深度学习图像低光照增强算法低照度增强3DLUT,DeepUPT,DeepLPF,RetinexNet,Zero-DCE,EnlightenGAN,RetinexFormer等 图像调色增强算法HDRNet,StarEnhancer,CSRNet等 水下增强算法UWGAN,UIEGAN等 pytorch架构复现,有代码和benchmark数据集
在图像处理领域,针对不同场景和需求,有着各种各样的深度学习算法。今天咱们就来唠唠图像低光照增强、图像调色增强、水下增强这些方向的算法,顺便聊聊怎么在PyTorch架构下复现,还带上benchmark数据集哦。
一、图像低光照增强算法
1. 3DLUT(三维查找表)
虽然它严格来说不完全是深度学习算法,但在低光照增强里也起着重要作用。3DLUT通过预先计算好的映射关系,快速调整图像的颜色和亮度。比如在一些简单的低光照场景,利用它可以快速提升图像整体的亮度。
2. DeepUPT、DeepLPF
这俩算法致力于从深度神经网络的角度对低光照图像进行增强。DeepUPT可能侧重于对图像的细节恢复,它通过构建多层的神经网络结构,从低光照图像中学习到光照信息和图像本身的特征信息,从而实现增强。以下是一个简单的类似神经网络结构示例代码(仅为示意,非完整可运行代码):
python
import torch
import torch.nn as nn
class SimpleEnhanceNet(nn.Module):
def __init__(self):
super(SimpleEnhanceNet, self).__init__()
self.conv1 = nn.Conv2d(3, 16, kernel_size=3, padding=1)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(16, 3, kernel_size=3, padding=1)
def forward(self, x):
out = self.conv1(x)
out = self.relu(out)
out = self.conv2(out)
return out这里先通过conv1卷积层提取图像特征,再经过ReLU激活函数,最后通过conv2卷积层将特征映射回RGB图像通道。DeepLPF也许更着重于对光照的精准估计,通过学习大量低光照图像和正常光照图像的对比,去预测出适合的光照调整参数。
3. RetinexNet
RetinexNet基于Retinex理论,将图像分解为反射率和光照分量。它的核心思想是通过估计并修正光照分量来增强图像。代码实现中,可能会像这样对图像进行分解操作:
python
import cv2
import numpy as np
def retinex_decomposition(image):
blurred = cv2.GaussianBlur(image, (5, 5), 0)
illumination = blurred
reflectance = np.log10(image + 1e-6) - np.log10(illumination + 1e-6)
return reflectance, illumination这段代码通过高斯模糊得到光照分量illumination,然后计算出反射率reflectance。之后可以对光照分量进行调整,再与反射率结合得到增强后的图像。
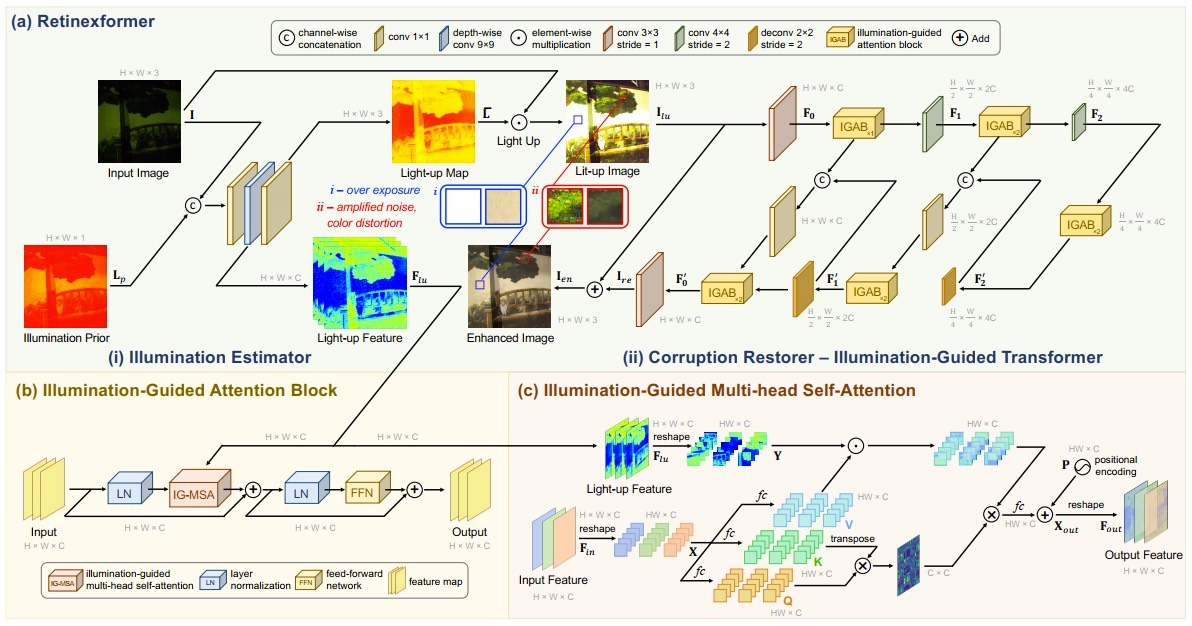
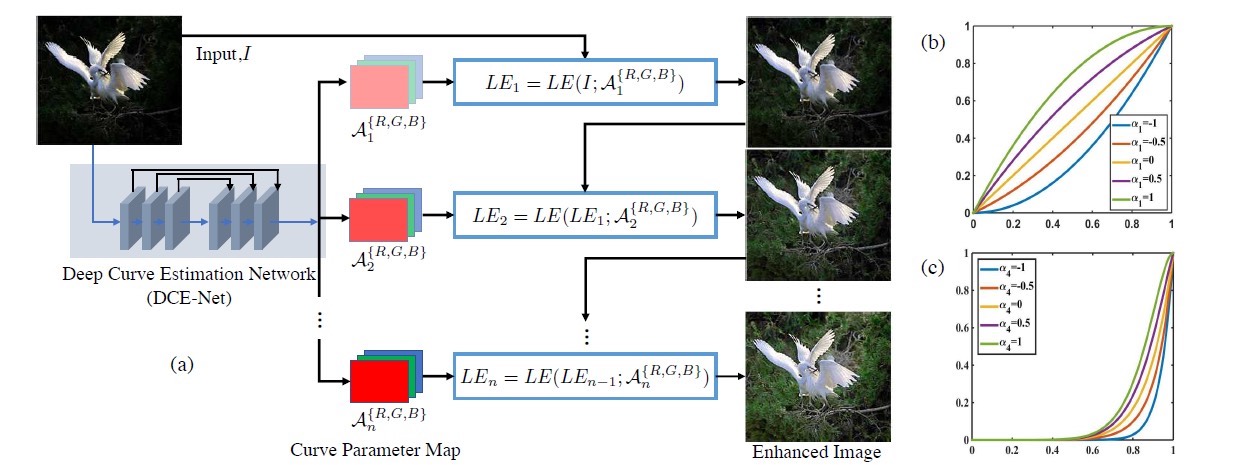
4. Zero - DCE、EnlightenGAN、RetinexFormer
Zero - DCE旨在不依赖额外监督信息的情况下增强低光照图像,它创新性地利用了一些自监督的机制。EnlightenGAN则是基于生成对抗网络(GAN)的思想,让生成器生成增强后的图像,判别器去判断生成的图像是否真实。RetinexFormer把Transformer架构引入到Retinex算法中,利用Transformer强大的全局特征捕捉能力,更好地处理低光照图像。
二、图像调色增强算法
1. HDRNet
HDRNet目标是生成具有高动态范围效果的图像。它可能会学习不同曝光度下的图像信息,然后融合这些信息来提升图像的色彩和对比度。
2. StarEnhancer、CSRNet
StarEnhancer也许侧重于对图像色彩的微调,让颜色更加鲜艳自然。CSRNet可能通过对图像结构和纹理的分析,来实现更精准的调色增强。
三、水下增强算法
1. UWGAN、UIEGAN
UWGAN利用生成对抗网络,针对水下图像的特点,如颜色偏绿偏蓝、对比度低等问题进行增强。UIEGAN则在此基础上可能加入了一些更针对水下场景的特征提取和处理方式。例如在UWGAN的生成器部分可能会有这样的代码:
python
class UWGANGenerator(nn.Module):
def __init__(self):
super(UWGANGenerator, self).__init__()
self.conv1 = nn.Conv2d(3, 32, kernel_size=4, stride=2, padding=1)
self.relu = nn.LeakyReLU(0.2, inplace=True)
# 更多层的卷积和激活函数定义
self.tanh = nn.Tanh()
def forward(self, x):
out = self.conv1(x)
out = self.relu(out)
# 多层处理
out = self.tanh(out)
return out生成器通过卷积和激活函数逐步对水下图像进行特征提取和变换,最后通过tanh函数将输出限制在一定范围,生成增强后的水下图像。
四、PyTorch架构复现及Benchmark数据集
在复现上述算法时,PyTorch是个非常好用的框架。以刚刚提到的简单低光照增强网络为例,训练过程可能如下:
python
import torch.optim as optim
# 实例化网络
net = SimpleEnhanceNet()
# 定义损失函数
criterion = nn.MSELoss()
# 定义优化器
optimizer = optim.Adam(net.parameters(), lr=0.001)
# 假设这里有低光照图像数据和对应的增强后标签图像数据
low_light_images = torch.randn(16, 3, 256, 256)
enhanced_images = torch.randn(16, 3, 256, 256)
for epoch in range(100):
optimizer.zero_grad()
outputs = net(low_light_images)
loss = criterion(outputs, enhanced_images)
loss.backward()
optimizer.step()
if epoch % 10 == 0:
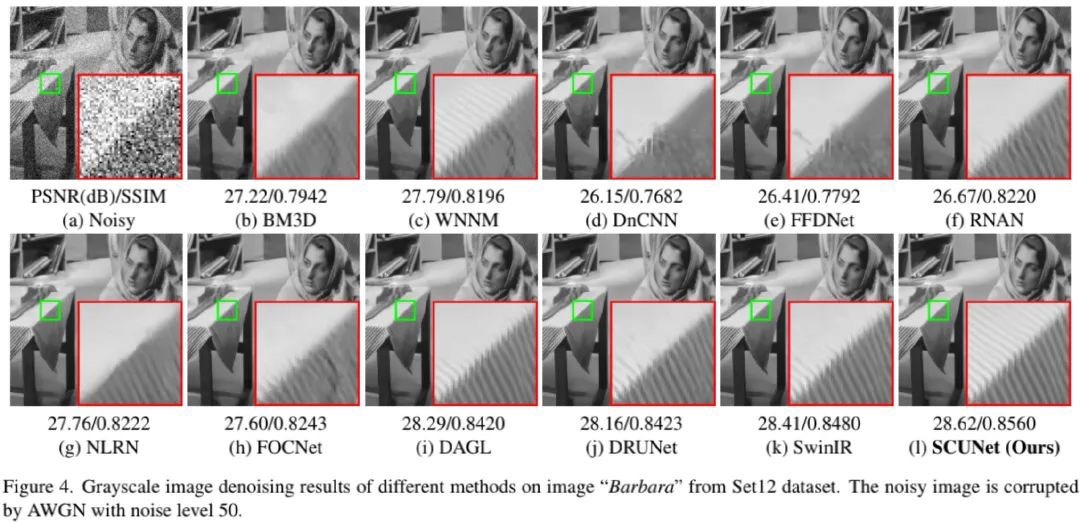
print(f'Epoch {epoch}, Loss: {loss.item()}')对于benchmark数据集,像LOL数据集(包含大量低光照和正常光照图像对)可用于低光照增强算法的评估;而对于水下增强,可以使用一些专门的水下图像数据集,如Underwater Image Database等。这些数据集可以帮助我们客观地评估算法在不同指标下的性能,比如PSNR(峰值信噪比)、SSIM(结构相似性指数)等。
深度学习在图像增强领域的发展日新月异,这些算法各有千秋,通过PyTorch的复现和benchmark数据集的评估,能让我们更好地理解和改进这些算法,为实际应用提供更强大的图像处理能力。