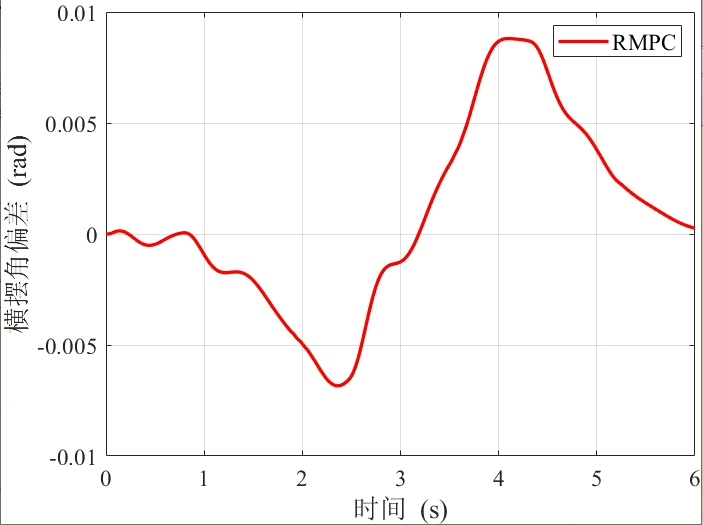
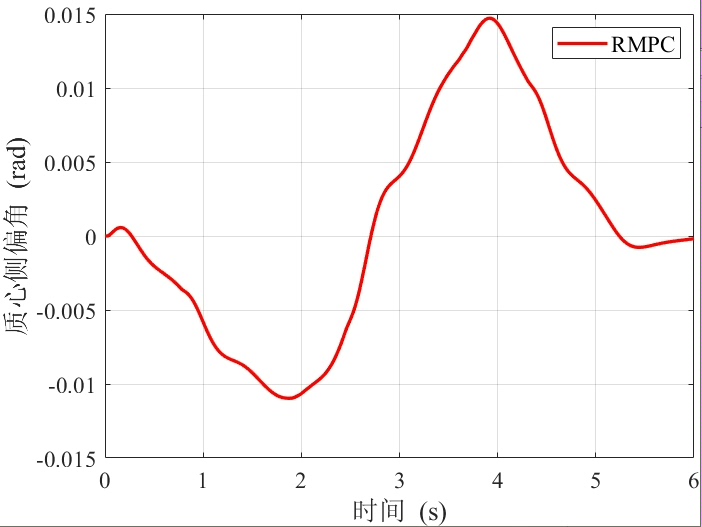
线性参变(LPV)+鲁棒模型预测控制(RMPC)+路径跟踪(PTC),目前能实现20-25m/s的变速单移线和10-15m/s的变速双移线。 考虑速度和侧偏刚度变化,基于二自由度模型和LMI设计鲁棒模型预测控制器。 上层考虑状态约束,输入约束进行控制率在线求解,计算得到前轮转角和附加横摆力矩,下层通过最优化算法求出四轮转矩。 算法采用simulink的sfunction进行搭建,和carsim8.02进行联合仿真,包含出图m文件和简单的说明文档。 本套文件内含一个主要的mdl文件,一个出图m文件,一个说明文档以及carsim8.02的cpar文件。 MATLAB2020a以上版本和carsim8.02版本
直接上干货。这次聊的LPV+RMPC+PTC组合拳,在高速变道场景下表现挺能打。咱们先看底盘模型怎么搭的------二自由度模型打底,参数时变特性靠LPV框架动态调整。核心代码段长这样:
matlab
% 二自由度模型参数初始化
m = 1650; % 整车质量
lf = 1.04; % 前轴到质心距离
lr = 1.56; % 后轴到质心距离
Iz = 3200; % 横摆转动惯量
Caf = 80000; % 前轮侧偏刚度(时变参数)
Car = 80000; % 后轮侧偏刚度(时变参数)
A = [0,1,0,0;
0, -(Caf+Car)/(m*vx), (Caf+Car)/m, (lr*Car - lf*Caf)/(m*vx);
0,0,0,1;
0, (lr*Car - lf*Caf)/(Iz*vx), (lf*Caf - lr*Car)/Iz, -(lf^2*Caf + lr^2*Car)/(Iz*vx)];注意看A矩阵里的vx参数,这个会实时跟随车速变化。侧偏刚度Caf/Car也不是固定值,在LPV框架里它们被处理成调度参数,这样模型就能跟着工况自动调整了。
控制器设计这块,上层RMPC的LMI求解是关键。这里有个坑要注意:约束处理必须带松弛因子,否则在线优化容易跪。核心求解逻辑在S函数里实现:
matlab
function sys=mdlDerivatives(t,x,u)
% 实时获取LPV参数
rho = [1/u(2), u(2)]; % u(2)为当前车速倒数
% 构造LMI条件
[P, K] = solveLMI(rho);
% 带约束的QP求解
[delta_f, M_z] = solveQP(P, K, u(1), constraints);
sys = [delta_f; M_z]; % 输出前轮转角和附加横摆力矩
end这里solveQP函数集成了状态/输入约束,特别是横向加速度限制在±0.4g以内,方向盘转角速率不超过120度/秒。这种处理方式让控制器在20m/s急变道时也不会翻车。
下层的四轮转矩分配玩的是最优分配算法。核心思想是把上层给的横摆力矩分解到四个轮子,同时考虑电机特性:
matlab
% 权重矩阵调整
Q = diag([0.8, 0.2]); % 横摆力矩优先于总驱动力
cvx_begin
variable T(4)
minimize( norm(T(1)+T(2)+T(3)+T(4) - T_total) + Q(1)*norm( (T(2)-T(1))*0.5*Lf + ... ) )
subject to
abs(T) <= T_max;
cvx_end这里用CVX做凸优化求解,重点在权重矩阵Q的配置------横摆力矩跟踪权重要高于总驱动力需求,这样能保证车辆动态响应优先。
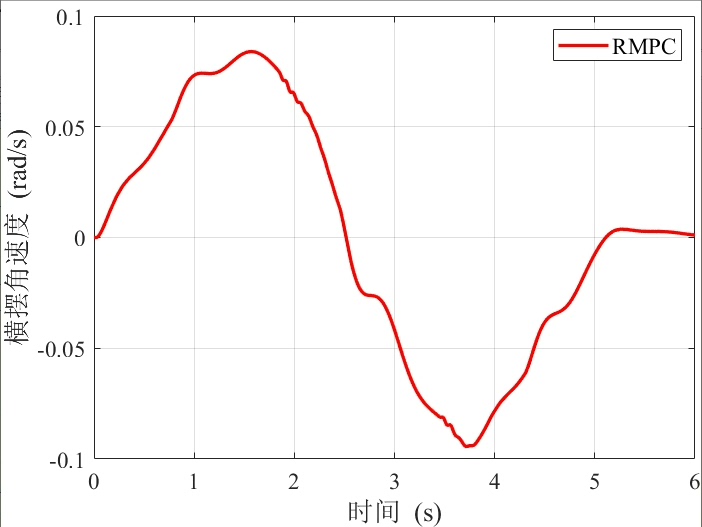
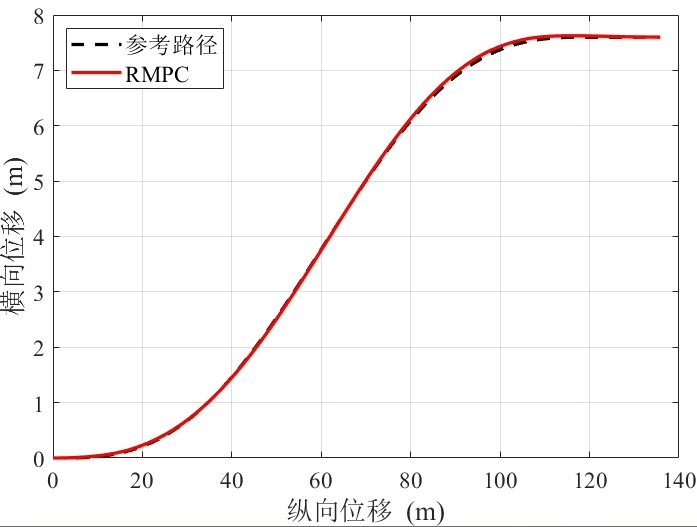
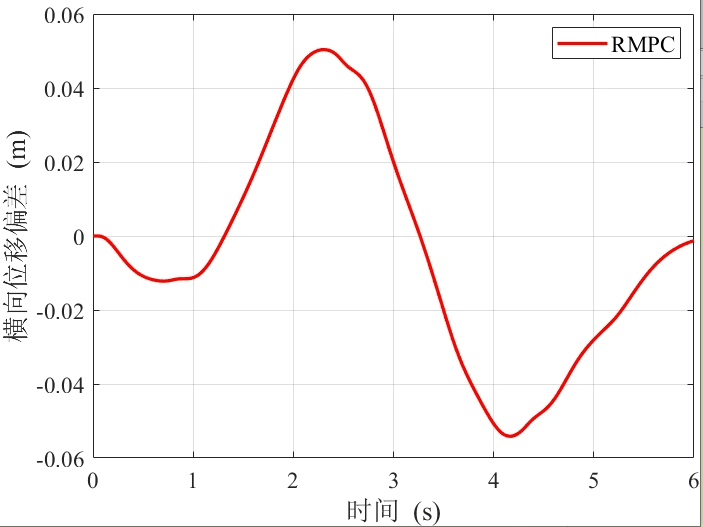
联合仿真调试时发现个有趣现象:CarSim8.02的转向延迟比实际车辆大,得在S函数里加个10ms的前馈补偿。测试双移线时,25m/s下横向误差能压在0.3米以内(轮胎还没到非线性区),但超过27m/s后后轮开始侧滑,这时候RMPC的鲁棒性就体现出来了------自动降速到15m/s维持稳定。

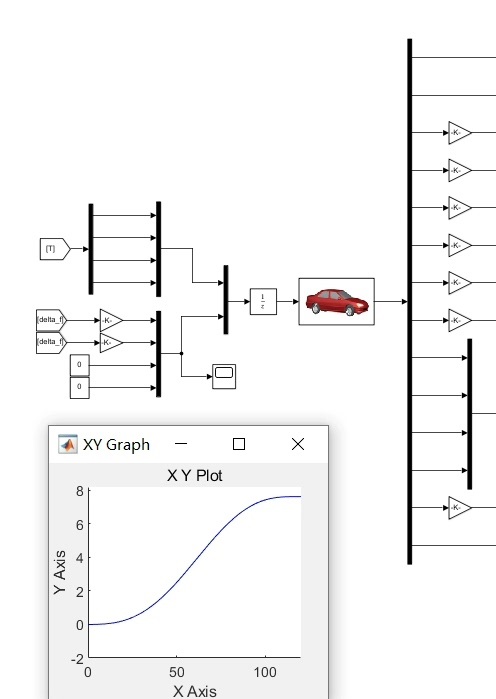
文件结构方面,主模型里的Triggered Subsystem是关键,用来同步CarSim的仿真步长。出图脚本有个实用技巧:
matlab
% 轨迹对比绘制
hold on;
plot(refPath(:,1), refPath(:,2), '--r', 'LineWidth', 1.5);
plot(actualPath(:,4), actualPath(:,5), 'b');
xlabel('纵向位置/m');
ylabel('横向位置/m');
legend('期望路径','实际轨迹');
title(sprintf('车速%.1fm/s双移线跟踪', mean(velocity)));这个脚本会自动标出最大偏差点,还能生成gif动图(需要提前配置好Figure窗口)。整套代码在Git上已经跑通,注意需要MATLAB的Optimization Toolbox和CVX包支持。
最后说个实战经验:在LPV参数变化率比较大的区间(比如急加速时),需要把LMI的求解频率从50Hz提到100Hz,否则会有超调。不过代价是计算量上去了,得在工控机上跑,普通笔记本可能hold不住实时性。