机器人焊接仿真工具3.0
建模扫描操作
可添加相机拍照点位或 连续组合的点位组。添加一条后,点行末执行按钮可单条定位到相机拍照位置点。
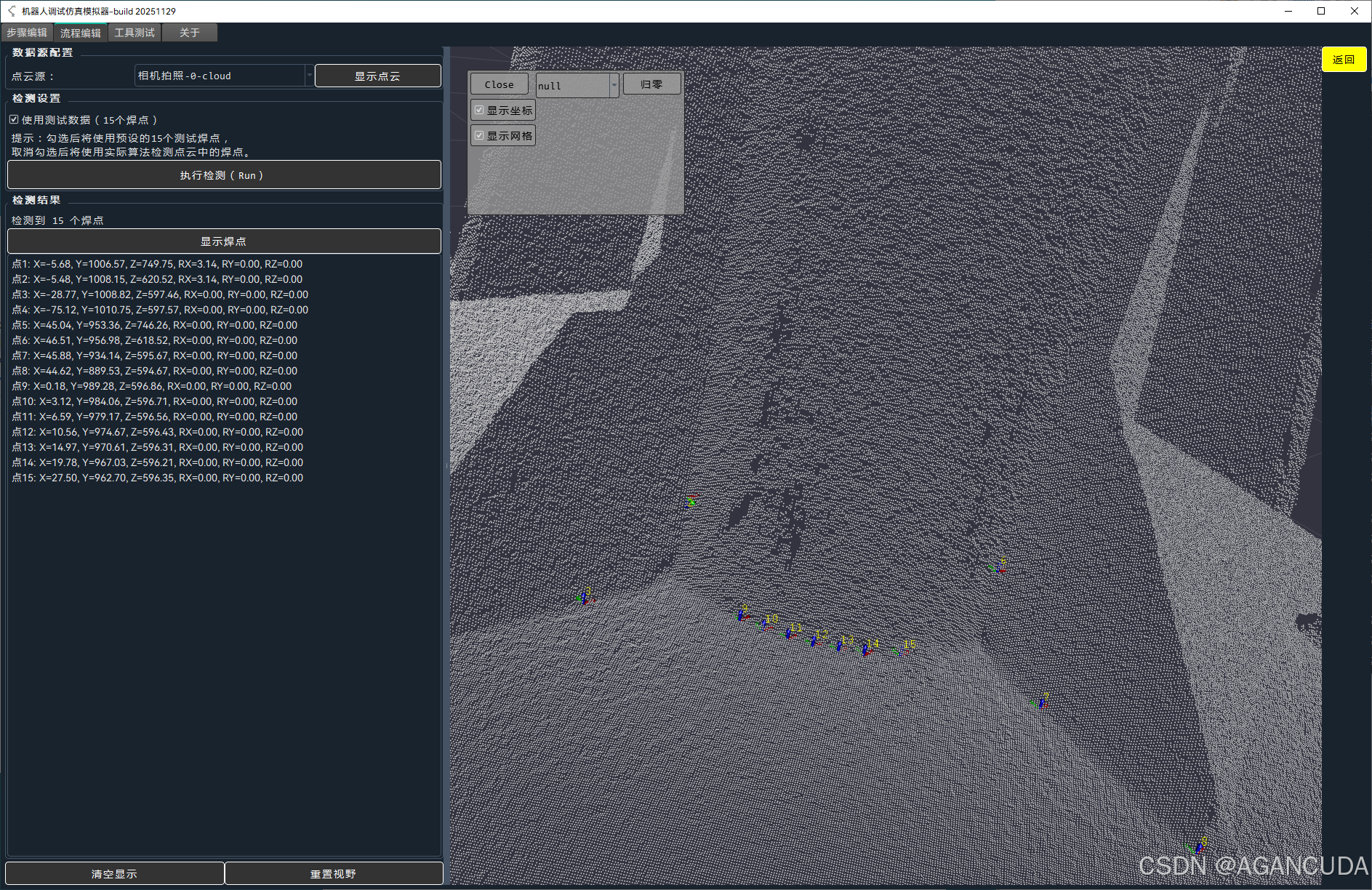
生成识别的焊点
一键生成焊点则会按照上面列表一一执行移动相机来计算生成识别焊点数据。生成后的识别焊点与上面建模动作具有关联性,当选择显示全部建模点将刷新显示所有生成的识别焊点。
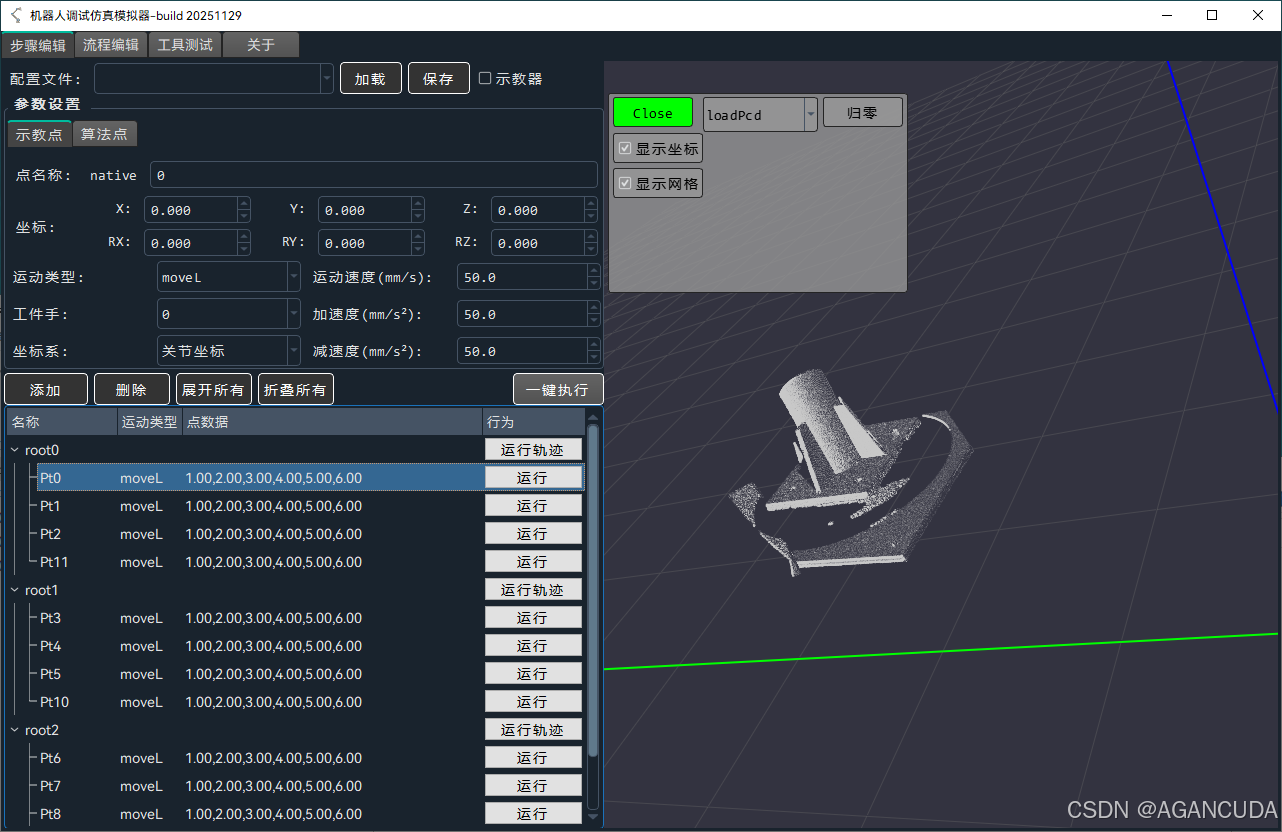
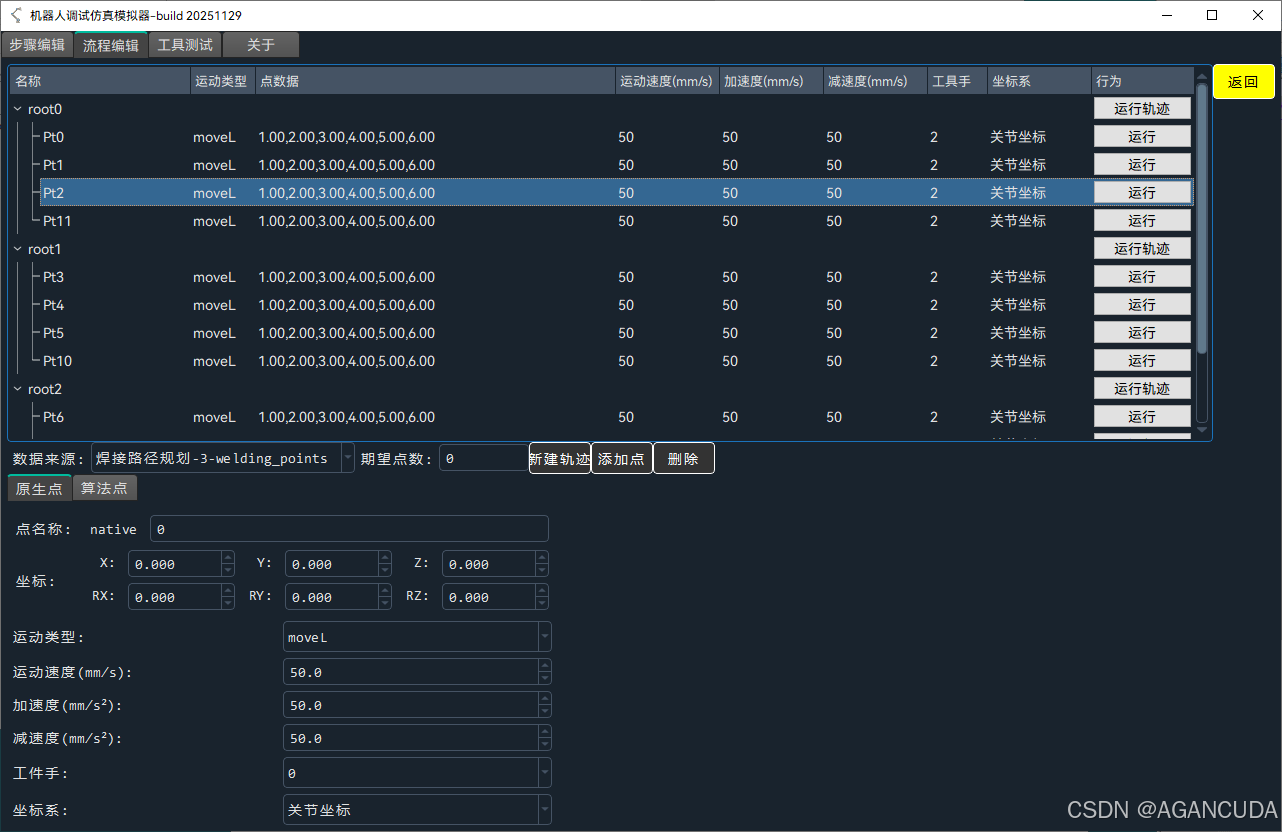
焊接操作
创建焊接步骤:在得到识别后的焊点后,根据焊点数据创建焊接步骤,上面动作行为下拉含有:过度点,起弧,收弧,moveL (其他待定)等操作关联项。 焊接步骤的一条组合至少包含一个点位(可添加识别焊点外的点位做补充) 。
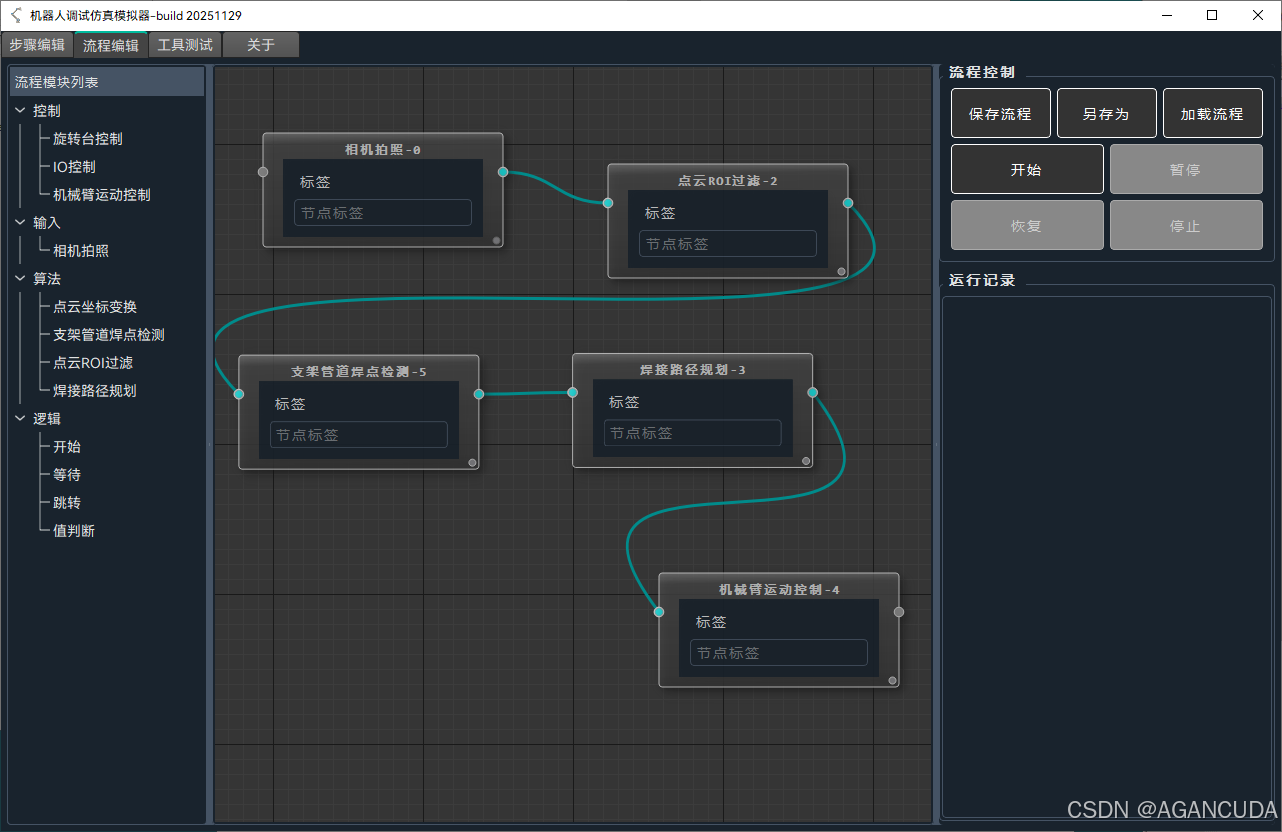
一键全部执行
将根据上表创建完成的焊接组合步骤一一执行。