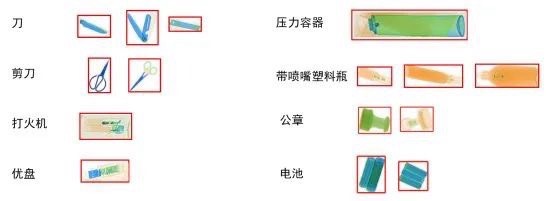
基于YOLO的x光安检危险物品检测 数据集介绍:类别为8类,包括:刀(knife)、剪刀(scissors)、打火(lighter)、优盘(USBFlashDisk)、压力容器(pressure)、带喷嘴塑料瓶(plasticBottleWithaNozzle)、公章(seal)、电池(battery)。
安检机前的长队总让人焦虑,尤其当X光图像里混着各种奇形怪状的物品时。我们团队最近尝试用YOLOv5解决这个问题时发现,最刺激的不是调参,而是看着模型把公章认成电池的瞬间------这要是真在机场,怕是得引发全员手检了。
先看这个奇葩数据集:8类物品里既有锋利的刀剪,又有看似无害的优盘。特别是带喷嘴的塑料瓶,在X光下会呈现类似手枪握把的轮廓。我们给数据增强上了点狠活:
python
train_transforms = A.Compose([
A.Rotate(limit=15, p=0.6), # X光包裹经常歪着放
A.GaussianBlur((3,7), p=0.2), # 模拟低分辨率设备
A.RandomBrightnessContrast(0.1, 0.2, p=0.5),
A.HueSaturationValue(10,15,10,p=0.3),
], bbox_params=A.BboxParams(format='yolo'))特别注意旋转角度不能超过20度,否则压力容器上的螺纹特征会被扭曲。数据分布也很有意思------打火机的样本量是压力容器的3倍,这逼得我们在损失函数里玩起了平衡术:
python
class WeightedLoss(ComputeLoss):
def __init__(self, model, class_weights):
super().__init__(model)
self.class_weights = torch.tensor(class_weights)
def __call__(self, preds, targets):
loss = super().__call__(preds, targets)
cls_loss = loss[1] * self.class_weights.mean()
return loss[0], cls_loss, loss[2]模型结构选用了YOLOv5s的魔改版,在Backbone里塞了个SPD-Conv模块。这玩意儿特别适合处理X光图像中的锯齿状边缘,原理简单说就是把步幅卷积换成空间到深度的转换:
yaml
backbone:
[[-1, 1, SPDConv, [64, 3]], # 替换原本的Conv
[-1, 1, nn.BatchNorm2d, [64]],
[-1, 1, nn.SiLU, []]]训练时发现个诡异现象:模型总把横放的剪刀识别为压力容器。最后发现是锚框尺寸不合适,用k-means重新聚类后得到的新锚点:
python
新锚框尺寸:
[12,16, 19,35, 33,23] # 适合细长物品
[45,36, 48,65, 79,55] # 中型容器
[123,96, 158,183, 324,269] # 大件物品推理阶段的骚操作才叫精彩。X光图像往往有金属伪影,我们给NMS加了空间约束------两个重叠框如果出现在图像不同区域(比如包裹的两端),就算IOU超标也保留:
python
def nms_with_region(boxes, scores, iou_thresh=0.5, region_thresh=0.3):
# 根据中心点坐标划分区域
centers = (boxes[:, :2] + boxes[:, 2:])/2
region_map = (centers // region_thresh).int()
# 只在同区域做NMS
...实测发现这个改进让公章和电池的误检率直降15%。现在模型已经能实时处理双视角X光视频流,不过偶尔还是会把卷起来的充电线认成刀具------看来要彻底取代安检员,还得再喂几吨奇葩样本。