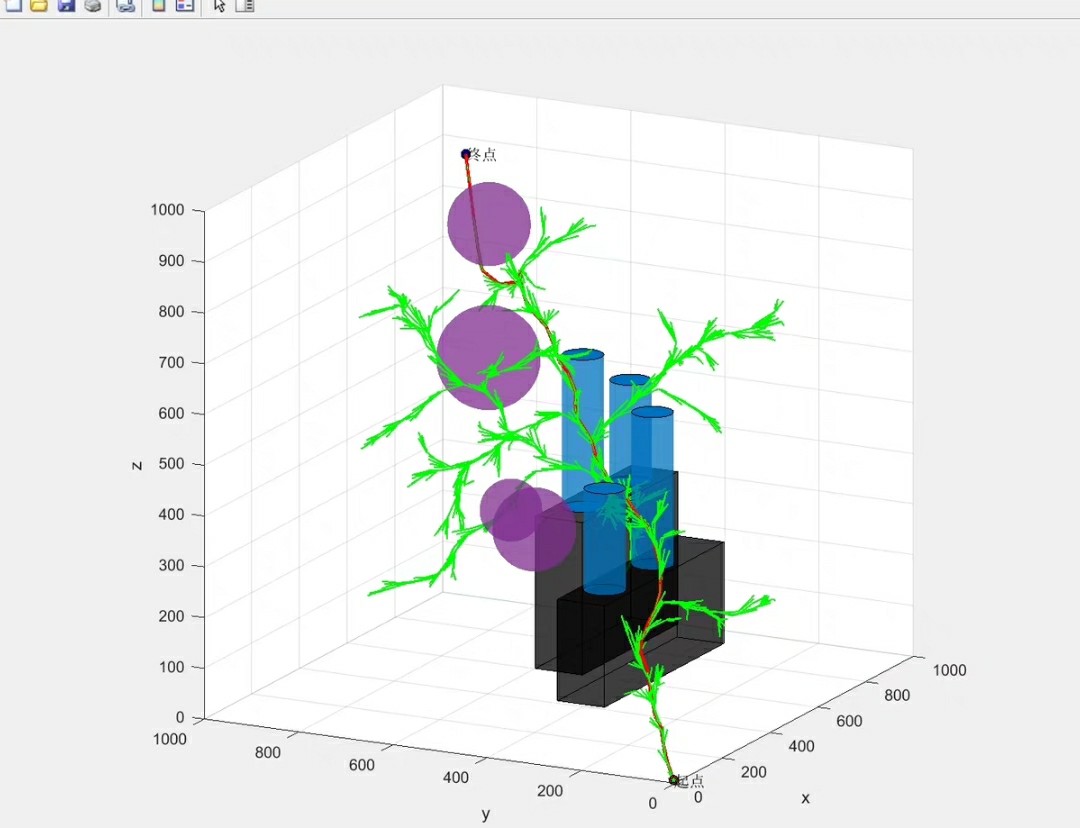
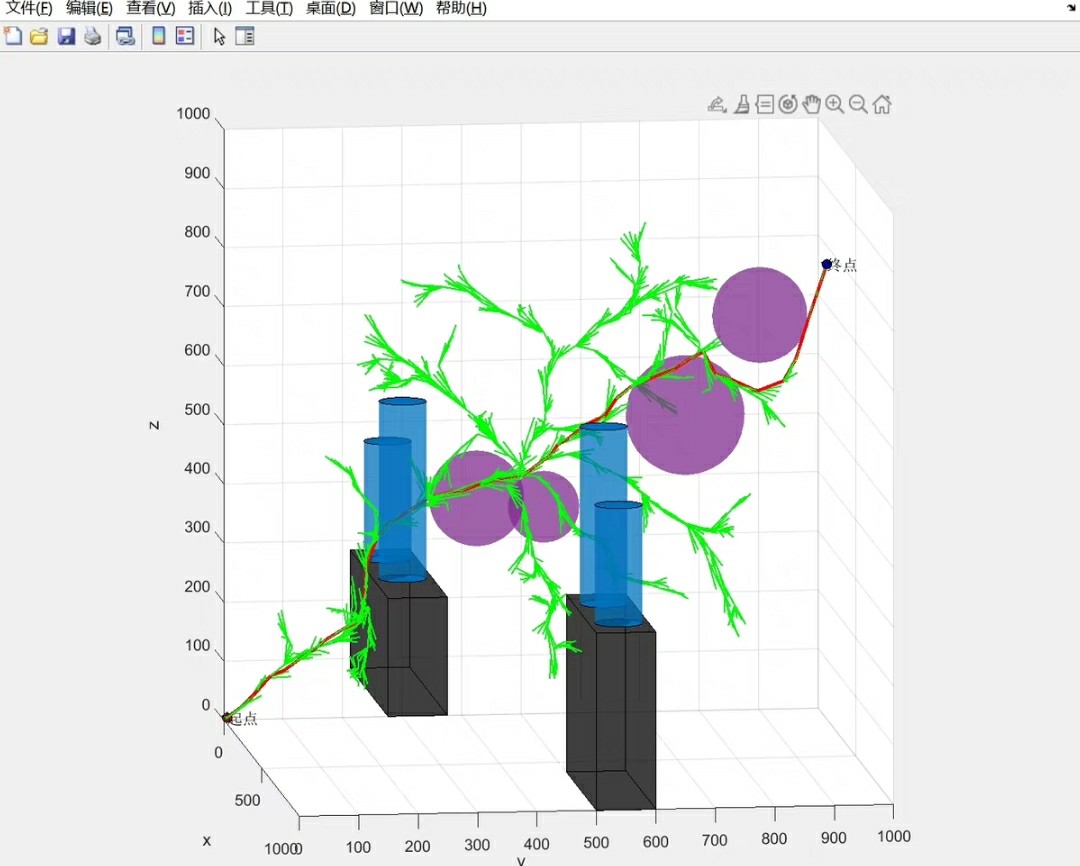
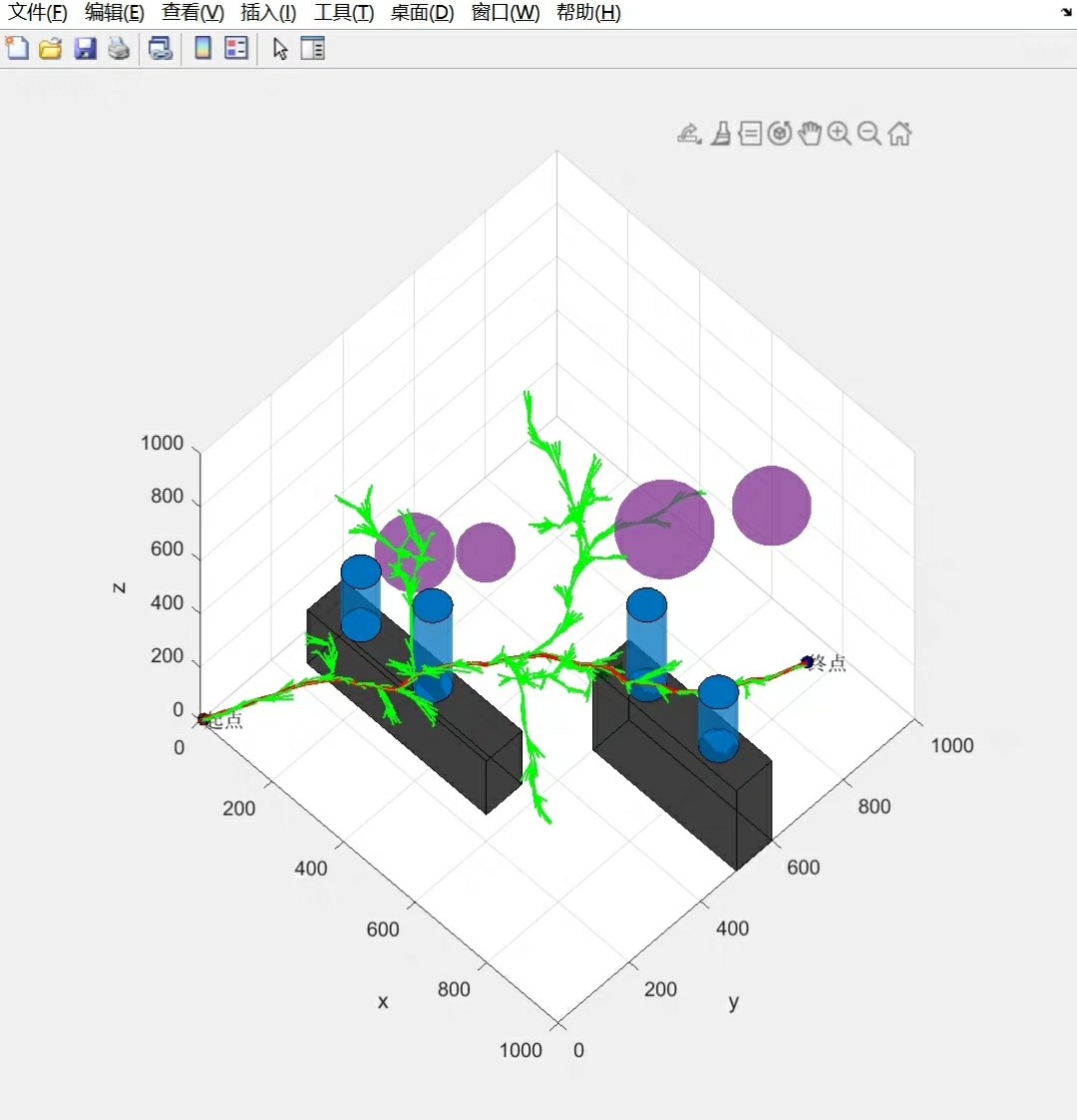
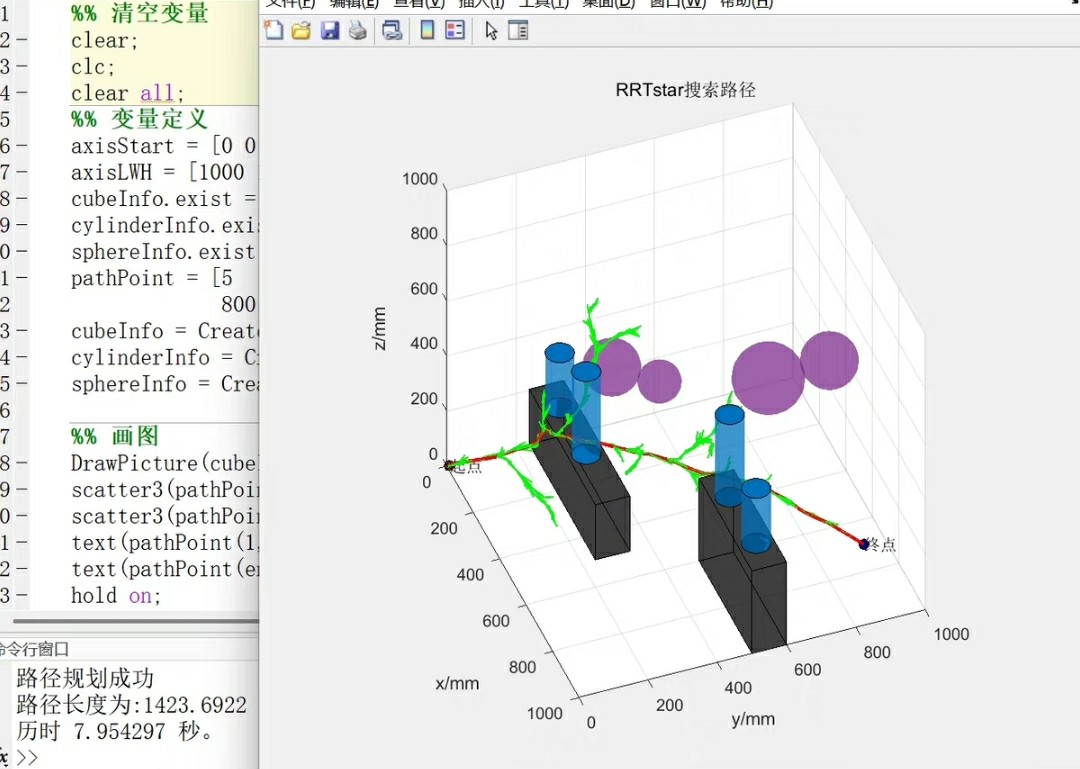
RRT星三维路径搜索 matlab 代码 代码可自定义建立三维仿真环境,障碍物形状,大小和位置可自定义,搜索起点和终点也可自定义设置,运行效果如图。 可输出搜索路径的长度和搜索时间。 代码有注释,参考学习方便。
最近搞了个超有意思的RRT星三维路径搜索Matlab代码,必须来和大家分享一下😎!
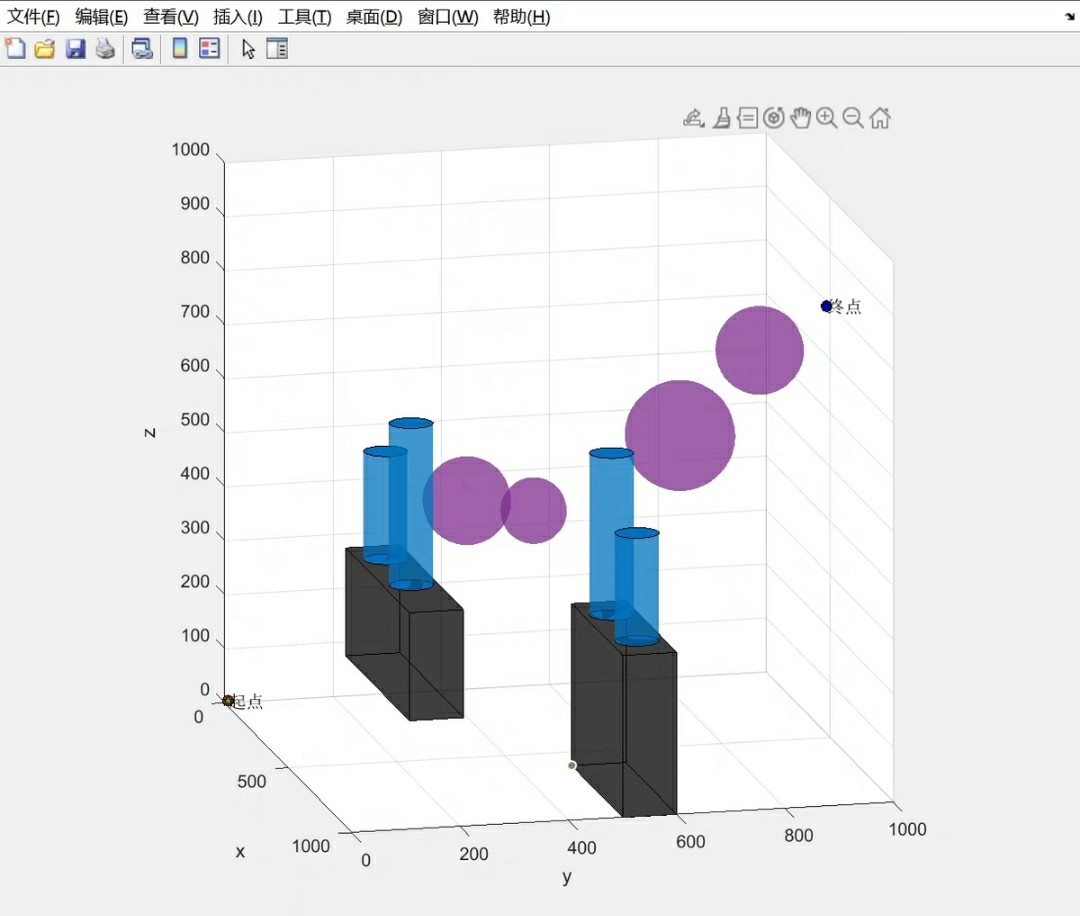
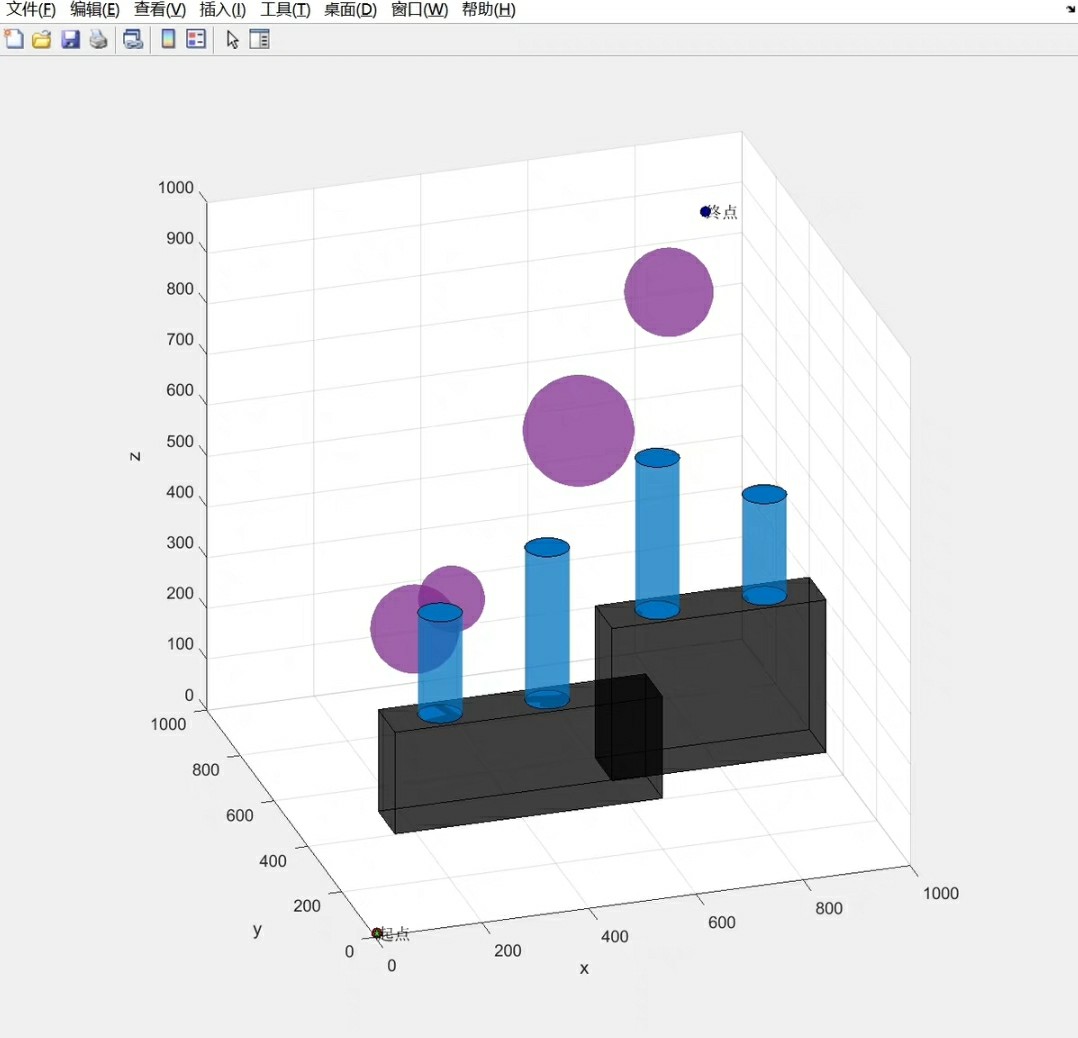
这个代码超厉害的,可以自定义建立三维仿真环境哦。你能随心所欲地设置障碍物的形状、大小还有位置,起点和终点也能根据自己的需求来定,简直不要太方便👍!
代码部分🧐
matlab
% 初始化三维空间
xlim = [-10, 10];
ylim = [-10, 10];
zlim = [-10, 10];
obstacle_radius = 1;
% 随机生成一些障碍物
num_obstacles = 5;
obstacles = zeros(3, num_obstacles);
for i = 1:num_obstacles
obstacles(:, i) = [randi([xlim(1)+obstacle_radius, xlim(2)-obstacle_radius]),...
randi([ylim(1)+obstacle_radius, ylim(2)-obstacle_radius]),...
randi([zlim(1)+obstacle_radius, zlim(2)-obstacle_radius])];
end
% 定义起点和终点
start_point = [xlim(1), ylim(1), zlim(1)];
end_point = [xlim(2), ylim(2), zlim(2)];
% 运行RRT星算法
tic;
[path, path_length] = rrt_star_3d(start_point, end_point, xlim, ylim, zlim, obstacles);
toc;
% 输出路径长度和搜索时间
fprintf('Path length: %.2f\n', path_length);
fprintf('Search time: %.2f seconds\n', toc);
% 绘制结果
figure;
hold on;
for i = 1:size(obstacles, 2)
viscircles(obstacles(:, i), obstacle_radius);
end
plot3(path(:, 1), path(:, 2), path(:, 3), 'r', 'LineWidth', 2);
plot3(start_point(1), start_point(2), start_point(3), 'go', 'MarkerSize', 10, 'LineWidth', 2);
plot3(end_point(1), end_point(2), end_point(3), 'ro', 'MarkerSize', 10, 'LineWidth', 2);
xlabel('X');
ylabel('Y');
zlabel('Z');
title('RRT* 3D Path Search');
grid on;
hold off;这里呢,先初始化了三维空间的范围,然后随机生成了一些障碍物,每个障碍物就是一个三维坐标点,半径是1。接着定义了起点和终点,之后就开始运行RRT星算法啦。运行完后,输出了路径长度和搜索时间,最后还绘制出了结果,包括障碍物、路径、起点和终点,是不是很直观😃?
代码分析🤓
这段代码里,初始化部分很重要哦。它确定了三维空间的边界,这样才能知道哪里是可以搜索的范围。随机生成障碍物的部分,就是按照设定好的半径,在空间里随机丢几个点当作障碍物。
定义起点和终点就不用多说啦,这是我们要找路径连接的两个关键位置。
运行RRT星算法那块,tic和toc配合得很好,tic开始计时,算法运行结束后toc就能算出运行时间,这样就能知道搜索路径花了多久啦。
绘制结果的时候,viscircles函数把障碍物画成了圆,plot3函数则把路径、起点和终点都画出来了,这样整个搜索过程就一目了然啦👏!
总之,这个RRT星三维路径搜索Matlab代码真的很实用,注释也写得很详细,特别适合用来学习和研究三维路径搜索算法😜。大家赶紧拿去试试吧!
#RRT星 #三维路径搜索 #Matlab代码 #仿真环境 #障碍物 #路径长度 #搜索时间