无人机田间作业指南包含以下三方面:地块确定、辐射校正与航线设置
一、 确定地块
确定地块是无人机作业的第一步,目的是获取作业区域的高清影像,识别边界、障碍物、作物类型等信息,为后续的精准农业操作提供空间基础。
++1. 数据采集:++
++设备准备:++确保无人机、遥控器电量充足,SD 卡有足够空间。开机后,在 DJI Pilot 2 App 中检查连接状态和传感器状态(特别是 RTK )。
++环境选择:++选择光照充足的天气(晴朗或多云)进行航拍,以避免浓雾、雨水、大风等恶劣天气对成像质量和飞行安全的影响。
++飞行规划:++在 DJI Pilot 2 App 中进入"航线"功能,创建"建图航拍"任务。可以通过手动点击地图绘制测区范围(至少3个点形成闭合多边形),或者导入已有的KML文件来定义需要测绘的地块。
++2. 参数设置:++
++飞行高度:++决定地面分辨率(GSD)。高度越低,分辨率越高,但单次飞行覆盖面积越小。需根据任务需求权衡。
++重叠率:++航向重叠率和旁向重叠率一般建议设置70%以上。足够的重叠率是后续生成高质量正射影像图和三维模型的基础。对于地形起伏较大的地区,建议增加重叠率。
其他参数:设置航线速度(通常可设置最高15m/s)、完成动作(如自动返航)等。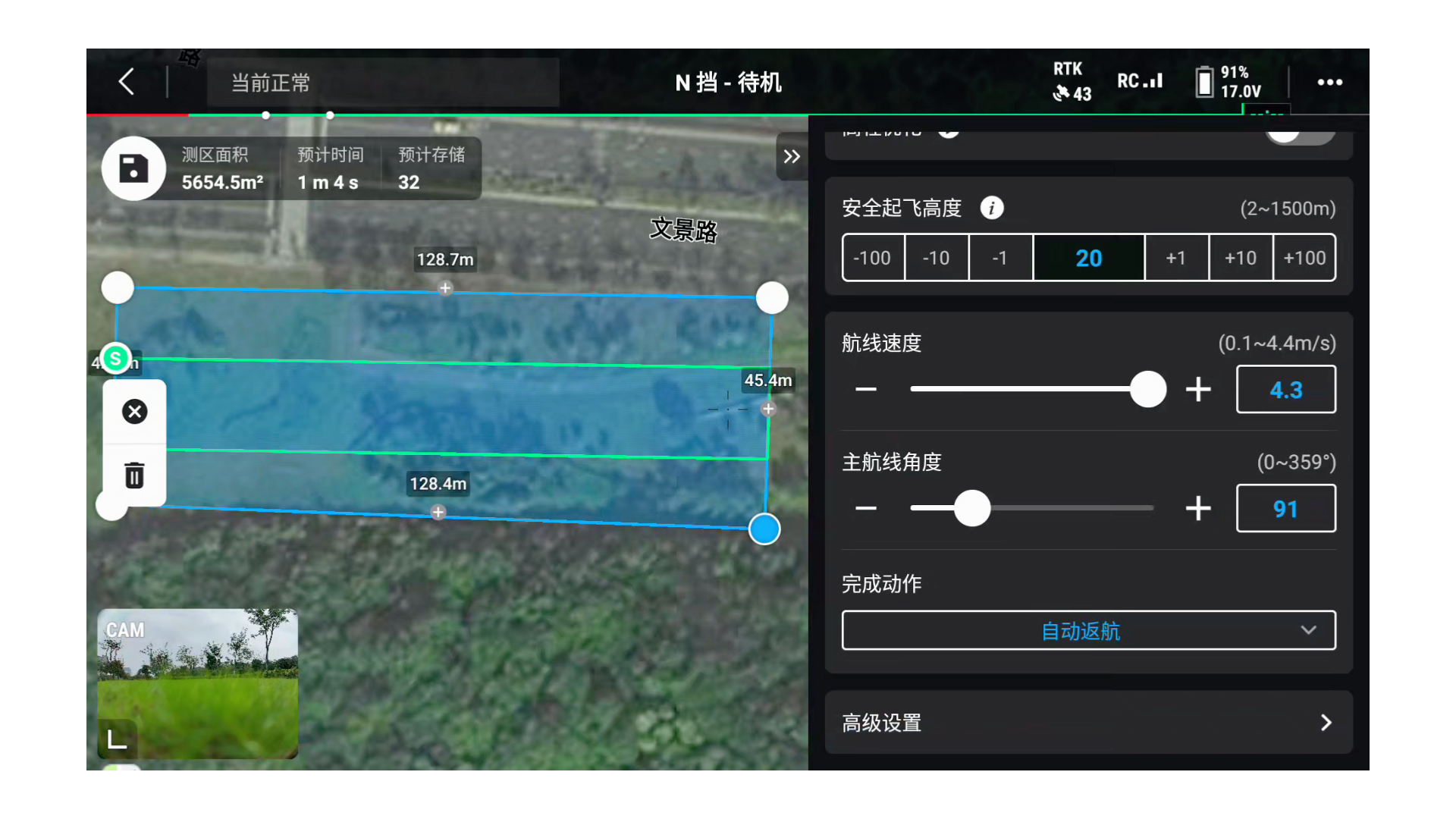
二、 辐射校正
辐射校正的目的是将相机传感器记录的原始灰度值(DN值)转换为具有物理意义的地表反射率,从而消除传感器自身响应、太阳光照角度、大气条件等因素的影响,使得不同时间、不同设备采集的数据具有可比性,这对于精准农业中的作物长势监测至关重要。
++1. 辐射校正的方法(基于标定板):++
无人机的辐射校正通常采用基于地面标定板的方法,主要步骤如下:
准备工作:
++查询太阳高度角:++选择作业当天太阳高度角大于30°的时间段进行数据采集,以确保光照充足稳定。
++准备漫反射板:++准备一块或多块(最多3块)标准反射率的漫反射板(如25%、50%、75%等)。这些标定板应在使用前保持清洁,避免刮花或污损。
++数据采集:++
在航测区域附近平坦、开阔、无遮挡的地面放置漫反射板。
手动操作无人机飞至标定板上空(高度约为标定板边长的七倍),调整云台角度为-90°(垂直向下)。
确保标定板充满画面中心区域且无任何阴影覆盖(这一点非常关键)。
照片保存模式:同时勾选可见光和多光谱

三、 设置航线
++1. 航线规划软件:++主要在 DJI Pilot 2 App 中进行。
++2. 航线类型:++
建图航拍:最常用的模式,通过自动生成"弓"字形航线获取正射影像,用于生成二维地图和DSM。
++3. 航线参数详解:++
飞行高度:直接影响地面分辨率(GSD) 和飞行效率。高度越低,GSD值越小,分辨率越高,但单架次覆盖面积越小。需根据任务要求的精度和效率权衡设置。
航速:一般可设置为15米/秒,在保证成像清晰的前提下提高效率。
重叠率:
航向重叠率:一般建议70%以上。
旁向重叠率:一般建议70%以上。
主航线角度:通常让航线方向平行于地块的长边,可以减少转弯次数,提高作业效率。
云台角度:正射影像采集时通常设置为-90°(垂直向下)。
完成动作:可选择自动返航、悬停或降落,根据情况设置。


四、采集实际案列
智农云芯(AgriBrain)自主研发的无人机一体化系统PhenoAI air是集无人机高效采集和图像智能分析于一体,自动化提取各类植物的农艺性状,精准分割,同时分析图表自动化保存,并描出植被轮廓方便用户查看识别精度。
(1)适用领域
抗逆品种选育、种质资源调查、苗情苗势、作物健康监测、生物/非生物胁迫鉴定、水肥营养监测、品种测试筛选、面积核算、水质监测、产量评估、品质品种鉴定、高产稳产、病虫害监测预警以及高产品种全生长周期的表型表现等
(2)适用作物
草业、水稻、小麦、玉米、高粱、大豆、花生、棉花、林木、中草药等
(3)拓展性强
针对个性化或细粒度提取需求,如病斑面积、杂草识别、突变株识别,分析平台支持添加任意机器学习或深度学习模型进行个性化拓展。