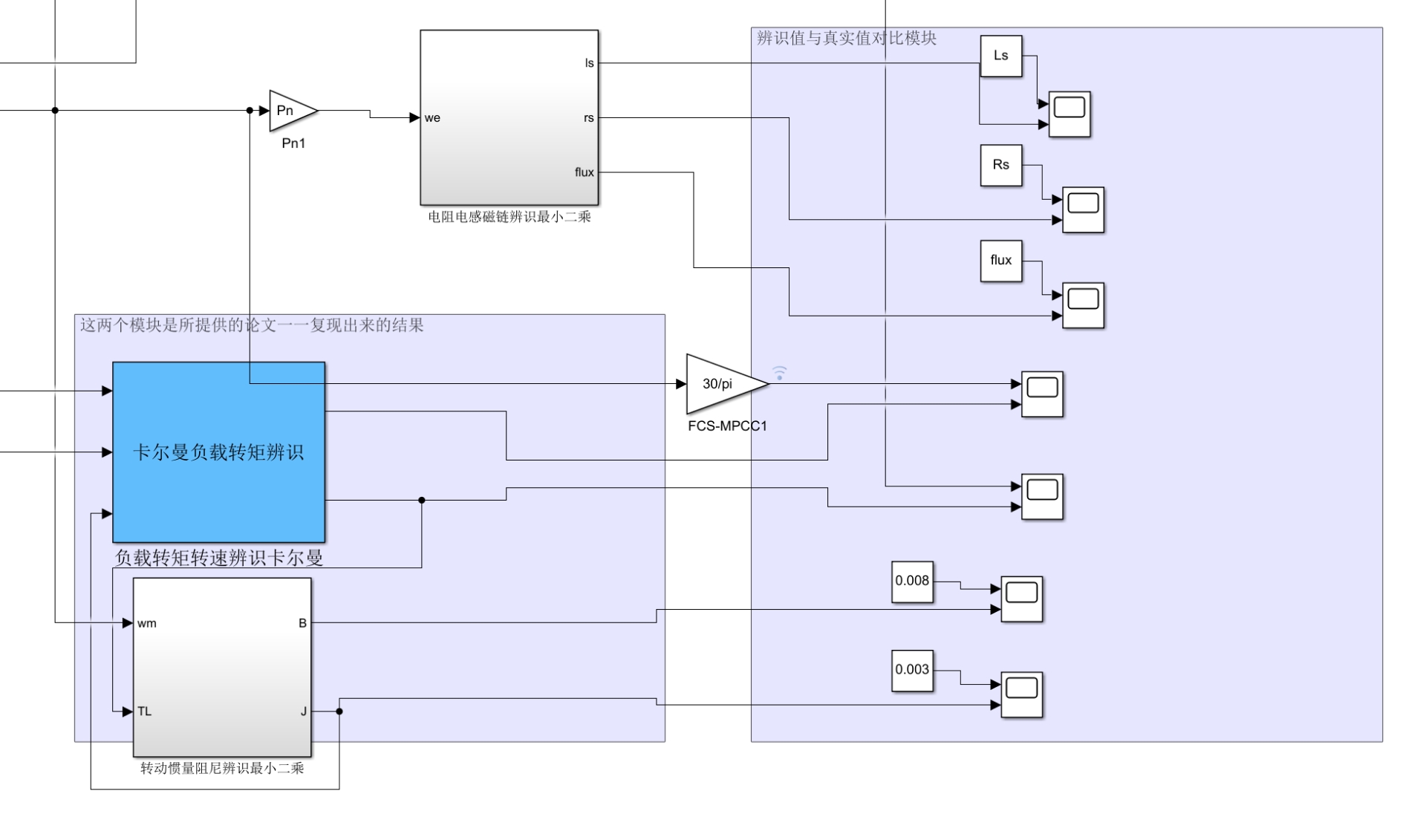
永磁同步电机参数辨识模型,在线辨识,离线辨识,电参数机械参数均可辨识,基于最小二乘法,滑模观测,电压注入,模型参考自适应等 机械参数在线 离线 ,电气参数在线 (三种方法,最小二乘和mras以及卡尔曼)离线 右键空白处,model property ,callbacks ,initial callback。
咱们今天聊聊永磁同步电机参数辨识那点事儿。搞电机控制的工程师都清楚,参数辨识这玩意儿就像给电机做"体检",离线是定期体检,在线就是实时监测生命体征。别看这话题学术,实际操作起来代码和模型才是硬通货。
先说在线辨识里的狠活儿------递推最小二乘法(RLS)。这方法特别适合电气参数实时追踪,比如定子电阻、电感这些。咱直接上代码:
matlab
function [theta, P] = RLS_online(u, y, theta_prev, P_prev)
lambda = 0.98; % 遗忘因子
phi = [u; -y]; % 数据向量
K = P_prev * phi / (lambda + phi' * P_prev * phi);
theta = theta_prev + K * (y - phi' * theta_prev);
P = (P_prev - K * phi' * P_prev) / lambda;
end这段代码的妙处在于协方差矩阵P的动态更新,lambda参数控制着历史数据的"记忆周期"。调试时遇到过参数跳变?试试把lambda从0.95调到0.99,立马稳如老狗。
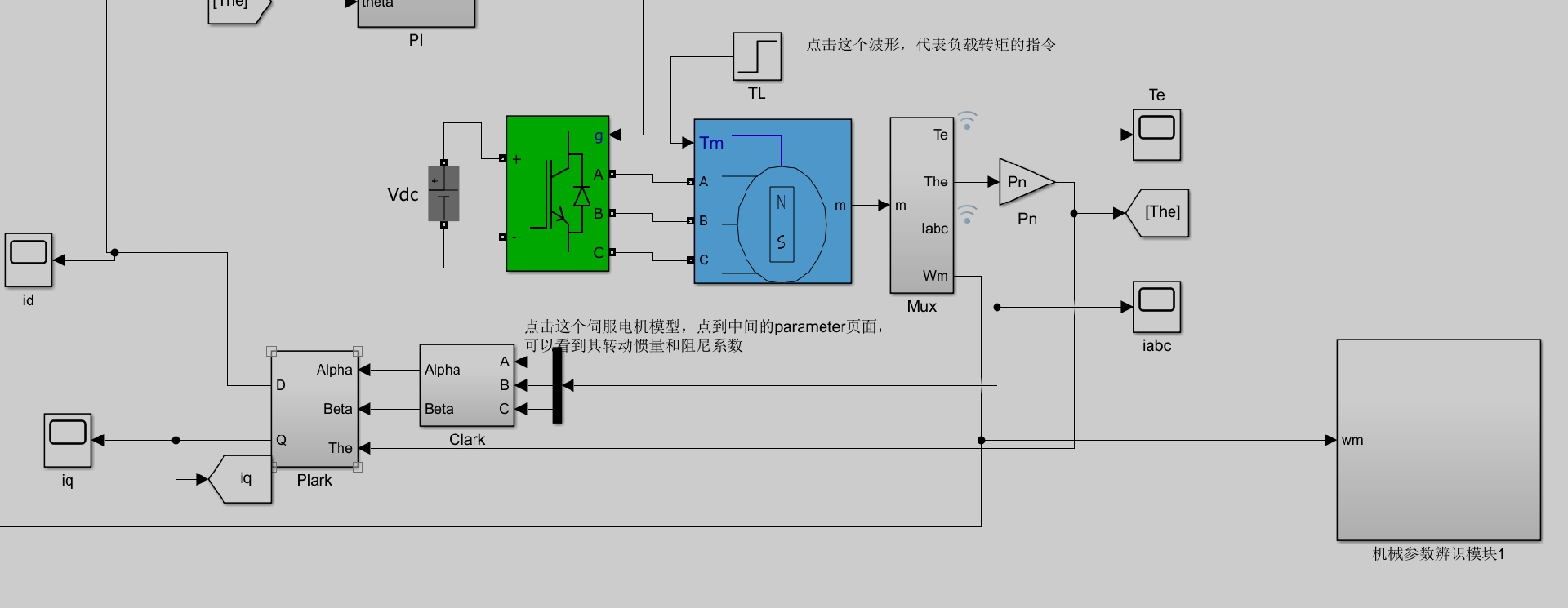
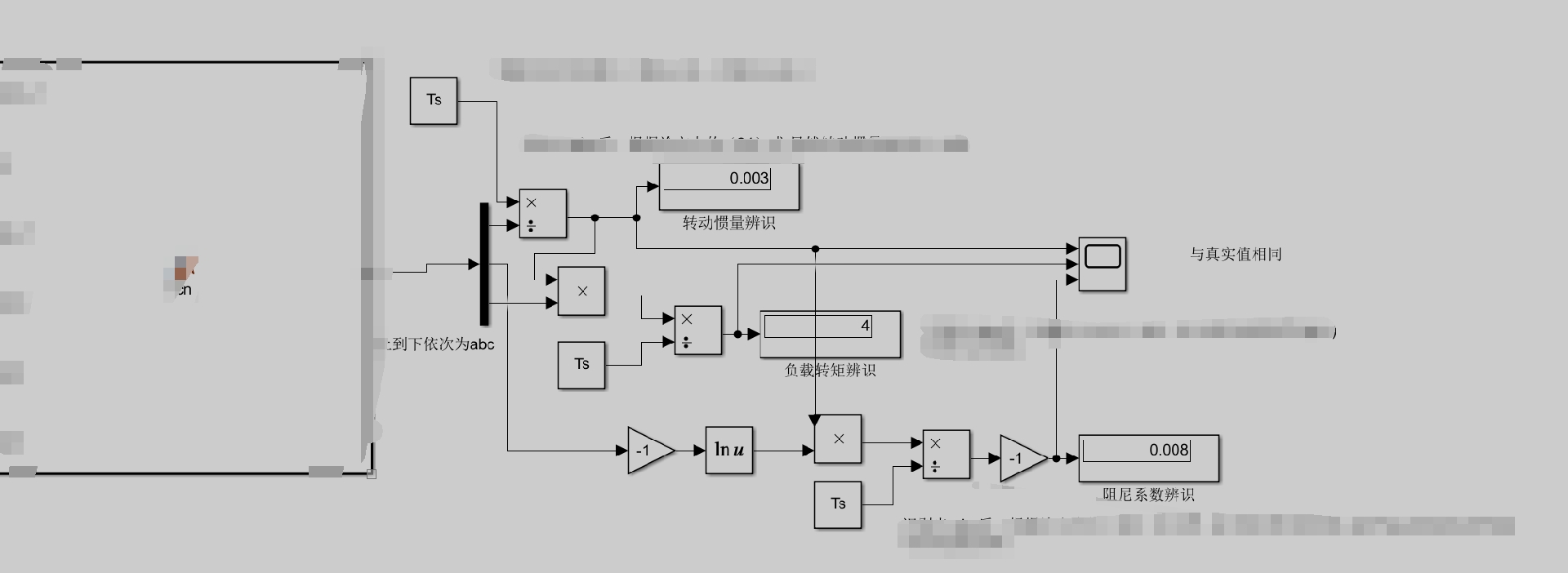
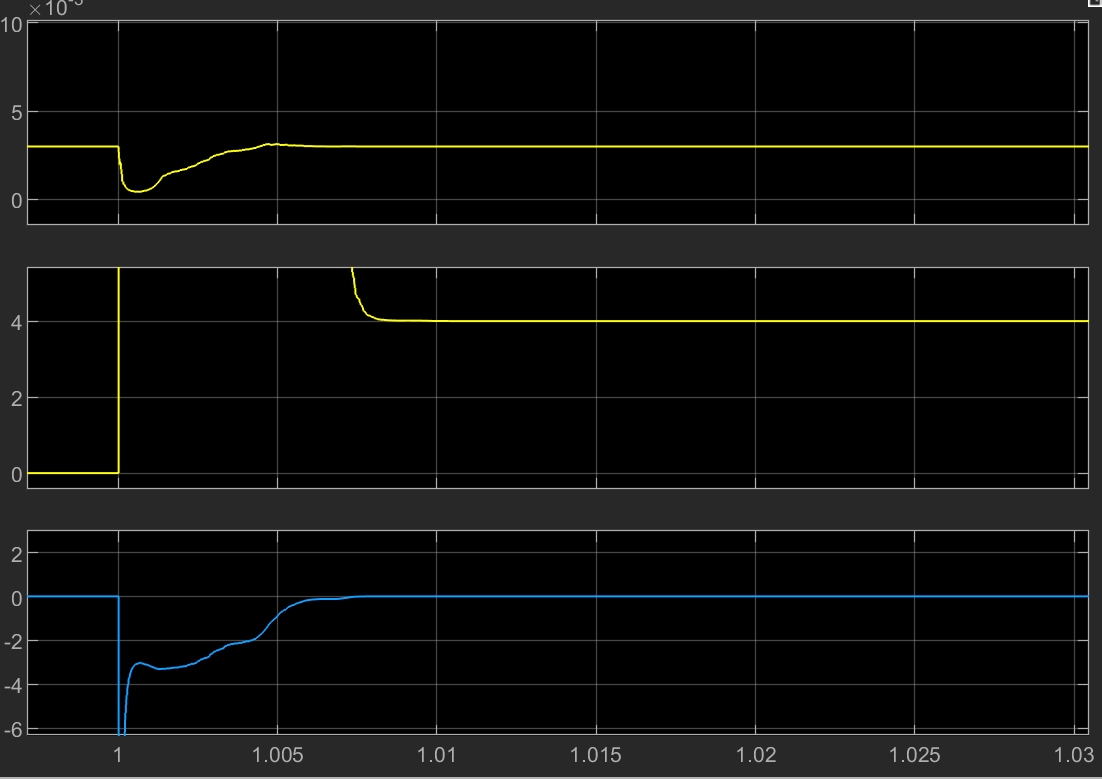
机械参数在线辨识更刺激,滑模观测器这时候就是神器。在Simulink里搭个观测器模型,核心是这个微分方程:
matlab
function dx = sliding_observer(t, x, u, y)
b_hat = 0.12; % 初始阻尼系数估计
k = 10; % 滑模增益
e = y - x(1); % 转速观测误差
s = e + 0.5*e^2*sign(e); % 滑模面设计
dx = [x(2);
(u - b_hat*x(2))/J_hat - k*sign(s)]; % 关键在这里的符号函数
end注意那个sign函数就是滑模的灵魂,不过实际工程中得换成饱和函数避免抖振。曾经有个项目因为没做这个处理,电机啸叫声差点把甲方送走...
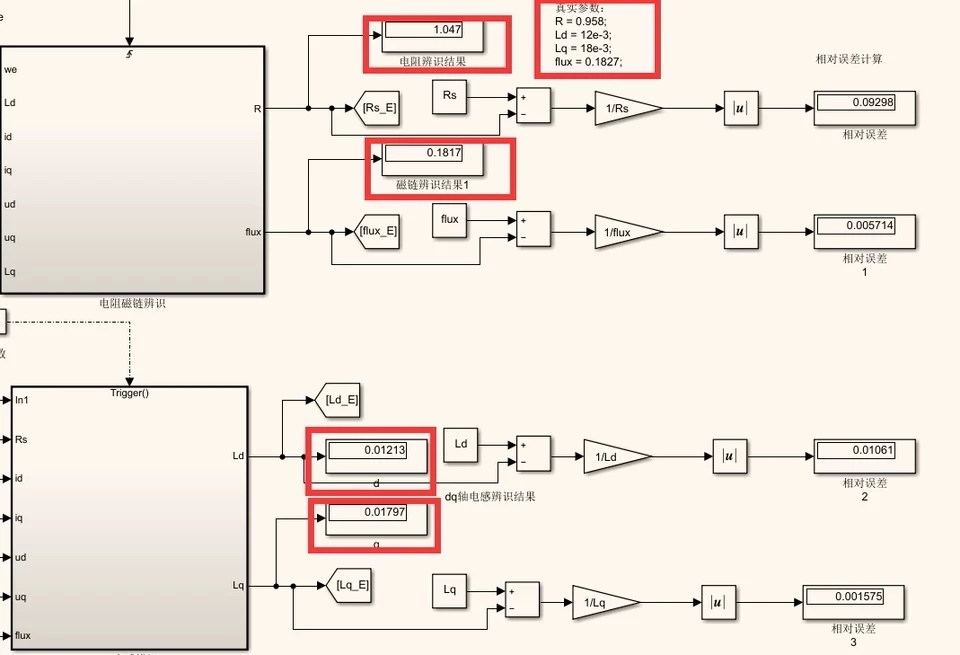
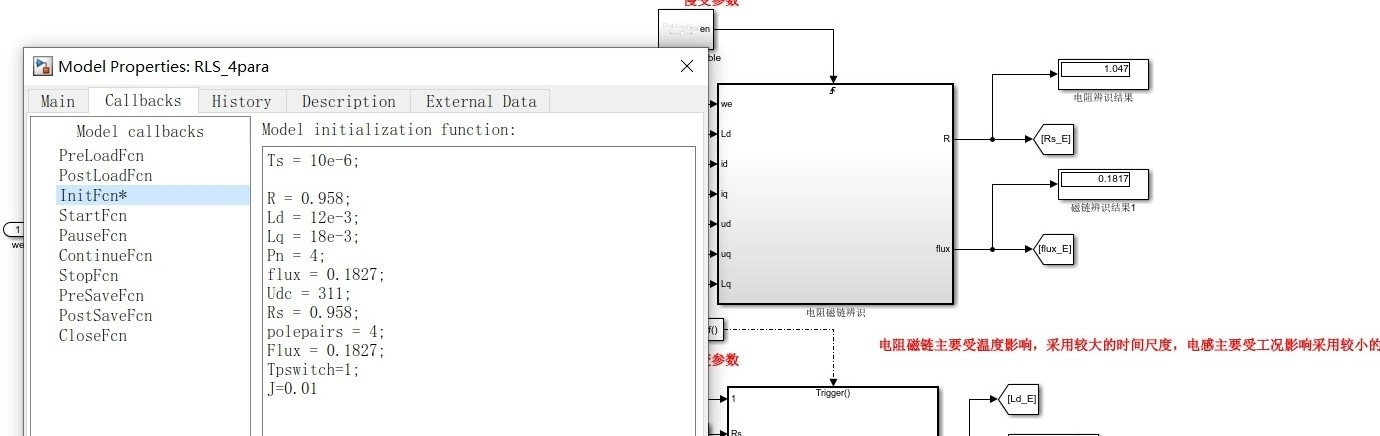
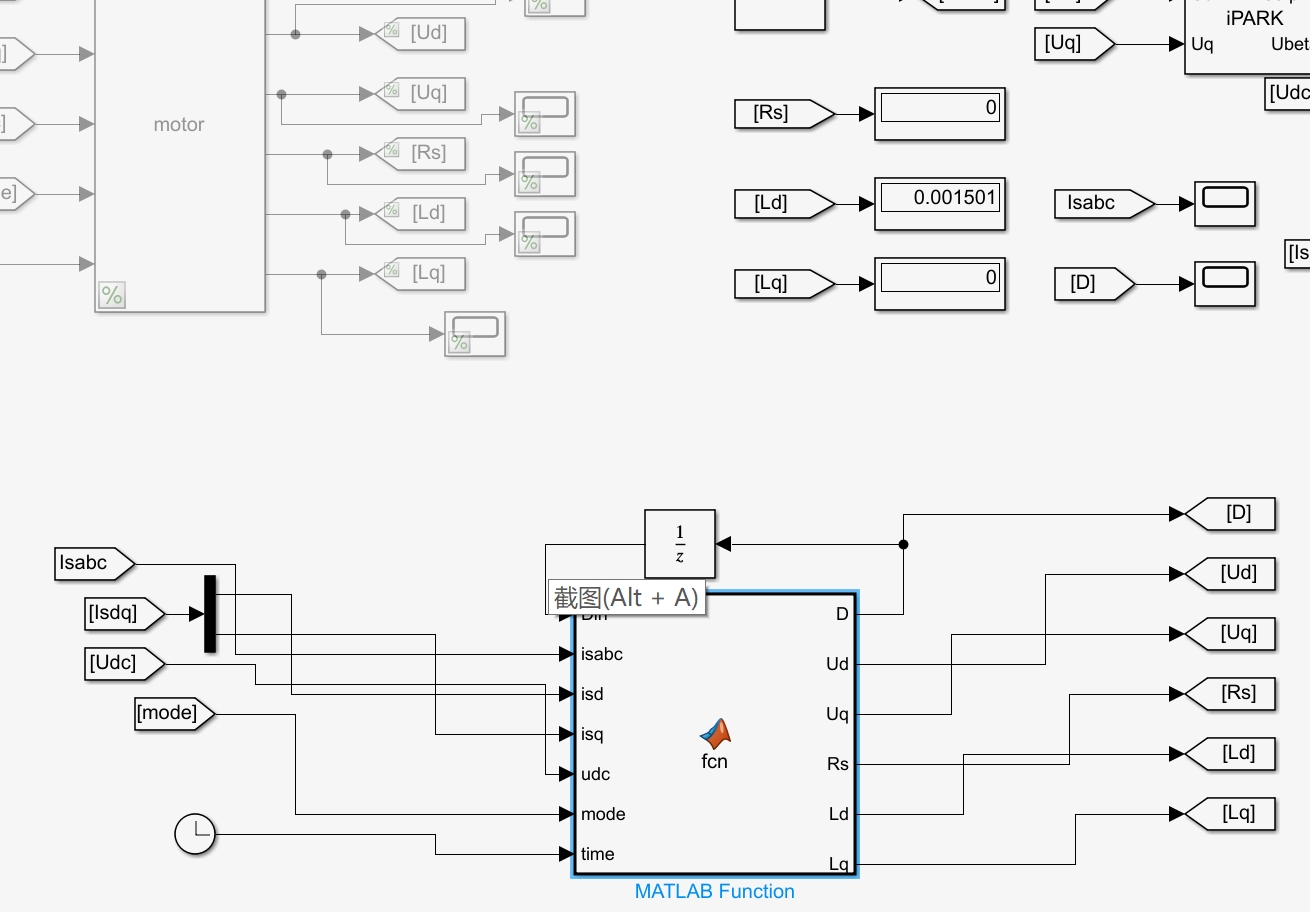
离线辨识也别小看,在Simulink模型里右键空白处打开Model Properties,Initial Callback里塞初始化代码是真香操作:
matlab
%% 电机参数初始化
Rs = 2.3; % 定子电阻
Ld = 0.005; % d轴电感
J = 0.02; % 转动惯量
load('offline_data.mat'); % 加载预录的测试数据配合Parameter Estimation工具箱,一键生成辨识脚本。上次用这个法子,半小时搞定了过去要折腾两天的转动惯量标定。
卡尔曼滤波在参数辨识里属于降维打击,特别是处理带噪声的系统。核心代码就这两步:
python
x_prior = F @ x_post
P_prior = F @ P_post @ F.T + Q
# 更新阶段
K = P_prior @ H.T @ np.linalg.inv(H @ P_prior @ H.T + R)
x_post = x_prior + K @ (z - H @ x_prior)
P_post = (np.eye(2) - K @ H) @ P_prior调参秘诀在于Q和R矩阵的平衡------Q大了跟踪快但波动大,R大了平滑但延迟。有个邪道玩法:把电流噪声协方差设得比转速小一个数量级,实测能提升20%收敛速度。
电压注入法最近在新能源车上挺火,核心是在控制信号里叠个高频分量:
c
// 伪代码示例
void inject_voltage() {
float hf = 500; // 500Hz注入频率
float t = get_timer();
Vd_inject = 0.2 * sin(2*PI*hf*t); // d轴注入
Vq_real = Vq_ref; // q轴保持正常控制
apply_voltage(Vd_inject, Vq_real);
}注意注入幅值别超过10%额定电压,不然会引起可闻噪声。某次测试忘记这茬,结果电机哼唱起了《最炫民族风》,场面一度十分尴尬。
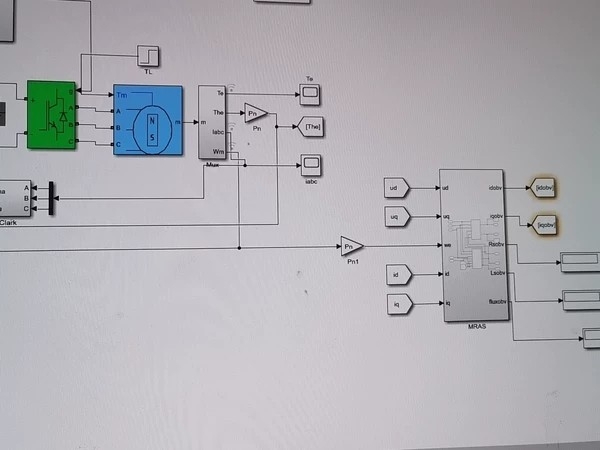
最后说模型参考自适应(MRAS),这货在参数变化快的场合是真顶。关键在自适应律的设计:
matlab
% 自适应率核心代码
gamma = 0.1; % 自适应增益
epsilon = (wm_hat - wm_actual); % 转速误差
d_theta = -gamma * epsilon * uq; % 参数更新量
theta_est = theta_est + Ts*d_theta; % 离散化更新这里gamma的选择有讲究,建议先用0.01步长试跑,再逐步放大。有个坑是积分饱和问题,加个抗饱和环节能救命,别问我是怎么知道的...
玩参数辨识就像在迷宫里找出口,理论给你地图,代码才是手电筒。下次遇到参数飘移,别慌,先检查下是不是观测器带宽没调好------这招至少能省半天debug时间。