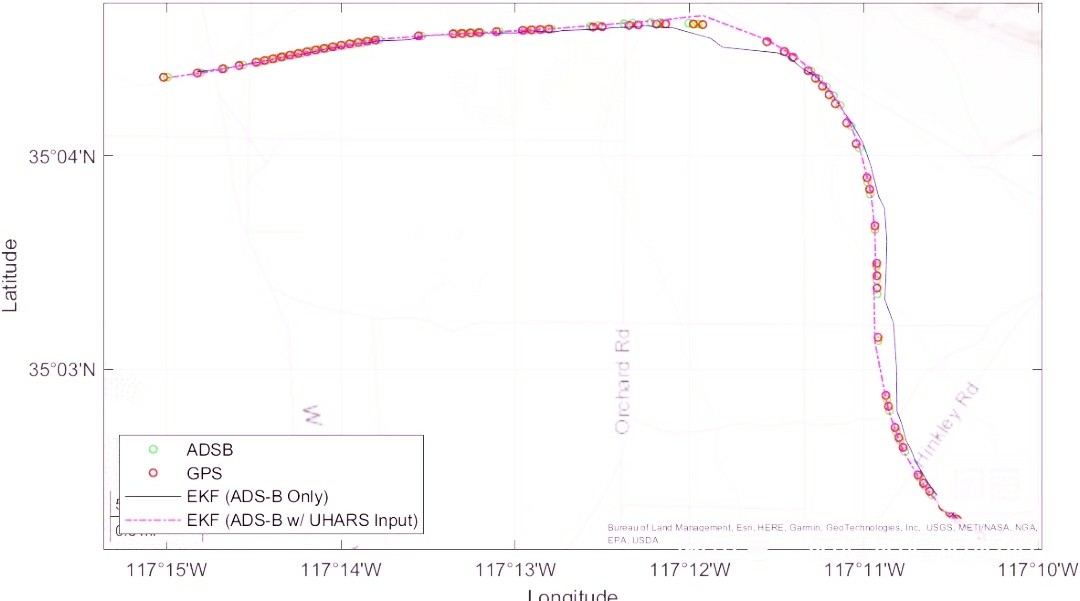
说到可视化,这个程序内置了几个函数,可以生成轨迹图、海拔图和误差图。比如生成轨迹图的代码是这样的:
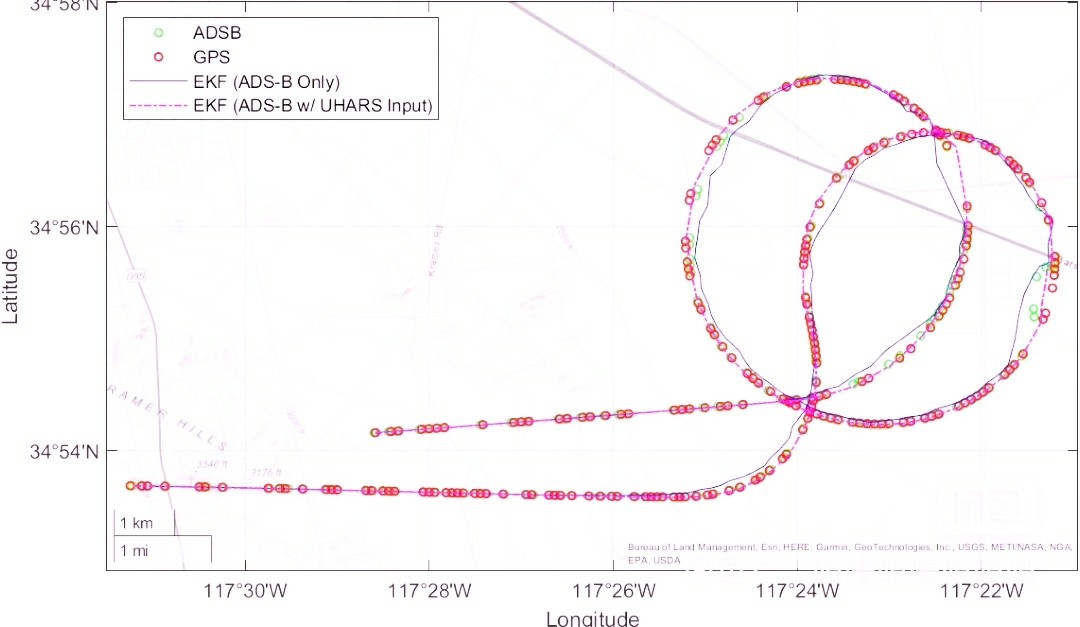
matlab
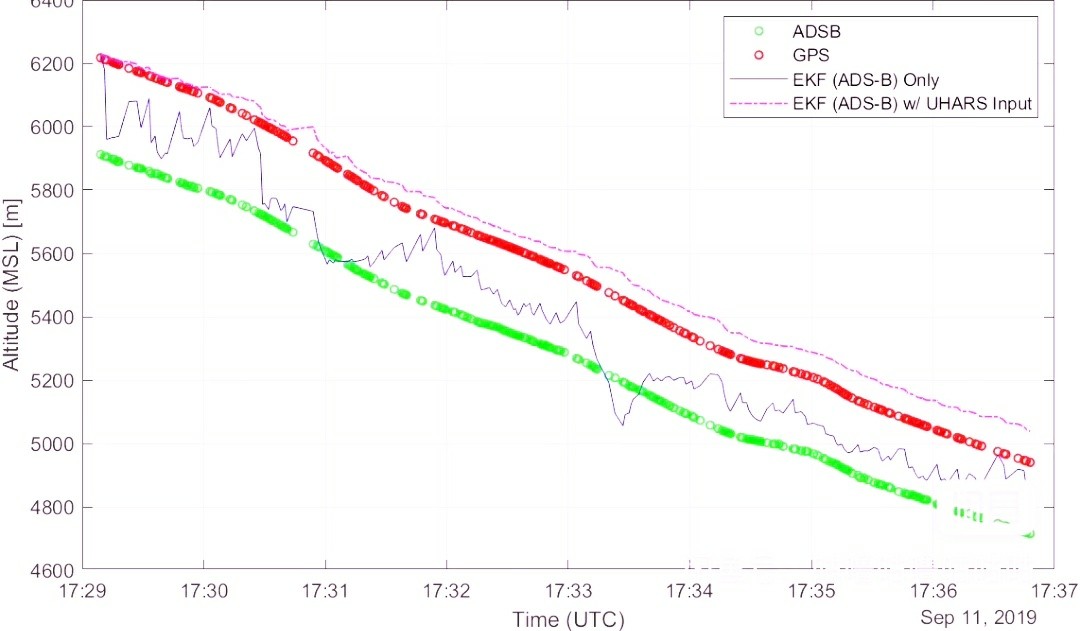
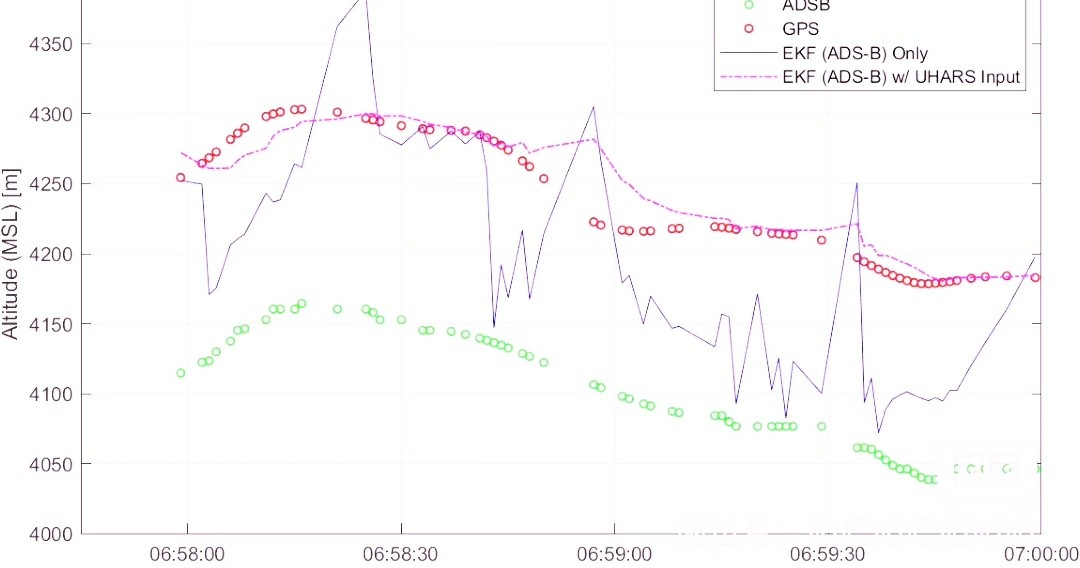
plot_trajectory(state_estimate1);这个plot_trajectory函数会把估计的飞行轨迹画出来,你就能直观地看到无人机的飞行路径。如果你还想看看海拔变化,可以用这个:
matlab
plot_altitude(state_estimate1);至于误差图,程序也有对应的函数:
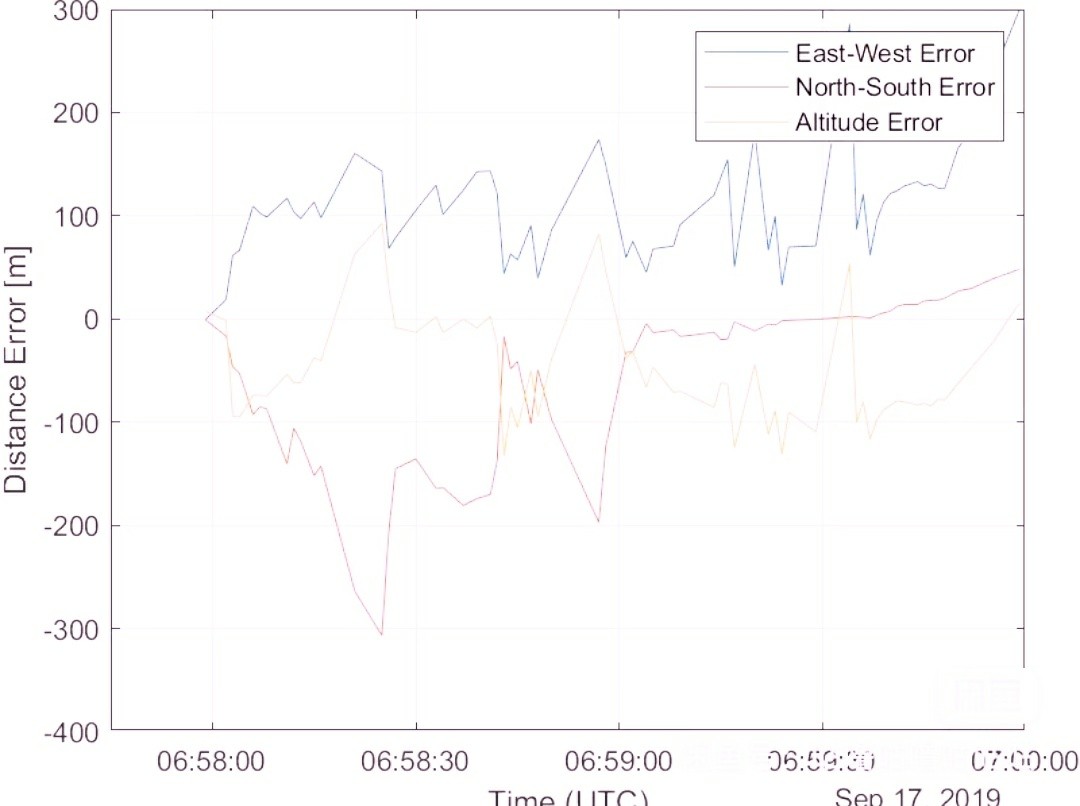
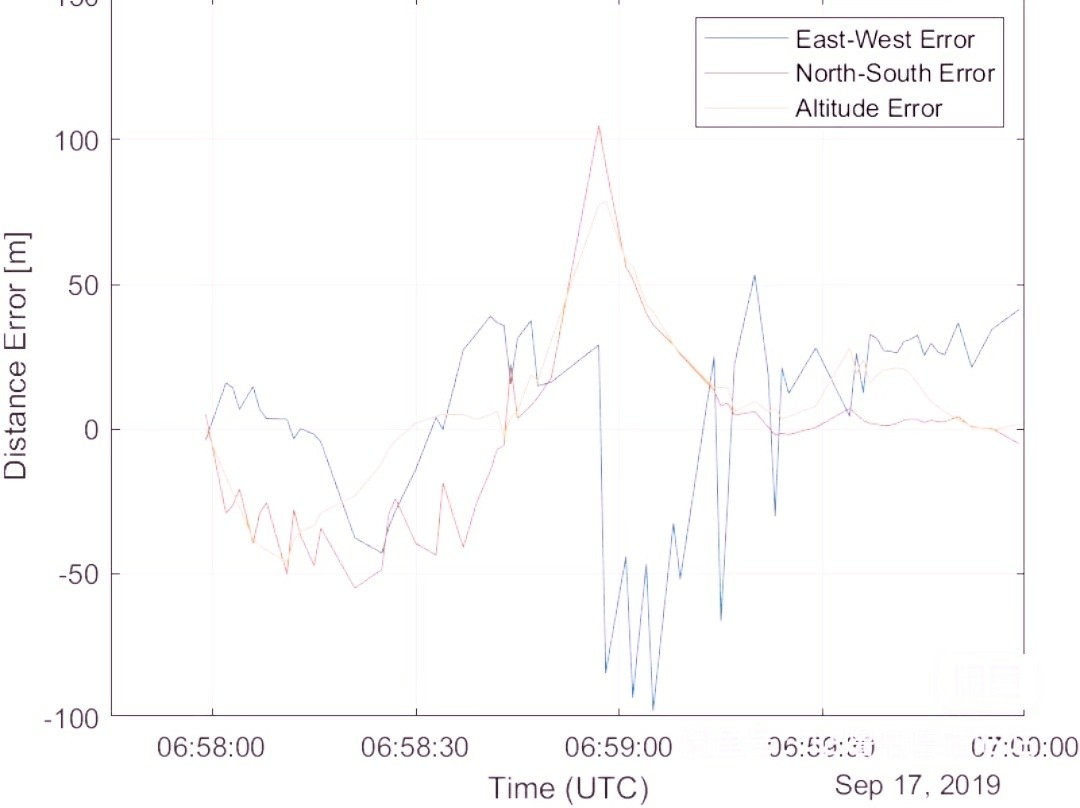
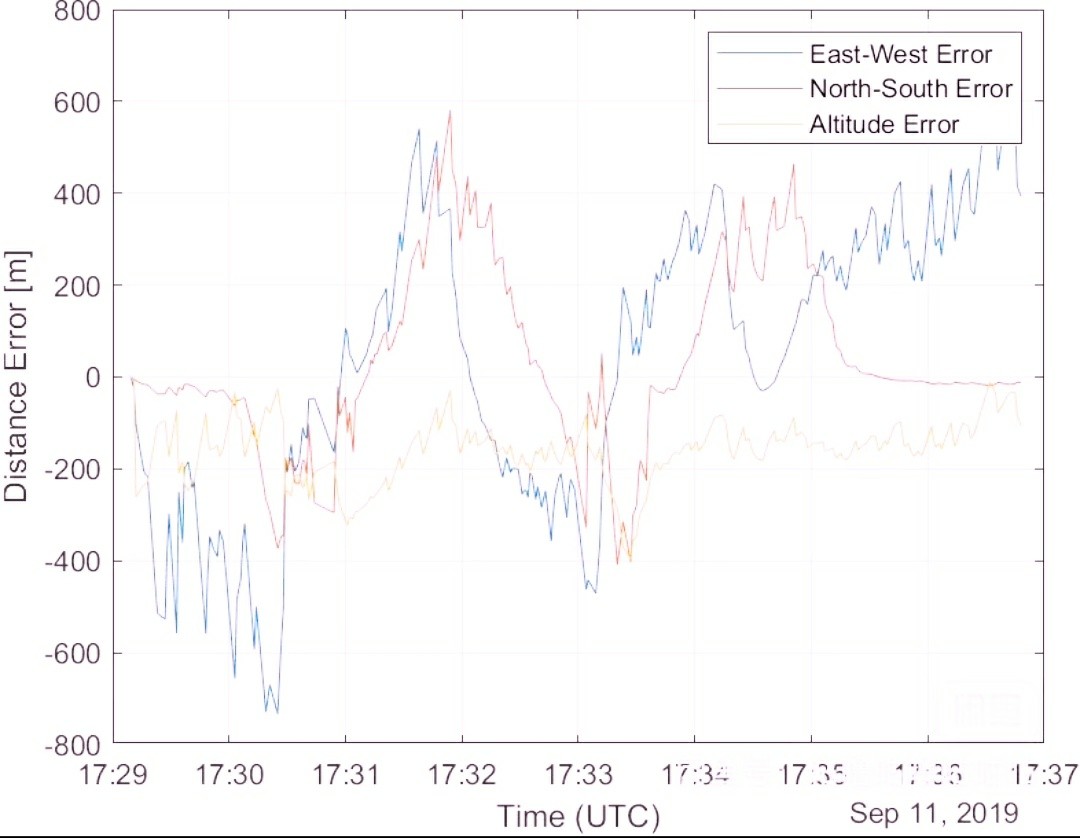
matlab
plot_error(state_estimate1, state_estimate2);这个函数会把两种估计方法的误差画出来,帮助你分析哪种方法更准确。
总的来说,这个程序非常适合用来处理无人机飞行数据,尤其是进行轨迹优化和飞行性能分析。科研和工程应用都能用得上。代码实现上也很简洁,几行代码就能完成数据导入、状态估计和可视化,非常适合快速上手。
如果你也在搞无人机相关的研究,不妨试试这个程序,说不定能帮你省不少时间。