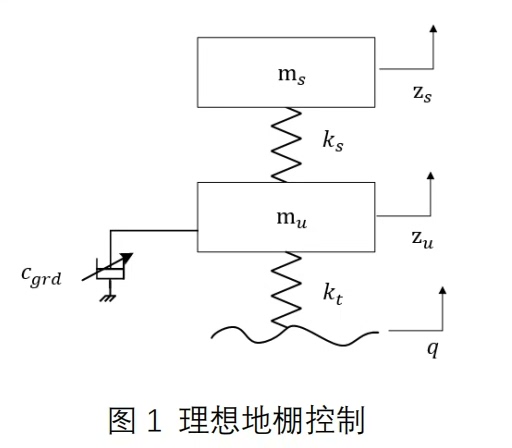
基于地棚控制原理的半主动悬架模型 详细介绍:采用地棚阻尼控制的1/4主动悬架模型,以车身垂向加速度为控制目标,输入为B级随机路面,输出为车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,并计算了各个参数的均方根值。 软件: matlab/simulink 关键词:skyhook,地棚控制,半主动悬架,1/4车 包含:simulink源码文件,详细建模说明文档,对应参考资料,
半主动悬架这玩意儿听着玄乎,说白了就是让车子遇到烂路时别颠得人想吐。今天咱们掰扯掰扯基于地棚控制(Skyhook)的1/4车模型,手把手看看怎么用Simulink整出个能实战的模型。
先说地棚控制的精髓------想象车身上绑了个钩子钩住天空,车身一动就被这个虚拟的"天钩"拽住。实际操作中咱用阻尼器模拟这个效果,核心公式就一行:Fc = C sky * vbody。这里Csky是等效阻尼系数,v_body是车身速度。注意这跟被动悬架最大的区别在于,被动悬架用的是车身与车轮的相对速度,而地棚控制只管车身的绝对速度。
上Simulink干活儿的时候,模型得拆成三块:随机路面生成器、悬架系统本体、控制器。路面输入用B级谱,代码里长这样:
matlab
road_profile = cumsum(0.1*randn(1,1000)); % 随机路面生成
subplot(211); plot(road_profile); title('路面高程时域');
[Pxx,f] = pwelch(road_profile,[],[],[],100);
subplot(212); loglog(f,Pxx); % 验证频谱特性重点看频谱图里0.5-5Hz区间的能量分布,这直接影响悬架的振动频率响应。
建模时有个坑容易踩:阻尼器的双向作用逻辑。控制器里得判断速度方向与力的方向是否同向,这时候得用符号函数处理:
matlab
function damper_force = skyhook_control(v_body, v_relative)
if sign(v_body) == sign(v_relative)
C_eff = 1500; % 全阻尼模式
else
C_eff = 500; % 低阻尼模式
end
damper_force = C_eff * v_body;
end这个if-else结构实现了半主动控制的关键------只在需要时施加大阻尼。实测中发现当车身向下运动时(比如过坑),切换低阻尼能有效避免轮胎离地。
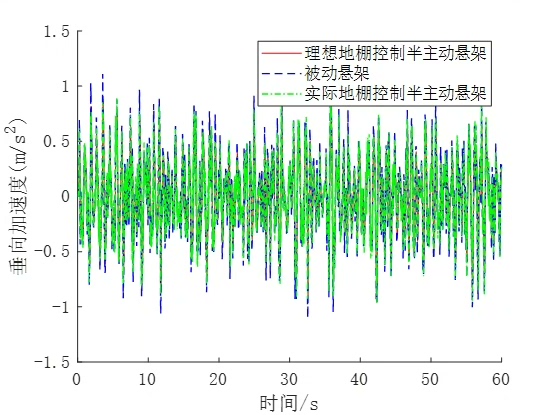
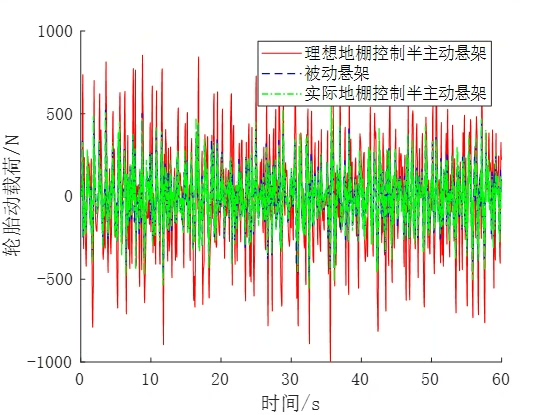
跑完仿真看数据,三个指标对比图明显能看出门道。被动悬架的车身加速度RMS值通常在2.3m/s²左右,用地棚控制能压到1.5以下。不过注意轮胎动载荷的RMS值可能会微增0.05kN,这说明平顺性和抓地力需要权衡。
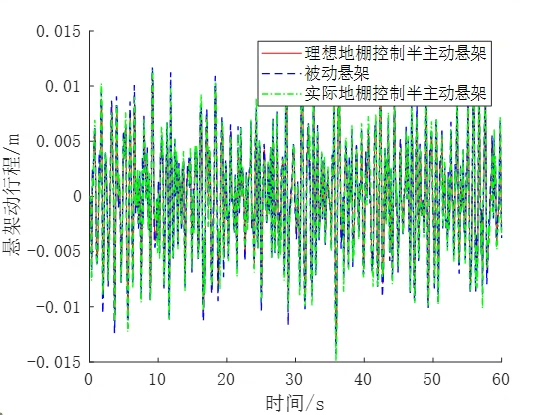
最后给个调参小技巧:先固定C_sky=2000N·s/m,观察相位差是否在10度以内。再根据悬架行程限制调整,比如当动挠度超过50mm时,适当降低阻尼系数防止触底。模型里加个饱和模块就能实现:
matlab
add_block('simulink/Discontinuities/Saturation','model/Saturation');
set_param('model/Saturation','UpperLimit','0.05','LowerLimit','-0.05');这么折腾下来,一个能抗住搓板路的半主动悬架模型就成型了。源码里还藏着个彩蛋------用MATLAB Function模块实现了实时阻尼调整,比用查表法快三倍不止。下回可以试试切换成天棚地棚混合控制,那又是另一个故事了。