无人驾驶车辆模型预测控制 自动驾驶 汽车运动学模型验证 simulink和Carsim仿真结果对比 1.基于matlab2021a和Carsim2020 2.提供模型相关的说明文档

在自动驾驶领域,模型预测控制(MPC)是一项至关重要的技术,它基于车辆模型对未来的行驶状态进行预测,并据此做出最优的控制决策。今天,咱就来聊聊基于Matlab 2021a和Carsim 2020的无人驾驶车辆模型预测控制,顺便看看汽车运动学模型验证以及Simulink和Carsim仿真结果对比。
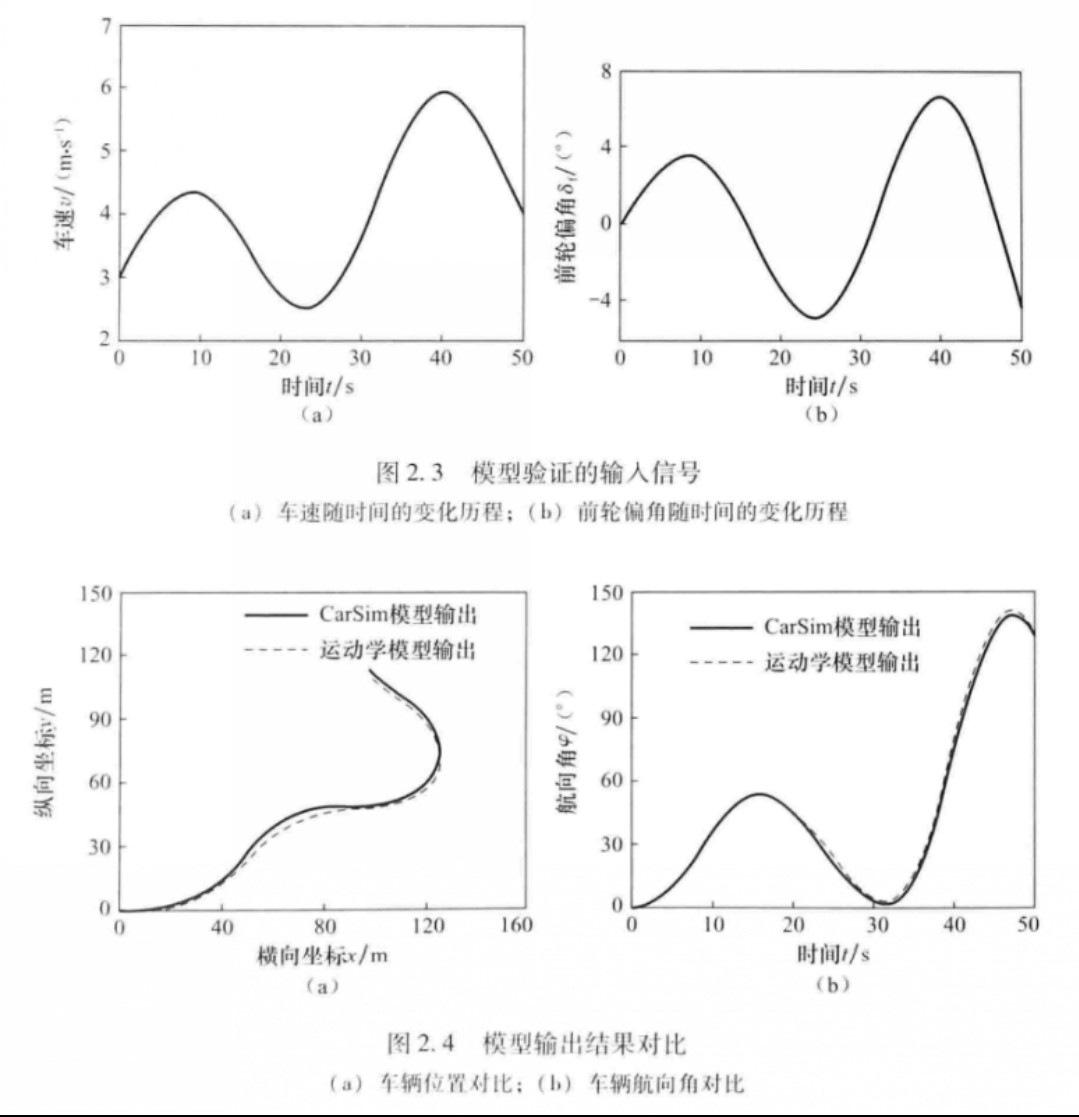
汽车运动学模型验证
首先,得搞清楚汽车运动学模型。简单来说,它描述了车辆如何根据输入的控制量(如方向盘转角、车速等)改变自身位置和姿态。下面这段简单的Matlab代码示例,可用于模拟一个简化的车辆运动学模型:
matlab
% 车辆参数
L = 2.8; % 轴距
dt = 0.1; % 时间步长
% 初始状态
x = 0;
y = 0;
theta = 0;
v = 5; % 初始车速
% 控制输入
delta = 0.1; % 方向盘转角
% 模拟循环
for i = 1:100
% 运动学模型公式
x = x + v * cos(theta) * dt;
y = y + v * sin(theta) * dt;
theta = theta + v / L * tan(delta) * dt;
% 显示当前状态
fprintf('Step %d: x = %.2f, y = %.2f, theta = %.2f\n', i, x, y, theta);
end代码分析
- 参数定义 :我们先定义了车辆的轴距
L和时间步长dt,这两个参数对模型的准确性很关键。轴距决定了车辆转向时的几何关系,而时间步长则影响了模拟的精细程度。 - 初始状态设置 :设置车辆的初始位置
(x, y)为原点,初始航向角theta为0,以及初始车速v。这些初始条件是模拟的起点。 - 控制输入 :设定了方向盘转角
delta,它是车辆转向的关键控制量。 - 模拟循环 :在循环中,依据运动学模型公式更新车辆的位置和航向角。
x和y的更新基于车速在当前航向角方向上的分量,而theta的更新则考虑了车速、轴距和方向盘转角的关系。每一步循环都打印出当前车辆的状态,方便查看模拟过程。
验证这个模型,我们需要将实际测量的数据或者更精确的参考模型与之对比。若模拟结果与预期相符,那就说明咱这个运动学模型是靠谱的。
Simulink和Carsim仿真结果对比
Simulink和Carsim都是自动驾驶领域常用的仿真工具。Simulink基于Matlab,提供了丰富的模块库用于搭建控制系统;而Carsim则专注于车辆动力学的精确建模。
在Matlab 2021a和Carsim 2020中的设置
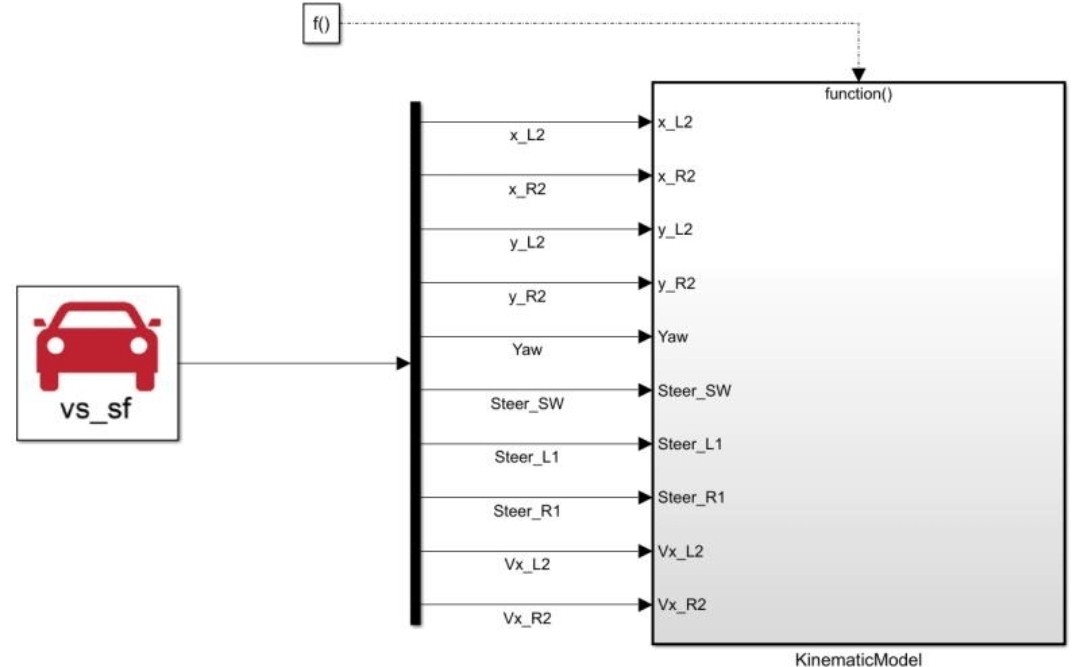
- Matlab与Carsim连接:在Matlab中,通过Carsim S函数可以实现与Carsim的连接。首先得在Carsim中设置好车辆模型参数,导出相应的接口文件。然后在Matlab中配置Carsim S函数,指定接口文件路径等参数。
- Simulink模型搭建:利用Simulink模块搭建MPC控制器。比如,使用"Pid Controller"模块调节车速,用"Gain"模块模拟方向盘转角的控制等。同时,将车辆运动学和动力学相关的输入输出连接到Carsim S函数对应的接口。
仿真结果对比
运行仿真后,就可以对比两者的结果了。例如,观察车辆在相同控制输入下的行驶轨迹、速度变化等。如果Simulink和Carsim的结果差异较大,那就得检查模型设置、参数传递等环节是否有误。可能是Carsim中车辆参数设置不准确,也可能是Simulink中控制算法的逻辑有问题。
模型相关的说明文档
为了让其他人能理解和复用咱的模型,写一份详细的说明文档必不可少。文档里得涵盖模型的基本原理,像刚才讲的运动学模型公式及其推导过程。还得说明Matlab和Carsim中的参数设置,每个参数代表什么含义,对模型有啥影响。对于Simulink模型,要给出模块连接图和每个模块的功能介绍。这样一来,不管是自己以后回顾,还是团队成员接手,都能快速上手。
总之,无人驾驶车辆模型预测控制是个复杂但超有趣的领域,通过Matlab、Simulink和Carsim的结合,能让我们更深入地理解和优化车辆的控制策略。希望这篇博文能给各位在自动驾驶探索路上的小伙伴一些启发。